秸秆捆包收集机的机械臂控制系统的制作方法
- 国知局
- 2024-12-06 12:47:10
本发明涉及农业机械,尤其涉及秸秆捆包收集机的机械臂控制系统。
背景技术:
1、随着农业机械化的快速发展,秸秆捆包收集机在农业生产中得到了广泛应用。秸秆捆包收集机能够有效地将散落的秸秆进行捆扎和搬运,提高了农业废弃物的处理效率。然而,传统的秸秆捆包收集机主要依赖人工操作,不仅劳动强度大,而且操作精度低,难以适应复杂多变的工作环境。为了提高秸秆捆包收集机的自动化水平,减少人工干预,机械臂控制系统逐渐成为研究的热点。机械臂控制系统通过多种传感器实时监测操作状态,并结合智能控制算法实现高精度的捆包、搬运和装载操作,从而提高了生产效率和操作安全性。
2、现有技术中的机械臂控制系统在实际应用中仍存在一些技术问题,主要体现在以下几个方面。首先,传统的控制系统对操作状态的监测和反馈不够及时,无法实现实时的动态调整,导致操作精度和稳定性难以保证。其次,现有的控制算法大多固定,缺乏自适应能力,无法根据不同的操作环境和任务需求进行灵活调整,影响了系统的适用性和可靠性。此外,现有系统缺乏有效的力反馈机制,无法实时监测和调整机械臂的操作力度,导致操作过程中的精确性和安全性难以保障。
技术实现思路
1、基于上述目的,本发明提供了秸秆捆包收集机的机械臂控制系统。
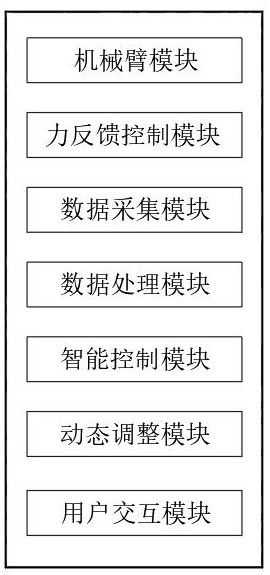
2、秸秆捆包收集机的机械臂控制系统,包括机械臂模块、力反馈控制模块、数据采集模块、数据处理模块、智能控制模块、动态调整模块和用户交互模块,其中;
3、所述机械臂模块安装在秸秆捆包收集机上,所述机械臂模块配置有末端执行器用于实现机械臂的多种操作,包括捆包、搬运和装载;
4、所述力反馈控制模块用于实时监测机械臂的操作力度,并将监测的力反馈数据发送至智能控制模块;
5、所述数据采集模块用于采集机械臂的操作状态数据,包括位置、速度和加速度数据;
6、所述数据处理模块用于处理力反馈控制模块传输的力反馈数据和数据采集模块采集的操作状态数据;
7、所述智能控制模块与数据处理模块连接,用于接收处理后的力反馈数据和操作状态数据,基于预设的控制算法生成机械臂的操作指令;
8、所述动态调整模块与数据处理模块连接,用于根据实时力反馈数据和操作状态数据,动态调整机械臂的操作参数,以确保操作的精确性和稳定性;
9、所述用户交互模块用于用户与系统之间的信息交流,提供操作界面和反馈信息。
10、进一步的,所述力反馈控制模块包括力传感器和数据传输单元,其中;
11、所述力传感器为mems力传感器,安装在机械臂的关键关节和末端执行器位置,实时测量机械臂在操作过程中施加的力,并将其转换为电信号输出;
12、所述数据传输单元将电信号传输至数据处理模块。
13、进一步的,所述数据采集模块具体包括:
14、位置传感器:用于测量机械臂各个关节的角度位置和末端执行器的线性位置,位置传感器安装于机械臂各个关节和直线运动部件;
15、速度传感器:用于测量机械臂各个关节的转速和末端执行器的线速度,速度传感器与位置传感器集成在一起;
16、加速度传感器:用于测量机械臂在操作过程中各个部件的加速度,加速度传感器安装在机械臂的关键位置,如关节或末端执行器。
17、进一步的,所述数据处理模块接收力反馈控制模块传输的力反馈数据和数据采集模块采集的操作状态数据,所述数据处理模块配置有信号处理单元,用于对接收的数据进行处理;
18、所述信号处理单元包括放大器、滤波器和模数转换器,所述放大器用于放大传感器输出的微弱电信号,所述滤波器用于去除电信号中的噪声,确保数据的准确性,所述模数转换器用于将放大和滤波后的电信号转换为数字信号。
19、进一步的,所述智能控制模块包括中央处理单元、数据接口、控制算法库和通信接口,所述中央处理单元用于处理输入的数据并执行控制算法,所述数据接口用于接收来自力反馈控制模块和数据采集模块的输入数据,所述控制算法库用于存储和管理用于机械臂控制的各种算法,包括位置控制算法、速度控制算法、力控制算法和路径规划算法,所述通信接口用于将生成的操作指令发送到机械臂模块。
