飞机失速、偏离特性的表征方法
- 国知局
- 2024-11-21 12:18:48
本发明涉及航空大迎角气动力学领域,具体的说,是涉及一种飞机失速、偏离特性的表征方法。
背景技术:
1、飞机在大迎角区域飞行时,会出现偏离、失速、尾旋等复杂且危险的情况。设计师在进行飞机设计时,需要充分评估飞机的大迎角气动特性。为了预测和评估飞机的某一大迎角飞行特性,常常需要根据风洞试验数据,来获得在特定条件下的单一气动特性。这样的验证方式,使得飞机的气动特性不能完全性地得到评估,无法从全局的角度获得机型的大迎角气动性能。特别是在军、民航对飞机失速日益重视的现在,发展一种兼具经济性和实用性的综合评估飞机大迎角失速偏离特性的表征方法,已经迫在眉睫。
技术实现思路
1、针对上述现有技术中的不足,本发明提供一种具有严谨的逻辑性与求解框架,运算复杂程度较低,能够在一般性能的计算设备上以低机时进行快速求解的飞机失速、偏离特性的表征方法。
2、本发明所采取的技术方案是:
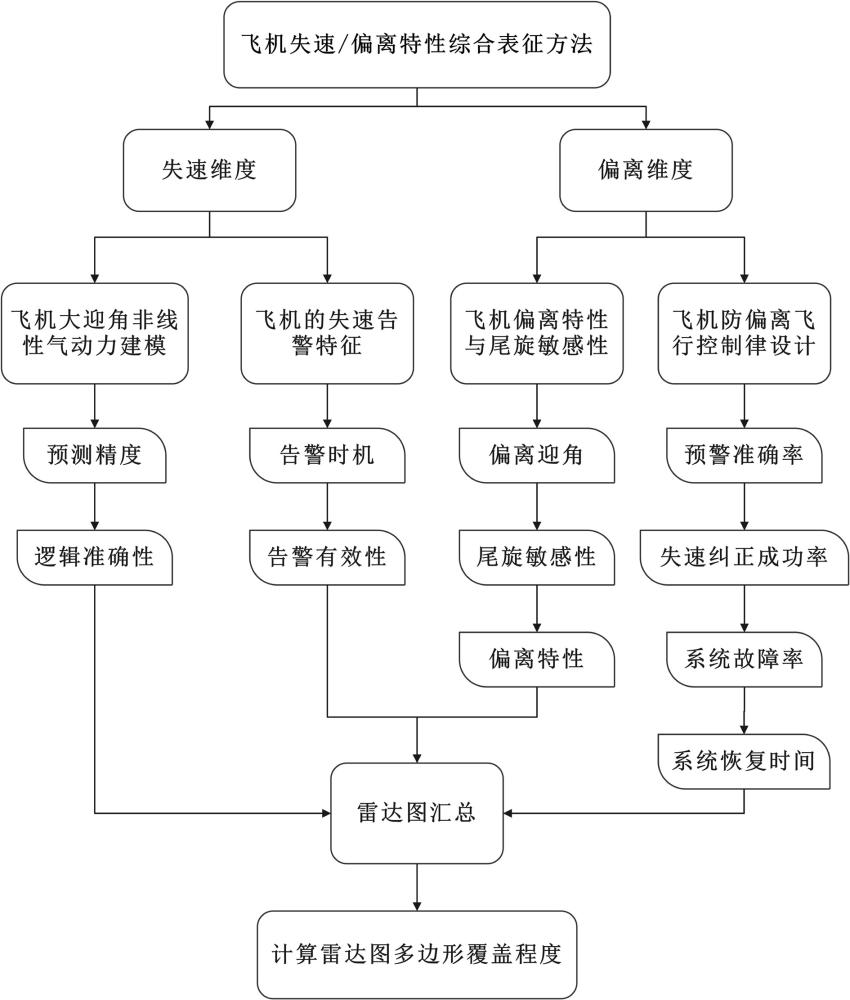
3、一种飞机失速、偏离特性的表征方法,其特征在于,包括失速维度表征方法和偏离维度表征方法;
4、失速维度表征方法包括失速函数模型的建立及相应参数的确定;
5、失速函数模型的建立包括:
6、飞机大迎角非线性气动力建模,以模型的预测精度(误差)与逻辑准确性进行评定;
7、所述飞机大迎角非线性气动力建模是基于飞行性能分析、控制律设计和飞行仿真研究而建立的数学模型;
8、偏离维度表征方法包括以静态判据获得的偏离迎角、偏离特性、尾旋敏感性与同类机型的对比作为评定指标评定飞机偏离特性与尾旋敏感性,以及以防偏离控制律的工作效能与可靠性作为评定指标,评估飞机能否自动抗偏离、能否实现无忧虑操纵。
9、优选的,飞行性能分析,通过分析飞机在不同飞行状态下的性能指标,例如升力、阻力、俯仰力矩、滚转力矩、偏航力矩等;以及飞机在不同迎角、速度、高度等条件下的气动特性,例如升力系数、阻力系数、俯仰力矩系数、滚转力矩系数、偏航力矩系数等;确定数学模型的结构,例如状态变量、输入变量、输出变量等;根据飞行性能指标和气动特性,建立飞机大迎角非线性气动力模型,并确定模型参数。
10、控制律设计,根据飞行性能指标和气动特性,确定控制律的控制目标;例如保持飞机稳定飞行、避免失速偏离等;根据控制目标,选择合适的控制方法,例如pid控制、自适应控制、鲁棒控制等;根据控制方法和气动模型,设计飞机的控制律,并确定控制律参数;
11、飞行仿真,建立包含飞机动力学模型、气动模型和控制律模型的飞行仿真模型;进行仿真试验,验证气动模型和控制律的有效性,并评估飞机在不同飞行状态下的性能;根据仿真试验结果,优化气动模型和控制律参数,以提高模型的精度和控制律的性能;
12、验证模型精度,将建立的数学模型与飞行试验数据进行对比,评估模型的预测精度;分析模型的预测误差,并找出误差产生的原因;根据误差分析结果,优化模型参数,以提高模型的精度。
13、模型应能够准确且完成地对飞机在大迎角区域的非线性气动力进行表述,模型中的气动力参数应当经过严格的辨识后得到;
14、优选的,失速函数模型为动导数模型;
15、动导数模型是通过建立气动力系数与飞机状态变量(迎角、侧滑角、角速度、舵面偏角等)之间的函数关系,来预测飞机在不同飞行状态下的受力情况;
16、动导数模型的建立过程包括:根据风洞试验数据建立大迎角气动数据库,由数据库中的多个动导数系数组成动导数模型;利用风洞试验数据和参数辨识方法(如最小二乘法、梯度下降法、牛顿-拉夫逊法等),计算模型参数的估计值;利用飞行试验数据或缩比模型飞行试验数据,对估计值的参数进行准确辨识,验证动导数模型的准确性;
