一种改进YOLOv8的X射线安检图像危险品检测系统
- 国知局
- 2024-12-06 12:10:25
本发明属于x射线安检图像危险品检测领域。
背景技术:
1、机场、轨道交通、海关等公共场所对违禁物品的行李安检需求不断增加。传统的x射线安检主要依靠人工筛选,不仅效率低下,而且其准确性和稳定性受到安检人员经验和集中程度的限制,导致漏检和误报。为了提高x射线安检图像危险品检测的准确性和效率,基于深度学习的违禁物品x射线安检图像危险品检测技术应运而生。
2、x射线安检图像有一些独特的特点,增加了利用计算机视觉技术进行危险品检测的难度:
3、1.杂乱的物品问题:行李内的物品通常排列混乱。x射线具有透射效应,在安检图像中,危险品经常出现重叠。
4、2.成像角度问题:固定透视x射线容易造成危险品成像角度不佳,难以准确有效地提取违禁物品特征。
5、3.危险品尺寸问题:违禁物品的检测可以看作是一个多尺度、多目标的检测问题。尺寸差异容易导致检测模型忽略较小的目标,甚至造成漏检。
6、基于深度学习的目标检测算法主要分为二阶段和一阶段两类。二阶段目标检测算法包括两个步骤:首先进行区域生成,根据输入图像生成可能包含目标的候选框;然后利用卷积神经网络对候选框进行进一步的分类和位置校准,典型的算法有region-convolutional neuralnetwork(r-cnn)和space pyramidpooling-network(spp-net)等。这类算法具有较高的检测精度,但由于其复杂的处理过程,检测速度较慢,无法满足x射线安检图像危险品检测对实时性的要求。相较之下,一阶段目标检测算法通过网络直接回归目标的类别概率和位置坐标值,无需生成候选框。典型的一阶段算法包括single shotmultibox detector(ssd)系列和you only lookonce(yolo)系列等。yolov8模型提供了5种不同的尺寸的网络结构(n,s,m,l,x),可以更好地满足不同场景的需求,提高了检测的实时性和准确性,在x射线安检图像中的危险品检测方面具有很大的发展潜力。
技术实现思路
1、本发明是为了解决x射线安检图像中重叠目标检测精度不高的问题,现提出了一种改进yolov8的x射线安检图像危险品检测系统。
2、本发明所述的一种改进yolov8的x射线安检图像危险品检测系统,包括:
3、步骤一、对x射线安检图像数据集(pidray)进行数据增强的处理;
4、步骤一一、将pidray数据集的格式从json格式转换为txt格式;
5、步骤一二、采用水平翻转进行数据增强处理,并将参数(flip)设置为0.5,这允许模型学习对象的镜像表示,增强对方向变化的鲁棒性;
6、步骤一三、采用scale transformation进行数据增强,并将参数(scale)设置为0.5,这使得模型能够适应不同大小的物体,这对于检测不同距离的相同物体至关重要。
7、步骤二、结合yolov8,引入gelan(generalized efficient layer aggregationnetwork)和ema(effcient multi-scale attention)模块进行改进,更新损失函数为inner-ciou,构建yolo-gema网络;
8、步骤二一、在yolov8的backbone和neck中中,采用gelan网络架构,并且在gelan中任意块中采用repncsp,增强网络特征提取能力,提高计算效率;
9、步骤二二、在yolov8的neck中加入ema模块,增强对x射线安检图像中重叠危险品的检测能力;
10、步骤二三、将损失函数改进为inner-ciou,提升对不同尺度预测框准确性,加快模型收敛速度;
11、步骤三、利用训练集对改进的yolov8模型进行训练,得到x射线安检图像检测模型。
12、步骤四、利用测试集对训练好的x射线安检图像检测模型进行测试。
13、进一步地,本发明中,步骤一中,选择公开的pidray数据集进行模型的训练和测试,并进行数据增强。
14、步骤一一、首先将数据集的格式从json格式转换为txt格式,该数据集包含已划分的训练集和测试集,数据集的划分结构如表1所示。在本发明中,训练集采用train,测试集采用test中的easy模式。
15、表1pidray数据集结构划分表
16、
17、步骤一二、采用水平翻转,并将参数(flip)设置为0.5,这允许模型学习对象的镜像表示,增强对方向变化的鲁棒性;
18、步骤一三、采用scale transformation进行数据增强,并将参数(scale)设置为0.5,这使得模型能够适应不同大小的物体,这对于识别不同距离的相同物体至关重要。
