适用于车速变化的CDC半主动悬架异步观测器设计方法
- 国知局
- 2024-12-06 12:19:08
本发明涉及半主动悬架状态估计,具体是适用于车速变化的cdc半主动悬架异步观测器设计方法。
背景技术:
1、实际工程中,由于成本考虑和安装限制,悬架系统可用的测量信号通常只包括悬架位移、簧上和簧下质量的加速度,获取关于车身和轮胎速度、悬架位移速度和动态轮胎力的数据通常是不切实际的。因此,使用估计技术从可测量数据中推导出必要的系统状态,从而为悬架系统提供准确可靠的状态估计变得至关重要。
2、对于半主动悬架观测器设计,忽略阻尼器的显著非线性力特性可能会严重降低估计质量。在一些研究中采用扩展卡尔曼滤波器(ekf)和无迹卡尔曼滤波器(ukf)进行观测器的设计,这些方法假设系统的噪声和概率密度函数遵循高斯分布,这在实际系统中并不总是成立。还有一些研究将阻尼力视为虚拟控制变量,使得非线性半主动悬架系统可以近似为线性系统进行观测器设计,但在半主动悬架中获取阻尼力通常依赖诸如悬架速度之类的信号,这些信号不能直接从传感器中获得。此外,使用神经网络方法的观测器提供了一种独立于模型依赖性的替代方法,但其准确性取决于大量训练数据的获取,这些训练数据可能并不总是容易获得。
3、综上而言,由于实际车辆行驶条件的复杂性和速度的可变性,开发能够适应车速变化的车辆悬架状态估计方法具有重要的工程意义。
技术实现思路
1、为解决背景技术存在的不足,本发明提供适用于车速变化的cdc半主动悬架异步观测器设计方法,其基于工程中常见的双加速度计传感器配置,在充分考虑cdc阻尼器的非线性特性基础上,能够更稳定精确地估计悬架系统的振动状态。
2、为实现上述目的,本发明采取下述技术方案:适用于车速变化的cdc半主动悬架异步观测器设计方法,包括以下步骤:
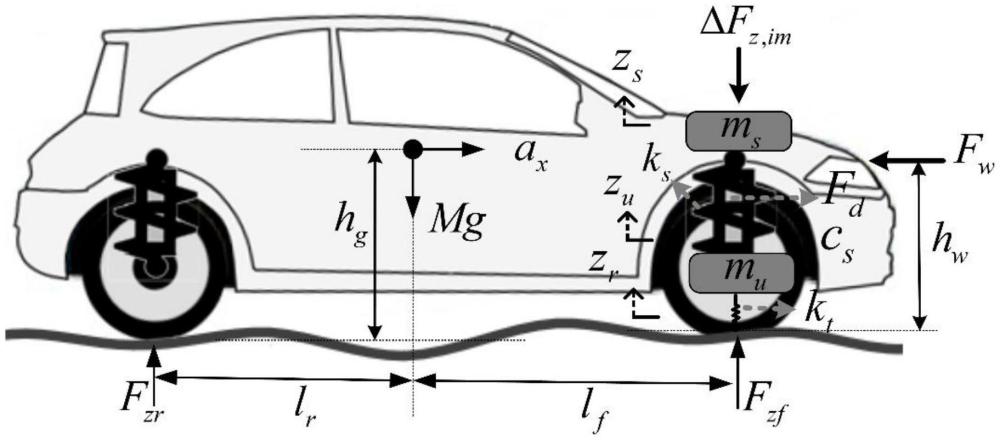
3、步骤一:将车辆非匀速行驶对悬架系统产生的附加动态力作为悬架系统的外部输入;
4、对车辆前后轮胎接地点处取力矩平衡,得到当前时刻前后轴的垂向载荷表达式,分别通过与前轴名义载荷和后轴名义载荷作差得到不同车辆纵向加速度ax下的各悬架处的载荷转移量其中,右上标i=f,r分别代表前轴和后轴,m=l,r分别代表左侧悬架和右侧悬架;
5、步骤二:采用悬架伸缩速度作为切换信号,给出悬架系统的分段模型来描述cdc阻尼器的非线性行为以及在压缩和回弹行程中的阻尼力不对称性的现象;
6、采用悬架伸缩速度作为切换信号,将cdc阻尼器的外特性进行三段式划分:其中rα代表悬架系统当前处在第α个分区,α=1,2,3为系统分区索引,fd为cdc阻尼器的阻尼力:
7、对于α=1,3,
8、对于α=2,
9、其中,i为阻尼器的驱动电流,bα、cα、dα、eα、fα、gα、hα、pα为辨识得到的参数;
10、将附加动态力模型作为悬架系统的外部输入,得到考虑附加动态力的四分之一cdc半主动悬架动力学模型,选取系统状态量系统扰动控制量u=ides,其中,zs和zu分别簧载质量和非簧载质量的垂向位移,zr为路面输入的高程信息,ides为控制输入,建立分段非线性cdc半主动悬架模型如下:
11、
12、其中,
13、
14、b1=[0 0 1 0 0]t,
15、jα(i)=fαi2+gαi+hα,fα(i)=cs+bαi3+cαi2+dαi+eα
16、式中,ms为悬架簧载质量,mu为悬架非簧载质量,ks为弹簧刚度,kt为轮胎垂向刚度,d为时间常数;
17、步骤三:对分段非线性cdc半主动悬架模型进行t-s模糊化处理;
18、选取zα,1=fα(i)和zα,2=jα(i)为前件变量,分段非线性cdc半主动悬架模型由如下切换t-s模型进行表征:
19、