20、进一步的,所述智能控制模块具体包括:
21、数据接收:通过数据接口接收来自力反馈控制模块的实时力反馈数据和数据采集模块采集的操作状态数据;
22、数据融合:使用粒子滤波算法将力反馈数据和操作状态数据进行融合,形成综合的状态信息;
23、控制算法执行:根据当前位置和目标位置,通过pid控制算法计算机械臂需要移动的距离和方向;
24、根据当前速度和目标速度,通过pid速度控制算法,调整机械臂的运动速度;
25、根据力反馈数据,通过阻抗控制算法调整机械臂施加的力;
26、根据目标任务,通过路径规划算法,规划机械臂的最优路径;
27、操作指令生成:结合位置、速度和力控制的结果,生成具体的操作指令,操作指令包括位置、速度和力度的调整参数;
28、指令发送:通过通信接口,将生成的操作指令发送到机械臂模块。
29、进一步的,所述动态调整模块包括自适应控制算法单元和执行指令生成单元,所述自适应控制算法单元基于预设的自适应控制算法,动态调整机械臂的操作参数,所述执行指令生成单元用于生成具体的操作参数调整指令。
30、进一步的,所述动态调整模块具体包括:
31、实时数据接收:实时接收数据处理模块处理后的力反馈数据和操作状态数据;
32、数据融合:使用扩展卡尔曼滤波算法将处理后的力反馈数据和操作状态数据进行融合;
33、自适应控制算法执行:自适应控制算法单元基于预设的自适应控制算法,动态调整机械臂的操作参数;
34、指令生成:基于自适应控制算法计算结果,执行指令生成单元生成具体的操作参数调整指令,并将参数调整指令发送至机械臂模块,调整机械臂的操作参数。
35、进一步的,所述用户交互模块配置有触摸屏,所述触摸屏提供直观的操作界面,允许用户通过触摸屏进行直接操作和设置。
36、进一步的,所述用户交互模块设有远程监控接口,允许用户通过远程设备(如电脑、平板或手机)监控和控制机械臂的操作。
37、本发明的有益效果:
38、本发明通过集成力反馈控制模块和数据采集模块,实时监测机械臂的操作状态,包括位置、速度和力反馈数据。智能控制模块利用这些数据,通过预设的控制算法生成操作指令,实现对机械臂的高精度控制。此外,动态调整模块根据实时力反馈数据和操作状态数据,动态调整机械臂的操作参数,确保操作过程中的精确性和稳定性。通过这些技术手段,机械臂能够在各种复杂工作环境中保持稳定的操作,避免因环境变化或任务复杂度增加而导致的操作失误或效率降低,从而大大提高了生产效率和操作安全性。
39、本发明的动态调整模块采用自适应控制算法,能够根据不同的操作环境和任务需求进行灵活调整。自适应力控制算法、自适应速度控制算法和自适应路径规划算法的应用,使系统能够根据实时监测数据自动调整操作参数,适应不同的操作条件。这样不仅提高了系统的灵活性和适用性,还大大增强了系统的可靠性,确保机械臂在各种工作条件下都能高效运行。
40、本发明通过集成力反馈控制模块,实时监测机械臂在操作过程中的施加力度,并将监测数据发送至智能控制模块。力反馈控制模块不仅能够检测机械臂在捆包、搬运和装载操作中的力变化,还能实时调整施加的力度,防止因操作力度过大导致的设备损坏或因力度不足导致的捆包不牢固问题。力反馈数据的实时监测和反馈,使智能控制模块能够快速响应力变化,进行动态调整,确保机械臂在操作过程中的稳定性和安全性。通过力反馈控制模块的应用,系统能够在复杂多变的操作环境中保持高精度和高可靠性的操作,进一步提升了机械臂的工作效率和安全性,减少了因操作误差导致的故障和停机时间。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342763.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表