19、进一步地,本发明中,步骤二中,结合yolov8,引入gelan和ema模块进行改进,更新损失函数为inner-ciou,构建yolo-gema网络;
20、步骤二一、在yolov8的backbone和neck中采用gelan网络架构:
21、在x射线安检图像危险品检测中,gelan架构结合了repncsp模块,该模块具有优化的梯度路径和高效的特征融合能力,对提升检测精度和速度至关重要。通过将cspnet的梯度路径优化与elan的层聚合效率相结合,repncspelan4模块显著增强了特征提取能力,特别是在处理具有重叠和大小不一的物品时。该模块优化了梯度传输并减少了计算负载,使网络能够快速准确地识别和定位危险品,尤其在物品排列混乱和大量重叠的情况下。其轻量化设计确保了高效的实时应用,适用于各种模型规模和复杂性。
22、步骤二二、在yolov8的neck中加入ema模块,增强对x射线安检图像中重叠危险品的识别能力。
23、在x射线安检图像检测系统中,通道或空间注意力机制在生成更可区分的特征表示方面表现出显著效果。然而,当建模跨通道关系时,减少通道维度可能会对深度视觉表示的提取产生负面影响。本文采用了一种高效多尺度注意力模块(ema)。
24、ema模块在增强x射线安检图像检测系统的有效性方面起着关键作用。其设计利用通道和空间注意力机制来提高必要的特征区分能力,以便在x射线安检图像中准确高效地检测违禁品。通过保持完整的通道维度并集成多尺度卷积结构(1×1和3×3卷积),ema模块有效捕捉了详细和更广泛的空间特征。这种能力对于区分x射线安检图像中通常混乱排列的行李内重叠的物品至关重要。ema模块的并行子结构使其能够处理行李中不同大小的物品。多尺度设计使得该模块能够检测可能被忽略的小物品,同时准确描述大物品,从而应对多尺度检测的挑战。通过集成增强的注意力机制,专注于x射线安检图像中的兴趣区域,ema模块减少了误报和漏检的可能性。
25、对于任何给定的输入特征图,ema将其在通道维度上划分为g个子特征,以学习不同的语义。一般假设每个子特征包含c/g个通道,学习到的注意力权重将用于增强每个子特征中感兴趣区域的特征表示。
26、ema采用三条并行路径从分组特征图中提取注意力权重描述符。两条路径在1×1分支中,而第三条路径在3×3分支中。1×1分支使用两个1d全局平均池化操作来沿两个空间方向编码通道,而3×3分支使用单个3×3卷积核来捕捉多尺度特征表示。
27、ema通过建立通道和空间位置之间的相互依赖关系,采用跨空间信息聚合方法,实现更丰富的特征聚合。1×1分支和3×3分支的输出经过2d全局平均池化编码全局空间信息后,再通过通道特征的联合激活机制进行转换,最终得到两个空间注意力图。最终输出特征图作为两组空间注意力权重值的聚合,通过sigmoid函数得到。
28、步骤二三、将损失函数改进为inner-ciou,提升对不同尺度预测框准确性,加快模型收敛速度;
29、在x射线安检图像危险品检测中,利用inner-iou损失函数可以显著提升边界框回归的精度和速度,这对于检测准确性至关重要。x射线安检图像通常涉及复杂的背景和重叠物品,传统的iou损失函数在这些情况下可能会导致梯度消失或收敛缓慢。inner-iou通过引入辅助边界框和比例因子来优化损失计算,使模型能够快速调整预测框,以准确捕捉各种尺寸的危险品。此外,inner-iou的实现有助于减少由于物品尺寸显著变化而导致的检测错误,从而提高检测的整体效率和准确性。
30、进一步地,本发明中,步骤三中,利用训练集对改进的yolov8模型进行训练得到x射线安检图像检测模型;
31、修改yolov8的cfg文件,包括将数据的yaml文件中的classes修改为数据集所标注的类别数量。设置网络模型的超参数,包括用于训练数据集和测试模型性能时的输入图片尺寸大小、每批次的输入数据量batch、训练轮数epochs、学习率lr0和lrf。
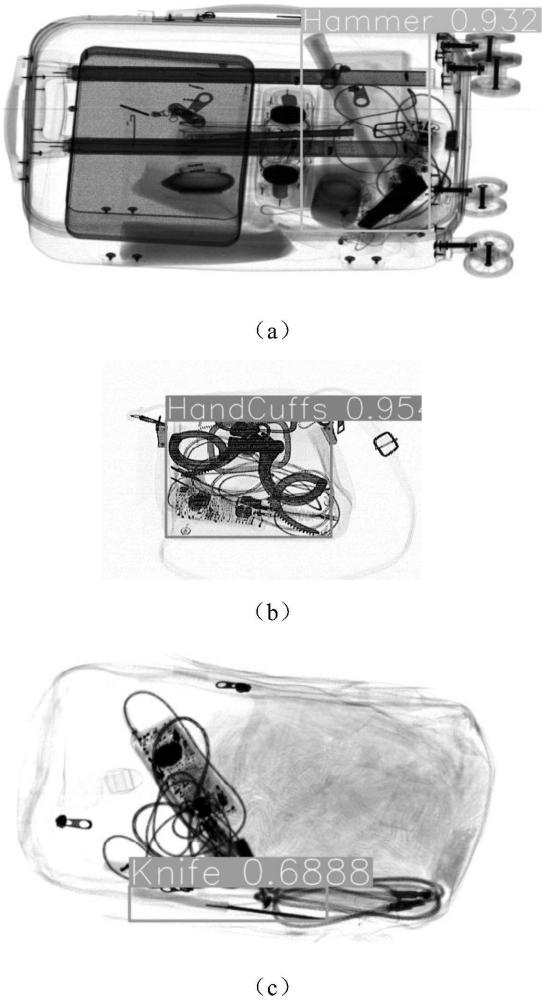
32、进一步地,本发明中,步骤四中,利用测试集对训练好的x射线安检图像检测模型进行测试。将测试集输入x射线安检图像检测模型进行危险品检测,为了进一步提升对行李中物品堆叠造成遮挡的危险品的检测精度,检测时使用nms非极大值抑制方法对冗余预测框进行筛选,消除重叠的边界框或其他类型区域,得到包含危险品图像的位置信息和类别信息。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339756.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。