17、动导数模型将气动力分解为静态气动力、振荡气动力和旋转气动力三部分。动导数模型可以用下式进行表达:
18、
19、其中,,;代表体轴系轴向力系数,代表体轴系横向力系数,代表体轴系法向力系数,代表滚转力矩系数,代表俯仰力矩系数,代表偏航力矩系数。代表迎角,代表侧滑角,、、分别代表副翼、俯仰、偏航舵偏角,单位是度;
20、上式中,表示大迎角风洞试验中的静态气动力数据项,包含舵偏为零的静态气动力项和舵面偏转引起的静态气动力增量项;
21、为大迎角风洞试验中的强迫振荡运动引起的气动力项;
22、为大迎角风洞试验中由旋转运动引起的气动力项。
23、为了保证模型具有良好的预测精度,无论是数学类建模、智能学习类建模,或是多重手段结合的综合建模方法,预测的大迎角气动特性与飞行试验相比较的误差应小于目前工程实践中常用的数学类气动模型(如动导数模型),通过采取以下措施来提高精度修正误差:
24、对于数学类建模,确保气动模型精确反映飞机的气动特性,通过详细的风洞试验数据和飞行试验数据进行验证和修正;在建模过程中,对气动特性进行合理的假设,避免过于简化的假设导致预测误差;通过优化模型参数,使预测结果更接近实际情况。
25、对于智能学习类建模,通过收集大量的飞行试验数据和风洞试验数据,为神经网络、支持向量机等算法提供足够的学习样本;利用算法对数据进行训练,并使用验证数据集评估模型的预测精度;根据预测误差,调整模型参数,优化模型结构,提高预测精度。
26、对于多重手段结合的综合建模方法,可以结合数学类建模和智能学习类建模的优点,形成互补关系,提高模型的预测精度;在建模过程中,采用交叉验证方法,评估模型的预测误差,并不断优化模型;或是结合领域权威的专家经验,对模型进行评估和调整,提高模型的预测精度。
27、优选的,对模型进行误差分析和验证优化时,首先找出误差产生的原因;例如模型参数、算法选择、数据质量等;再将模型预测结果与飞行试验数据进行对比,评估模型的预测精度;最后根据验证结果,对模型进行持续优化,提高预测精度。
28、本发明通过以下措施实现在一般性能的计算设备上以低机时进行快速求解:
29、在模型类型选择上,优先考虑简洁的数学模型,例如动导数模型,避免过于复杂的模型结构,以降低计算复杂度;或是结合数学类建模和智能学习类建模的优点,例如使用数学模型建立基础框架,再用智能学习模型进行参数优化,能够在保证精度的同时降低计算量;并且将模型分解为多个模块,例如气动模型、动力学模型、控制律模型等,模块之间相互独立,方便调试和优化。
30、在算法选择上,选择高效的数值算法进行模型的求解,例如龙格-库塔方法、牛顿迭代法等,以提高计算效率;并利用并行计算技术,将模型求解过程分解为多个子任务,在多个处理器上并行计算,以进一步缩短计算时间。
31、在逻辑框架上,建立清晰的逻辑框架,明确模型的输入、输出和计算过程,避免冗余计算,提高求解效率;表征方法分层递进,层级间的逻辑关系清晰明了,特性表征手段直接有效,无过多的逻辑转折;无复杂迭代逻辑,因此可减少迭代次数,并使用提前终止条件减少不必要的迭代。
32、优选的,飞机或机载设备给予飞行员失速告警提醒的有效时刻确定告警时机;
33、偏离维度基于飞机静稳定性的偏离特性与尾旋敏感性,是否具有不依赖人员操纵而防止偏离的能力;
34、通过偏离判据预测飞机在特定状态的偏离迎角、偏离特性与尾旋敏感性,并与同类机型进行比较。