20、式中,ξα为悬架系统第α个分区中的t-s子系统数,δα(x)为悬架系统的切换信号,hαj(z)为悬架系统第α个分区中第j个t-s子系统的权重,aαj为悬架系统第α个分区中第j个t-s子系统的系数矩阵;
21、步骤四:根据车载加速度传感器数据换算获取悬架伸缩速度信号,设计异步观测器,保证因悬架伸缩速度信号获取误差导致观测器与悬架系统处于不同分区时的估计稳定性与输出精度;
22、悬架系统的测量输出方程为:
23、
24、其中,
25、则测量输出经t-s模糊化后表示如下:
26、
27、式中,cαj为悬架系统第α个分区中第j个t-s子系统的输出矩阵;
28、将悬架系统离散化为:
29、
30、
31、将异步观测器设计为:
32、
33、式中,为观测器的切换信号,为观测器分区索引,为观测器第个分区中第p个t-s子观测器的权重,为观测器第个分区中第p个t-s子系统的系数矩阵,为观测器第个分区中第p个t-s子系统的输出矩阵,为观测器估计值,为观测器输出值,代表观测器当前处在第个分区,为观测器第个分区中的t-s子观测器数,为观测器增益;
34、定义ω为悬架系统所有可能的状态切换对集合,ω={(α,β)|xk∈rα,xk+1∈rβ},rβ代表悬架系统下一刻处在第β个分区,β=1,2,3;定义为观测器所有可能的状态切换对集合,代表观测器下一刻处在第个分区,
35、定义观测器误差为有:
36、
37、式中,为观测器第个分区中第s个t-s子观测器的输出矩阵;
38、定义有:
39、
40、其中,
41、当α=1,3时,悬架系统的定义域为:
42、
43、当时,观测器的定义域为:
44、
45、其中,
46、异步观测器的设计目标为设计若存在矩阵以及标量r>0,使得以下优化问题有解:
47、min r
48、情形1、α=1,3,
49、
50、其中,
51、
52、
53、
54、
55、
56、
57、
58、
59、
60、情形2、α=2,
61、将情形1不等式中g14、g22、g24和g44中的fα、aα和dα置0;
62、情形3、α=1,3,
63、将情形1不等式中g14、g22、g24和g44中的和置0;
64、情形4、α=2,
65、
66、则观测器增益表示为
67、进一步的,所述步骤一中当前时刻前后轴的垂向载荷表达式如下:
68、
69、式中,表示前轴的垂向载荷,表示后轴的垂向载荷,m表示车辆质量,g表示重力加速度,lf和lr分别表示重心到前后轴的距离,hg表示重心高度,fw表示风阻,hw表示等效的风阻作用点高度。
70、进一步的,所述步骤二中考虑附加动态力的四分之一cdc半主动悬架动力学模型为:
71、
72、
73、
74、式中,cs为被动阻尼系数。
75、进一步的,所述步骤三中前件变量zα,1和zα,2分别表示为:
76、
77、其中,mα,1和mα,2以及nα,1和nα,2为隶属函数,定义如下:
78、
79、
80、式中,和分别为zα,1的最大值和最小值,和分别为zα,2的最大值和最小值。
81、进一步的,所述步骤四中异步观测器的设计目标应使得同时外部扰动到zk的增益满足:
82、
83、其中,r为到zk的l2增益。
84、与现有技术相比,本发明的有益效果是:
85、1、本发明异步观测器适用于车辆匀速和非匀速工况下的悬架振动状态估计问题,扩大了观测器的工况适用性;
86、2、本发明异步观测器的设计考虑了cdc阻尼器的非线性特性,能够在悬架伸缩速度信号获取不准确的前提下,保证观测器的估计稳定性与输出精度。
本文地址:https://www.jishuxx.com/zhuanli/20241204/340589.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。