一种高空电缆的终端头位移监测方法和系统与流程
- 国知局
- 2024-11-21 11:56:42
本发明涉及电缆位移监测,尤其是涉及一种高空电缆的终端头位移监测方法和系统。
背景技术:
1、随着城市化建设逐步推进,受铁路、高架、高层建筑物的影响,架空线呼高不断增加,导致一些户外终端的承重钢管杆高度达到30多米,电缆终端固定于平台之上无法避免受到风振影响。高压电缆与电缆终端之间一旦产生位移,会造成终端漏油、附件过盈配合尺寸偏差,严重会导致电缆终端击穿甚至爆炸。
2、目前电缆位移监测工作大多依赖人工实地观察、测量,少量采用传感器监测。而传统人工巡视方式难度巨大,易错检、漏检,难以满足电缆精益化管理需求;传感器监测分为两种技术,包括靠激光来监测终端头的横向位移,另一种是靠磁力来监测终端头的纵向位移,两种技术单独存在,数据需要人工自己融合观测,较为复杂。针对此类情况,需研究可应用于户外终端的高精度电缆位移监测技术。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在需要人工自己融合观测,较为复杂的缺陷而提供一种高空电缆的终端头位移监测方法和系统。
2、本发明的目的可以通过以下技术方案来实现:
3、一种高空电缆的终端头位移监测方法,用于监测待测的终端头,所述方法包括以下步骤:
4、在终端头上设置至少一个采样板,所述采样板用于反射光束;
5、设置终端塔立柱,并在终端塔立柱上设置监测单元和校验单元,使得监测单元可纵向滑动连接所述终端塔立柱,校验单元与所述终端头的初始位置位于同一水平线上;
6、通过监测单元向所述采样板发射水平光束,并接收光束反馈以及调整监测单元的纵向位置,记录监测单元向下移动的距离和根据反馈的光束计算出的终端塔立柱与终端头之间的水平距离;
7、通过校验单元向所述采样板发射光束,并且光束发射端可上下转动,根据校验单元上下转动的角度和测量出的到采样板的距离,计算采样板的位移高度,从而对监测单元向下移动的距离进行校验;
8、所述监测单元和校验单元均设有多波长激光源、光学接收模块、光谱分析模块和自适应波长选择模块,所述光谱分析模块根据光学接收模块采集的激光信号进行光谱分析,得到识别目标的属性数据;所述自适应波长选择模块根据光学接收模块获取环境光线条件,并结合光谱分析模块得出的识别目标的属性数据,自适应调整多波长激光源发射的激光波长,以保证光学接收模块接收到的激光强度。
9、进一步地,所述自适应波长选择模块获取的环境光线条件包括光线强度和噪声水平,所述识别目标的属性数据包括识别目标的材质和颜色;所述自适应波长选择模块根据识别目标的属性数据,确定识别目标发射、吸收或散射电磁辐射的波长和强度,并结合环境光线条件,确定多波长激光源发射的激光波长的调整结果。
10、进一步地,所述监测单元和校验单元均设置为多组,每组监测单元和校验单元分别采集和计算终端塔立柱与终端头之间的水平距离以及采样板的位移高度;
11、所述终端塔立柱上还设有加权融合模块,该加权融合模块对每组监测单元和校验单元获取的数据分配对应的权重,并进行数据融合,得到最终的终端头位移监测结果。
12、进一步地,每组监测单元和校验单元分配的权重根据监测单元和校验单元的检测特性和可靠性进行设置。
13、进一步地,所述监测单元的监测过程具体包括:
14、实时向采样板发射水平光束;
15、当无法监测到光线反馈时,所述监测单元沿终端塔立柱向下移动,直至接收到采样板的光线反馈,记录此时的向下移动距离;
16、根据接收到的采样板光线反馈,计算终端塔立柱到达终端头的水平距离。
17、进一步地,所述校验单元的校验过程具体包括:
18、激光发射端从初始位置开始向下转动,当监测到光线反馈时,计算出此时校验单元到达采样板的距离,并结合监测单元计算出的终端塔立柱与终端头之间的水平距离,基于勾股定理,计算出采样板的位移高度;
19、将计算出的采样板位移高度与监测单元记录的向下移动距离对比,若相同,则记录数值进预设的纵向位移信息数组,否则通过校验单元进行多个重复测量,取平均值记录进纵向位移信息数组。
20、进一步地,所述校验单元进行采样板位移高度计算的计算表达式为:
21、
22、式中,y计算为校验单元计算出的采样板位移高度,x斜为校验单元计算出的校验单元与采样板之间的距离,x1为监测单元计算出的终端塔立柱与终端头之间的水平距离。