35、优选的,所述预测精度是指将建立的气动力模型与飞行试验数据进行对比,计算预测误差;
36、预测精度评分采用相对误差百分比,满分为100分,并取所有迎角状态的平均值;
37、若模型预测的大迎角气动特性与飞行试验数据的误差小于2%,评分记为100分;
38、若误差在2%~8%之间,评分记为80分;
39、若误差在8%~15%之间,评分记为60分;
40、若误差超过15%,不得分。
41、优选的,确定动导数模型的求解框架包括以下步骤:
42、检查模型结构,模型中的所有变量都需要清晰定义,包括物理意义、单位和取值范围;模型中的所有公式都需要有明确的推导过程,包括公式的来源、假设条件和推导步骤;如果模型包含多个方程,需要检查方程组是否封闭,即是否可以通过方程组求解所有未知量;
43、检查模型逻辑,模型的输出结果具有明确的物理意义,并与实际情况相符;模型应该考虑边界条件,例如迎角、速度、高度等,并保证在这些边界条件下模型仍然有效;如果模型需要进行数值计算,需要检查模型的收敛性,确保计算结果稳定可靠;
44、检查模型验证,通过理论分析验证模型的逻辑性和准确性,与其他理论模型进行比较,或进行极限情况分析;通过试验数据验证模型的预测精度,将模型预测结果与飞行试验数据进行对比;
45、检查模型可读性,模型的文档应晰易懂,包括模型结构、公式推导、参数说明、使用方法;如果模型用计算机程序实现,代码规范,并进行注释,方便他人理解和使用。
46、逻辑准确性评分采用百分制评分;
47、若求解过程完全清晰,逻辑性强,无歧义,评分记为100分;
48、若求解过程较为清晰,但有少量不明确之处,评分记为80分;
49、若求解过程存在部分不清晰或少量逻辑漏洞,但求解结果在允许范围内,评分记为60分;
50、若求解过程存在明显不清晰或大量逻辑漏洞,则记为0分。
51、自然告警需要评估飞行员在正常生理和心理状态下对机身抖动的感知程度,以此来检查机身抖动是否在迎角达到失速迎角的60%时开始,并随迎角增加而增强;对感知程度的评估方法,包括:
52、主观评估,询问飞行员在不同迎角下对机身抖动的感知程度,例如抖动的强度、频率、位置等,确定他们对机身抖动的具体感受;例如抖动是否明显、是否能够引起注意等。
53、客观评估,测量飞行员的生理指标,例如心率、血压、皮肤电导,分析抖动对飞行员生理状态的影响,观察飞行员在抖动发生时的行为反应;例如操作杆是否发生抖动,是否出现惊慌等。
54、模拟试验,在飞行模拟器中模拟不同迎角下的机身抖动,让飞行员进行评估,并记录他们的感知程度,或利用振动平台模拟机身抖动,让飞行员进行评估,并记录他们的感知程度;
55、专家评估,邀请飞行训练专家或心理学专家,根据他们的经验和专业知识,对飞行员的感知程度进行评估。
56、由于“对机身抖动的感知程度”属于主观感受,目前没有统一的判定标准。因此可以参考一些相关的研究和经验,制定一些初步的判定标准:
57、飞行员能够感受到抖动,但不会影响操作,属于轻度抖动,即飞行员能够感知。
58、飞行员能够感受到抖动,并需要集中注意力才能保持操作稳定,则属于飞行员能够明显感知。
59、飞行员对于感受到的抖动无法确认,并需要集中注意力才能验证判断,则属于抖动不明显。
60、告警时机与告警有效性评分采用百分比形式,满分为100分;
61、若机身抖动在迎角达到失速迎角60%时开始,且飞行员能够明显感知,评分记为100分;
62、若机身抖动开始时机稍晚,但在迎角达到失速迎角70%前开始,且飞行员能够感知,评分记为80分;
