检测光加压电反射镜与位置探测器模块实现光路指向闭环方法
- 国知局
- 2024-12-06 12:29:03
本发明涉及serf耦合磁强计,具体涉及一种检测光加压电反射镜与位置探测器模块实现光路指向闭环方法。这种方法通过调整加压电反射镜的角度,就可改变光束击中位置探测器所处的三维坐标位置,最终达到检测光路与抽运光路正交,也就是抽运光路与检测光路垂直。通过这种方法不仅可以将检测光打到气室的正中心,并且气室的正中心是最佳点,而且可以在抽运光束已经打到气室最佳点的情况下,通过调整检测光路的加压电反射镜可以实现抽运光路与检测光路正交。
背景技术:
1、serf惯性测量(采用serf耦合磁强计,serf是无自旋交换弛豫,spin-exchangerelaxation-free)通过测量外界转动引起的电子自旋极化的变化敏感角速度,因其原子自旋系综对外界磁场的变化具有自补偿能力,具有了极高的测量精度和稳定性。检测系统作为整个serf惯性测量系统的输出端,其性能与整个系统的性能直接相关。检测系统以测量电子自旋极化为目的,因此serf惯性测量系统的稳定性与电子自旋极化的稳定性息息相关。原子自旋极化的稳定性在纵向上与抽运光功率有关,在横向上受检测光功率的影响。检测光的非理想线偏振直接作用于电子自旋,引起的检测光抽运效应成为制约系统灵敏度和稳定性提升的重要因素之一,因此抽运与检测光的正交制约着系统灵敏度的提升。有鉴于此,本发明人完成了本发明。
技术实现思路
1、本发明针对现有技术的缺陷或不足,提供一种检测光加压电反射镜与位置探测器模块实现光路指向闭环方法。加压电反射镜用于调整光束的角度,并通过位置探测检测光束的位置来验证角度调整的正确性。这种方法通过调整加压电反射镜的角度,就可改变光束击中位置探测器所处的三维坐标位置,最终达到检测光路与抽运光路正交,也就是抽运光路与检测光路垂直。通过这种方法不仅可以将检测光打到气室的正中心,并且气室的正中心是最佳点,而且可以在抽运光束已经打到气室最佳点的情况下,通过调整检测光路的加压电反射镜可以实现抽运光路与检测光路正交。
2、本发明技术解决方案如下:
3、检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,包括以下步骤:
4、步骤1,在serf耦合磁强计系统中气室的检测光入射侧设置加压电反射镜,在气室的检测光出射侧设置分光棱镜,所述分光棱镜的反射侧连接位置探测器,所述位置探测器通过第一电控连接所述加压电反射镜的光路指向调控端,所述加压电反射镜将反射检测光依次通过透镜、准直透镜和气室后进入所述分光棱镜,所述分光棱镜的透射侧通过第三λ/2片连接第二偏振分光棱镜,所述第二偏振分光棱镜的反射侧通过第二光电探测器连接差分电路的第一输入端,所述第二偏振分光棱镜的透射侧通过第三光电探测器连接差分电路的第二输入端,差分电路的输出端用于serf耦合磁强计信号输出;
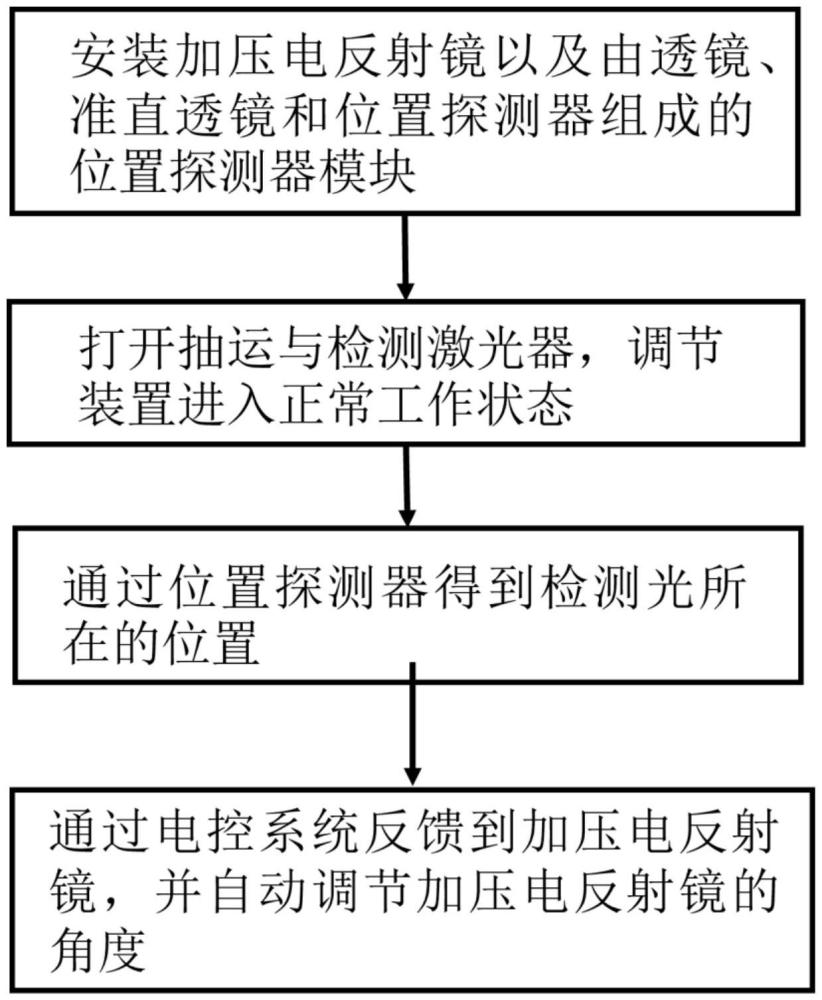
5、步骤2,打开serf耦合磁强计系统中的抽运激光器和检测激光器,调节serf耦合磁强计系统进入正常工作状态;
6、步骤3,通过所述位置探测器得到检测光所在的位置,所述第一电控根据检测光的光束位置调节所述加压电反射镜的角度,使检测光打到气室正中心,并使检测光与抽运光在气室正中心正交。
7、所述检测光逆y轴穿过气室,所述抽运光顺x轴穿过气室。
8、所述气室位于烤箱内,所述烤箱位于铁氧体内,所述铁氧体位于第二层坡莫合金内,所述第二层坡莫合金位于第一层坡莫合金内。
9、所述抽运激光器依次连接第三格兰棱镜、第二液晶相位延迟器、第四格兰棱镜、第四λ/2片、第三偏振分光棱镜、第五λ/2片、反射镜和气室,所述第三偏振分光棱镜依次通过第四光电探测器和第二电控连接所述第二液晶相位延迟器,所述检测激光器依次连接第一λ/2片、第一格兰棱镜、第一液晶相位延迟器、第二格兰棱镜、第二λ/2片、第一偏振分光棱镜和所述加压电反射镜,所述第一偏振分光棱镜依次通过第一光电探测器和第三电控连接所述第一液晶相位延迟器。
10、步骤3中包括以下公式:
11、
12、mtot=md(d3)mf(f2,x2)md(d2)mf(f1,x1)md(d1)
