一种实用化雷达目标长时多帧TBD检测算法
- 国知局
- 2024-11-21 11:55:26
本发明涉及雷达目标检测,特别涉及一种实用化雷达目标长时多帧tbd检测算法。
背景技术:
1、随着隐身技术的发展和各类无人平台的应用,雷达目标的可观测性不断降低,mf-tbd面临更加严峻的低信杂比(scr)条件,需要更长的积累检测时间。由此导致:一方面经典雷达mf-tbd算法无法高效完成目标潜在运动轨迹的搜索,存在积累增益与算法运行效率之间的突出矛盾;另一方面,经典mf-tbd算法主要依赖能量积累,在极低scr条件下会出现所谓“snr阈值”现象,积累增益接近为0。此外,已有经典雷达mf-tbd算法在不同程度上存在目标环境适应性差的问题,针对目标机动、目标起伏和多目标等多种应用背景,尚缺乏普适性的工程化解决方案。例如,ht-tbd算法难以适应非直线运动目标;dp-tbd算法和pf-tbd算法虽在机动目标检测跟踪方面有较大改进,但是在同时多目标环境下计算量显著增加,性能恶化严重;rfs-tbd类算法可适应机动多目标检测跟踪的需要,但算法计算量巨大,工程实现仍较困难。故此,我们提出了一种实用化雷达目标长时多帧tbd检测算法。
技术实现思路
1、本发明的主要目的在于提供一种实用化雷达目标长时多帧tbd检测算法和制备方法,可以有效解决背景技术中的问题。
2、为实现上述目的,本发明采取的技术方案为:
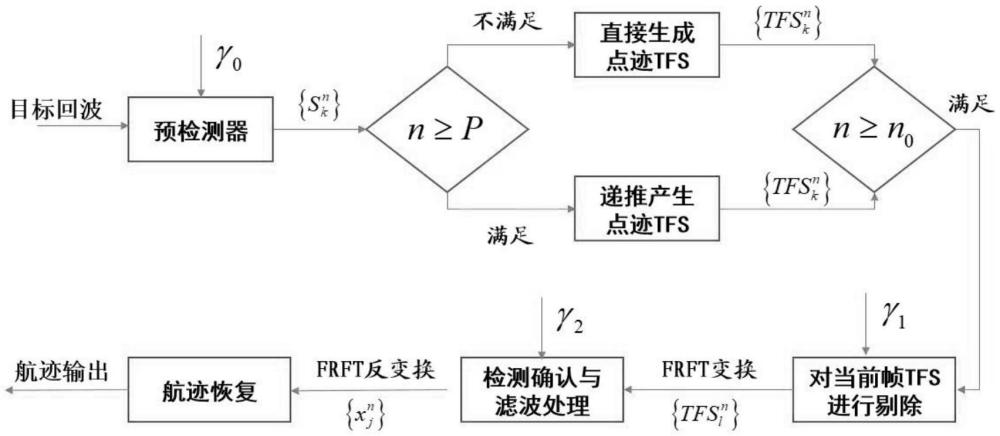
3、一种实用化雷达目标长时多帧tbd检测算法,其包括:
4、s1:对目标回波数据进行预处理与点迹提取;
5、s2:构建航迹特征信号函数;
6、s3:对数据进行筛选并递推更新航迹特征信号函数;
7、s4:对筛选和优化后的航迹特征信号函数进行特征信号处理;
8、s5:将处理完成之后的结果进行分析与输出。
9、优选的,在所述s1中,所述预处理方法包括缺失值处理、异常值检测与处理、重复数据处理与数据一致性检查。
10、优选的,在所述s2中,所述构建航迹特征信号函数的步骤为:
11、s201:定义特征表示,通过相位、频率和调频斜率来分别对应历史关联点迹的相对位置、运动速度和加速度;
12、s202:忽略干扰因素,简化模型并专注于描述理想化的目标运动特性;
13、s203:映射点迹数据,将点迹数据映射到tfs函数中,将复杂的点迹时序信息转换为信号处理问题。
14、优选的,在所述s2中,所述航迹特征信号函数的函数定义式为:
15、
16、其中:
17、
18、
19、式中:为航迹特征信号函数,与分别为坐标位置函数,为点迹在第l帧的可允许状态转移点迹序号集,ωil为第l帧的相位,为相位修正因子,x与y为点迹坐标。
20、优选的,在所述s3中,所述对数据进行筛选的步骤为:
21、s301:设置疑似点迹的航迹特征信号函数的筛选门限为γ1=η1nw,其中0<η1<1,nw为当前航迹特征信号函数筛选窗的总帧数;
22、s302:在当前帧数n大于起始帧数n0的基本条件满足后,判断航迹特征信号函数中的非零值总数是否小于γ1;
23、s303:若非零值总数小于γ1,则将该航迹特征信号函数视为杂波虚假航迹予以剔除,否则保留该函数用于后续递推与更新计算。
24、优选的,在所述s3中,所述航迹特征信号函数的递推更新公式为:
25、
26、
27、优选的,在所述s4中,所述特征信号处理的步骤包括:
28、s401:对更新、筛选后的每一个疑似点迹的x和y分量航迹特征信号分别进行frft变换;
29、s402:在frft变换空间以固定门限进行目标检测,并提取峰值参数;
30、s403:在frft域中对低于门限的谱值直接进行置零处理,以实现滤波,随后应用逆变换,实现航迹恢复。
31、优选的,在所述s401中,所述frft变换的公式为:
32、
33、式中,α为变换阶数,kα(t,u)为变换核,x(t)为待变换函数,xα(u)为变换后函数。
34、优选的,在所述s402中,所述固定门限的构建公式为
35、