63、若机身抖动开始在失速迎角前但时机晚于失速迎角70%,或早于失速迎角60%,
64、或者能在规定迎角范围内出现抖动但抖动不明显,评分记为60分;
65、若机身抖动临近失速迎角,或无抖动现象,评分记为0分;
66、人工失速告警是通过安装电子式或机械式机载设备,在飞机即将进入或正在进入失速状态时,以语音、灯光、蜂鸣、操纵杆或座椅抖动方式,能够给予飞行员足够的失速警告信息;
67、所述告警有效性涉及在复杂驾驶环境中对人工告警系统的测试,评估设备复杂性及其对飞行员操作的潜在干扰,以验证其信息的明确性和实效性;需评估设备的操作流程、界面设计、功能数量等方面的复杂程度;需评估设备可能对飞行员操作造成的干扰,例如操作难度、信息过载、误操作等;需评估设备提供的信息是否清晰易懂,例如告警信息、操作提示等;需评估设备提供的信息是否及时有效,例如告警时机、纠正措施等。
68、以在飞行模拟器中模拟飞行员在低空复杂气象条件下飞行,飞机即将进入失速状态为例。假设飞机配备了两种失速告警系统,一种是简单的声音告警,另一种是复杂的视觉告警,包含多种信息和指示灯。
69、复杂的视觉告警系统可能会分散飞行员的注意力,导致操作失误;简单的声音告警系统提供的信息较为单一,但易于理解;复杂的视觉告警系统提供的信息较为丰富,但需要飞行员进行解读;简单的声音告警系统可能在飞机进入失速状态前及时发出预警;复杂的视觉告警系统需要飞行员进行解读,可能延误预警时机。
70、让飞行员分别使用两种失速告警系统进行操作,记录他们的操作时间、操作错误率、心理负荷和生理指标等;调查飞行员对两种失速告警系统的操作体验,包括设备复杂性、潜在干扰、信息明确性和实效性等方面。
71、告警有效性以告警清晰性与不复杂性的评分形式,采用满分为100分的百分制形式;告警清晰、不复杂,表现为:
72、告警应在飞机即将进入或正在进入失速状态时及时发出,以便飞行员有足够的时间采取措施;告警应能够预测飞机进入失速状态的趋势,并提供预警信息。
73、告警信息应清晰易懂,避免使用专业术语或模糊的表达方式;告警信息应明确指出飞机所处的状态,例如“失速警告”或“偏离警告”;告警信息应直观易懂,例如使用声音、灯光、图像等方式进行呈现。
74、告警方式应与飞机其他系统的告警方式保持一致,以便飞行员快速识别;告警方式应多样化,例如声音、灯光、振动等,以提高告警的有效性;飞行员应能够根据自身需求选择不同的告警方式。
75、告警界面的设计应简洁明了,方便飞行员快速获取信息;告警信息应与其他信息进行有效区分,避免信息过载;告警操作应简单便捷,方便飞行员在紧急情况下快速操作。
76、若告警方式清晰有效,不增加飞行员的操作负担,评分记为100分;
77、若告警方式较为清晰,但存在少量干扰,评分记为80分;
78、若告警方式复杂,导致飞行员操作困难或混淆,评分记为60分;
79、若告警方式不能让飞行员获得明确的告警信息,则不得分。
80、优选的,所述偏离迎角根据临界迎角、侧滑偏离参数中立迎角、横侧操纵偏离参数中立迎角来综合确定;
81、所述临界迎角根据静力风洞试验数据获得,静力风洞试验中最大升力系数对应的迎角即为临界迎角;
82、所述侧滑偏离参数中立迎角根据侧滑偏离参数的表达公式进行计算,具体为:
83、
84、式中,为航向静稳定导数,为迎角, 为横向静稳定导数,、为飞机对机体轴的转动惯量,令右侧为0,求得的迎角即为侧滑偏离参数中立迎角;
85、所述横侧操纵偏离参数中立迎角根据横侧操纵偏离参数lcdp的表达公式进行计算,具体为:
86、