13、式中x是在没有任何透镜的情况下由光束形成的偏移气室正中心的距离,称为偏移量;θ是光束相对于气室中心轴的角度;θ0是光传播角度与气室中心轴的初始角度;x0是偏移气室正中心的初始距离;mtot是总变换矩阵;md是矩阵计算,来计算光的传播距离;md(d3)是关于d3的矩阵计算;md(d2)是关于d2的矩阵计算;md(d1)是关于d1的矩阵计算;d1是加压电反射镜与透镜的距离;f1是透镜的焦距,d2是透镜与准直透镜的距离,f2是准直透镜的焦距;d3是准直透镜与气室的距离;mf是矩阵计算,x1是透镜条件下偏移量,x2是准直透镜条件下偏移量。
14、步骤3中包括以下公式:
15、
16、其中md(d)是关于d的矩阵计算,d是光束路径长度,mf(f,x)是关于f和x的矩阵计算,f是透镜焦距,x是透镜偏移量。
17、步骤3中包括以下公式:
18、
19、d2=f1+f2
20、dtot=d1+d2+d3
21、其中dtot是光束路径总长度。
22、本发明的技术效果如下:本发明检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,通过位置探测器得到检测光所在的三维位置,并反馈到加压电反射镜。加压电反射镜用于调整光束的角度,并通过位置探测器检测光束的位置来验证角度调整的正确性。这种方法不仅对找到光束通过气室的中心点很重要,而且可以在不改变抽运光束方向的情况下实现抽运-检测光束正交。
23、本发明与现有技术相比的优点在于:本文提出了一种检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,该方法通过位置探测器得到检测光所在的位置,并反馈到加压电反射镜,并自主调节加压电反射镜的角度,从而找到光通过气室的最佳点,并使抽运与检测正交。
技术特征:1.检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,所述检测光逆y轴穿过气室,所述抽运光顺x轴穿过气室。
3.根据权利要求1所述的检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,所述气室位于烤箱内,所述烤箱位于铁氧体内,所述铁氧体位于第二层坡莫合金内,所述第二层坡莫合金位于第一层坡莫合金内。
4.根据权利要求1所述的检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,所述抽运激光器依次连接第三格兰棱镜、第二液晶相位延迟器、第四格兰棱镜、第四λ/2片、第三偏振分光棱镜、第五λ/2片、反射镜和气室,所述第三偏振分光棱镜依次通过第四光电探测器和第二电控连接所述第二液晶相位延迟器,所述检测激光器依次连接第一λ/2片、第一格兰棱镜、第一液晶相位延迟器、第二格兰棱镜、第二λ/2片、第一偏振分光棱镜和所述加压电反射镜,所述第一偏振分光棱镜依次通过第一光电探测器和第三电控连接所述第一液晶相位延迟器。
5.根据权利要求1所述的检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,步骤3中包括以下公式:
6.根据权利要求1所述的检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,步骤3中包括以下公式:
7.根据权利要求1所述的检测光加压电反射镜与位置探测器模块实现光路指向闭环方法,其特征在于,步骤3中包括以下公式:
技术总结一种检测光加压电反射镜与位置探测器模块实现光路指向闭环方法。这种方法通过加压电反射镜用于调整光束的角度,并通过位置探测检测光束的位置来验证角度调整的正确性,能够改变光束击中位置探测器所处的三维坐标位置,最终达到检测光路与抽运光路正交,也就是抽运光路与检测光路垂直。通过这种方法不仅可以将检测光打到气室的正中心,并且气室的正中心是最佳点,而且可以在抽运光束已经打到气室最佳点的情况下,通过调整检测光路的加压电反射镜可以实现抽运光路与检测光路正交。技术研发人员:全伟,秦博东,夏浩,范文峰受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/341654.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。