23、进一步地,所述监测单元和校验单元均根据发射光束和接收光束的相位差计算出水平距离,所述水平距离的计算表达式为:
24、x1=λ/2×(ν+δn)
25、式中,x1为计算出的水平距离,λ为调制光波波长,ν为相位变化整周期数,δn为相位变化非整周期数。
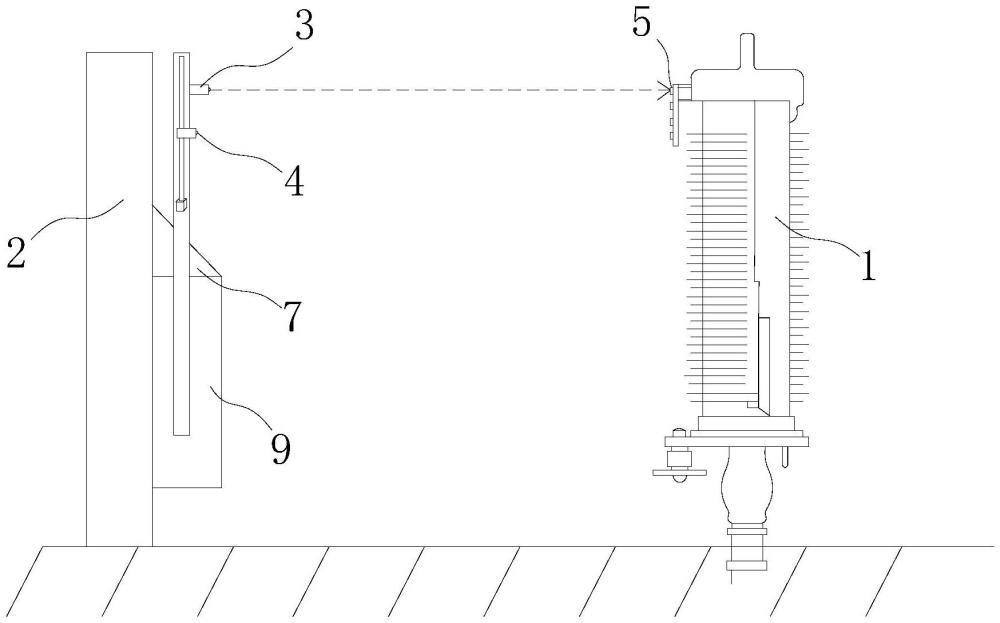
26、本发明还提供一种高空电缆的终端头位移监测系统,适用于如上任一所述的一种高空电缆的终端头位移监测方法,包括:
27、终端头,用于与高空电缆的端部连接;
28、终端塔立柱,与所述终端头的高度相配合;
29、校验单元,固定在终端塔立柱上,用于向终端头发射光束;
30、监测单元,可纵向滑动连接在终端塔立柱上,滑动方向为所述终端塔立柱的轴心方向,用于向终端头发射水平光束;
31、采样板,设置在终端头上,用于反射监测单元或校验单元发射的光束。
32、进一步地,所述终端塔立柱与监测单元之间设有用于驱动监测单元沿着所述终端塔立柱的轴向运动的驱动模块;
33、所述监测单元包括:
34、监测光束发射装置,用于向所述采样板发射水平光束;
35、监测光学接收装置,用于收集光波;
36、监测光电探测器,用于将监测光学接收装置收集的光波的光信号转换为电信号;
37、监测处理器模块,用于将监测光电探测器转化的电信号进行计算及处理,得出测量数据;
38、所述校验单元包括:
39、校验光束发射装置,可转动安装在终端塔立柱上,用于围绕球心转动,并向采样板发射光束;
40、校验光学接收装置,用于收集光波;
41、校验光电探测器,用于将校验光学接收装置收集的光波的光信号转换为电信号;
42、校验处理器模块,用于将校验光电探测器转化的电信号进行计算及处理,得出测量数据;
43、所述监测单元和校验单元均设有防雨帽,所述终端塔立柱还设有太阳能板,该太阳能板分别为校验单元和监测单元供电。
44、进一步地,所述终端塔立柱上设有带精确刻度的齿条滑道,用以测量监测单元的纵向位移,所述监测单元设有用于封装零件的壳体结构;
45、所述驱动模块包括驱动电机和与所述驱动电机驱动端连接的驱动齿轮,所述驱动电机穿过并固定于所述壳体结构上,所述驱动齿轮与所述齿条滑道的齿条啮合。
46、进一步地,所述驱动模块包括步进电机、丝杆和两根限位杆,所述步进电机的驱动端和所述丝杆的底端连接,两根所述限位杆平行设置于所述丝杆的两侧,所述限位杆和所述丝杆均穿过所述壳体结构,所述限位杆和所述丝杆的顶端均与所述终端塔立柱的顶端连接。
47、或者,所述驱动模块包括液压设备、液压杆和两根限位杆,所述液压设备的输出端与所述液压杆的底端连接,所述液压杆的顶端与所述壳体结构抵接,两根所述限位杆平行设置于所述液压杆的两侧,所述限位杆穿过所述壳体结构,顶端与所述终端塔立柱的顶端连接。
48、与现有技术相比,本发明具有以下优点:
49、(1)本发明通过在终端头旁设置终端塔立柱,在终端头上设置采样板,由终端塔立柱上的监测单元对采样板进行监测,能够精准测量终端头的水平位移,通过监测单元自身的位移可以得知测量终端的纵向位移,从而实现终端头竖直和水平位移的同时监测。
50、(2)本发明设置校验单元,能够直接识别采样板的前后位移差,同时能够辅助计算校验监测单元监测的数据是否精准,有利于人员对其的维修。
51、(3)本发明自适应多光谱激光测距与智能环境感知融合方法,将激光测距功能与现代的光谱分析技术和环境感知算法相结合,根据识别目标的属性数据,确定识别目标发射、吸收或散射电磁辐射的波长和强度,并结合环境光线条件,确定多波长激光源发射的激光波长的调整结果,实现根据测量环境自适应调整激光光谱,提供更准确的距离测量、目标跟踪和场景分析功能。
52、(4)本发明通过设置多组监测单元和校验单元进行终端头位移监测,从不同方位进行检测,并通过加权融合算法根据设备的检测特性和可靠性进行权重分配,处理多源信息,实现比单一传感器更高的识别能力和信息精度。
本文地址:https://www.jishuxx.com/zhuanli/20241120/333500.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。