87、式中,为航向静稳定导数,为横向静稳定导数,为偏航力矩系数对副翼偏度的导数,为滚转力矩系数对副翼偏度的导数,令右侧为0,求得的迎角即为侧滑偏离参数中立迎角;
88、优选的,飞机偏离与尾旋敏感性是通过半经验稳定性静态判据进行偏离与尾旋敏感性的预测,并与同类机型的偏离与尾旋敏感性进行比较;
89、所述半经验稳定性静态判据是由侧滑偏离参数和横侧操纵偏离参数 lcdp组合而成;
90、在使用时,将作为横坐标, lcdp作为纵坐标,以迎角作为参变量,在坐标平面上划分出a\b\c\d四个区域,作出实际飞机的偏离特性曲线,从而判断飞机的偏离以及尾旋的敏感程度;
91、若曲线位于a区,则表示无偏离趋势;若曲线位于b区,则表示轻度的初始偏航发散,接着是反向滚转(轻度滚转偏离),具有低尾旋敏感度;若曲线位于c区,则表示中度初始偏航发散,接着是反向滚转(中度滚转偏离),属于中度尾旋敏感;若曲线位于d区,则表示强烈偏航发散以及反向滚转,具有高尾旋敏感度;
92、将临界迎角、侧滑偏离参数中立迎角、横侧操纵偏离参数中立迎角进行求均值,所得即为所述偏离迎角;
93、所述偏离特性为俯仰偏离特性、滚转偏离特性、方向偏离特性三个维度的综合特性,并依据飞机偏离过程的动态特性进行权重值确定;
94、当飞机迎角增大,气流分离会导致机头上仰,这是偏离过程的初始阶段,对飞机的纵向稳定性影响较大;随着机头上仰,飞机会产生滚转力矩,导致飞机发生滚转偏离,这是偏离过程的中期阶段,对飞机的横向稳定性影响较大;最后,飞机会发生偏航,这是偏离过程的最终阶段,对飞机的方向稳定性影响较大。滚转偏离和方向偏离会直接影响飞机进入尾旋的可能性,因此这两个维度的权重相对较高;俯仰偏离虽然会导致机头上仰,但如果飞机具有足够的纵向稳定性,可以避免进入尾旋,因此这个维度的权重相对较低。
95、其中俯仰偏离特性所占权重为0.3,滚转偏离特性所占权重为0.4,方向偏离特性所占权重为0.4,这是由于飞机的偏离首先反应在迎角增大后气流分离导致滚转偏离,继而是方向偏离,最后出现机头上仰,并且由于滚转偏离和方向偏离将会导致飞机进入尾旋。
96、所述俯仰偏离特性用于评估飞机纵向稳定性及稳定域边界;
97、所述滚转偏离特性和方向偏离特性用于评估对应的气动阻尼特性和气动舵面的操纵效率;
98、尾旋敏感性,与同类型飞机在相同迎角区段的尾旋敏感性进行比较,若与同类型飞机的尾旋敏感性持平,则为正常状态;较同类型飞机更为敏感,则特性较差,后续评估分数降低;若敏感性更低,则特性较好,后续评估分数较高。
99、以偏离迎角、尾旋敏感性与同类型飞机的比较,以及偏离特性的表现程度来评定飞机偏离特性与尾旋敏感性。
100、优选的,控制律设计对控制律的自动抗偏离能力、无忧虑操纵实现程度进行评估;
101、控制律的自动抗偏离能力,包括在飞机即将进入失速状态时,防偏离控制律能够迅速发出预警,并通过自动调整飞行状态,快速纠正偏离,同时在复杂飞行环境下,防偏离控制律能够有效抑制外界干扰,防止飞机因失速偏离而进入危险状态;
102、控制律的无忧虑操纵实现程度,包括在设计范围内控制律能够实现操作简便性、操作可靠性和人机交互友好性,具体是指飞行员在面临失速风险时,只需按照防偏离控制律的操作提示进行简单操作,即可实现飞机的自动抗偏离;防偏离控制律在各种已知的复杂飞行状态下均能稳定工作,确保飞行员可以进行无忧虑操纵;防偏离控制律的设计应充分考虑了飞行员的操作习惯和心理需求,需提供直观、易理解的反馈信息。
103、优选的,防偏离控制律依据如下指标进行评估:
104、失速预警准确率控制、失速纠正成功率控制、系统故障率控制,以及系统恢复时间控制;
105、所述失速预警准确率控制,是指在预定阈值内,防偏离控制律能够准确预警失速偏离的概率;
106、通过飞行模拟器进行大量模拟飞行试验,记录飞机在临界飞行状态下的失速预警情况;
107、分析预警系统的触发条件,确保其能够在飞机实际进入失速前提供预警;比较预警系统的输出与飞机实际失速状态的时间差,评估预警的及时性。
108、预警准确率评分采用百分比形式转化分数,满分为100分,即预警准确率为100%,并取所有试验的平均值。若预警系统在飞机进入失速前5秒内发出预警,准确率记为100%准确,评分为100分;若预警时间在5-10秒内,准确率记为80%,评分为80分;若预警时间超过10秒,或者未能预警,准确率记为0%,评分为0分;
109、失速纠正成功率控制,是指在预警后飞机能够成功纠正失速偏离的概率,其评估方法为使用飞行模拟器模拟飞机失速偏离情景,记录防偏离控制律的纠正效果;
110、失速纠正成功率评分采用百分比形式转化分数,满分为100分,即纠正成功率为100%,并取所有试验的平均值。若飞机在预警后5秒内成功回归安全飞行状态,记为100%纠正成功,评分为100分;若回归时间在5-10秒内,纠正成功率记为80%,评分为80分;若回归时间超过10秒,或者未能成功纠正,则不得分;
111、系统故障率控制,是指所设计的飞机防偏离控制律在实际运行中的故障发生率,其评估方法为通过长时间的实际飞行试验和模拟试验,记录防偏离控制律的故障情况,并采用每千飞行小时故障次数(ffh)作为指标;
112、若ffh小于0.1,评分记为100分;若ffh在0.1~1之间,评分记为80分;若ffh超过1,评分记为60分;
113、系统恢复时间控制,是指在控制律发生故障后,防偏离控制律恢复正常工作所需的时间,通过在模拟试验中故意引入故障并记录系统从故障发生到恢复正常工作的时间,来评估控制律系统的自诊断和恢复能力;
114、恢复时间评分采用时间阈值法,满分为100分。若系统在0.5分钟内恢复正常,评分记为100分;若恢复时间在0.5~2分钟内,评分记为80分;若恢复时间超过2分钟,评分记为60分。
115、本发明相对现有技术的有益效果:
116、更具全面性,本发明从失速和偏离两个维度对飞机大迎角特性进行全面评估,涵盖了气动模型、失速告警、特性预测、控制律设计等多个层面,比现有技术更全面;本发明不仅评估气动特性,还评估失速告警的时机和有效性,以及偏离特性、尾旋敏感性、防偏离控制律的工作效能和可靠性等,比现有技术更全面地反映飞机的安全性。
117、更具高效性,本发明采用的建模方法和评估框架运算复杂度低,能够在一般性能的计算设备上快速求解,比现有技术更高效;本发明通过多边形雷达图直观地展示飞机的失速/偏离特性,方便快速识别优势和不足,比现有技术更直观高效。
118、更具易操作性,本发明采用清晰的逻辑框架和评估流程,易于理解和操作,比现有技术更易于应用;本发明采用多边形雷达图可视化展示评估结果,直观易懂,比现有技术更易于理解和应用。
119、更具应用广泛性,本发明适用于不同类型的飞机,包括军机和民航客机,具有广泛的应用价值;本发明可用于飞机设计的各个阶段,包括方案设计、初步设计和详细设计阶段,为飞机设计提供参考。
本文地址:https://www.jishuxx.com/zhuanli/20241120/335164.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表