36、式中,γ2为依据虚警概率设置的目标确认门限,其取值可设置为γ2=η2n,其中η2可设置为0.5~0.8之间。
37、优选的,在所述s403中,所述frft逆变换的公式为:
38、
39、与现有技术相比,本发明具有如下有益效果:
40、1、本发明创新性地引入一种新的特征表示方法,即航迹特征信号函数,航迹特征信号函数用于描述疑似点迹的全局可信度,通过相位、频率和调频斜率综合反映目标运动特性,区别于传统的能量积累方法,提高了检测的准确性和鲁棒性。
41、2、本发明提出了一种基于历史信息的航迹特征信号函数递推更新机制,利用前几帧的检测结果动态优化当前帧的航迹特征信号计算,同时结合目标最大期望速度约束,有效剔除非目标引起的虚假点迹,增强了算法在动态变化环境中的适应性和抗干扰能力。
42、3、本发明利用frft对航迹特征信号进行变换,实现了信号能量的有效积累和杂波抑制。frft作为一种先进的信号处理工具,相较于传统傅里叶变换,在处理非平稳信号和具有特定调制特性的信号时展现出优越性,提升了算法在复杂背景下的微弱目标检测性能。
技术特征:1.一种实用化雷达目标长时多帧tbd检测算法,其特征在于:其包括:
2.根据权利要求1所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s1中,所述预处理方法包括缺失值处理、异常值检测与处理、重复数据处理与数据一致性检查。
3.根据权利要求1所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s2中,所述构建航迹特征信号函数的步骤为:
4.根据权利要求1所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s2中,所述航迹特征信号函数的函数定义式为:
5.根据权利要求1所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s3中,所述对数据进行筛选的步骤为:
6.根据权利要求1所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s3中,所述航迹特征信号函数的递推更新公式为:
7.根据权利要求1所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s4中,所述特征信号处理的步骤包括:
8.根据权利要求7所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s401中,所述frft变换的公式为:
9.根据权利要求7所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s402中,所述固定门限的构建公式为
10.根据权利要求7所述的一种实用化雷达目标长时多帧tbd检测算法,其特征在于:在所述s403中,所述frft逆变换的公式为:
技术总结本发明涉及雷达目标检测技术领域,尤其为一种实用化雷达目标长时多帧TBD检测算法,包括对目标回波数据进行预处理与点迹提取;构建航迹特征信号函数;对数据进行筛选并递推更新航迹特征信号函数;对筛选和优化后的航迹特征信号函数进行特征信号处理;将处理完成之后的结果进行分析与输出。本发明所述的一种实用化雷达目标长时多帧TBD检测算法,创新性地引入一种新的特征表示方法,即航迹特征信号函数,通过相位、频率和调频斜率综合反映目标运动特性,区别于传统的能量积累方法,提高了检测的准确性和鲁棒性,在低SCR、目标起伏和同时多目标应用环境下具有良好的适用性,且计算复杂度较低,利于工程实现。技术研发人员:包中华,卢建斌,蒋燕妮,李轲,张云雷,彭培,田树森受保护的技术使用者:中国人民解放军海军工程大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333419.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。