一种摆刀地面前置仿形机构的制作方法
- 国知局
- 2024-12-26 16:07:49
本技术涉及农业收割装备,尤其涉及一种摆刀地面前置仿形机构。
背景技术:
1、传统的绿叶菜收割作业一般是通过人工手持刀具进行作业,劳动强度大,劳动力需求较多,工作效率低下。现有的收割机一定程度上取代了传统的人工作业,减轻了劳动强度,提高了工作效率。当收割机利用进行左右摆动的摆刀对其前方的绿叶菜进行收割的过程中,畦面的高低起伏会影响绿叶菜的收割品质,无法保证被摆刀切割的绿叶菜茬口达到一致。
2、在现有技术中,公告号cn107223401b的中国发明专利曾公开了一种自走式电动绿叶菜收割机。该收割机的地面仿形机构向收割机反馈的信息仅为刀具后方的畦面的起伏情况,收割机无法根据该地面仿形机构反馈的信息提前预知刀具前方畦面的起伏情况,进而无法保证被切割叶菜茬口达到一致,影响叶菜收获质量。
3、综上所述,对于配备有摆刀的收割机,现有的地面仿形机构无法满足收割机提前预知摆刀前方畦面的起伏情况的需求。
技术实现思路
1、本实用新型的目的在于提供一种摆刀地面前置仿形机构,实现对摆刀前方畦面的仿形,并提前预知摆刀前方畦面的起伏情况,以使摆刀与畦面始终处于收割高度,保证收割作业质量。
2、本实用新型的目的可以通过以下技术方案实现:
3、一种摆刀地面前置仿形机构,应用于配备有摆刀切割装置的收割机上,所述摆刀切割装置包括装配在支撑架上的摆刀和用于驱动所述摆刀进行左右摆动的驱动机构;
4、所述摆刀地面前置仿形机构包括呈左右对称分布的两仿形组件,两所述仿形组件通过同一支撑管安装在所述支撑架上;所述仿形组件包括装配在所述支撑管上的触杆支架、上端铰接在所述触杆支架上的触杆以及安装在所述触杆支架上的角度传感器;所述触杆的中部通过连杆机构与所述角度传感器的输入转轴连接,所述触杆的下端设有用于接触所述摆刀前方的畦面的接触端。
5、通过两仿形组件向收割机实时反馈摆刀前方畦面的起伏情况,以使收割机可提前预知摆刀前方畦面的起伏情况,进而使被摆刀切割的绿叶菜茬口达到一致,保证绿叶菜的收割品质。
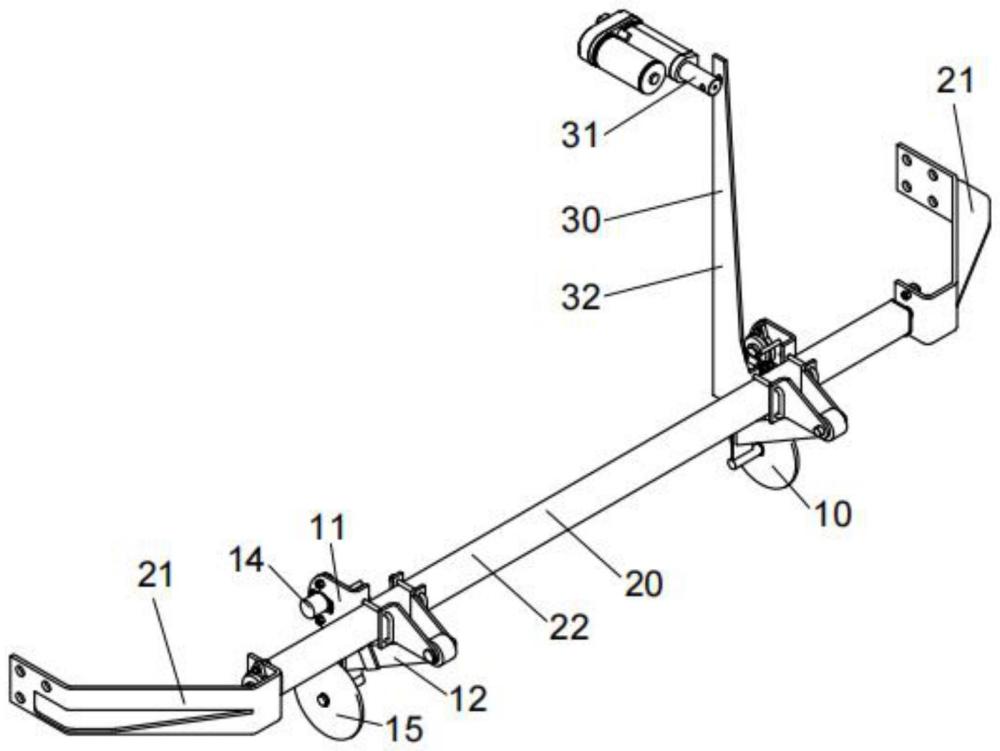
6、作为本实用新型进一步的方案,所述支撑管沿左右方向延伸,且其左、右两端可转动地架设在所述支撑架上,所述支撑管与所述支撑架之间连接有用于驱动所述支撑管进行转动的微调装置。采用上述方案,通过微调装置对两仿形组件的位置同步进行微调,以使仿形组件的底部靠近摆刀前方的畦面。
7、作为本实用新型进一步的方案,所述微调装置包括固定在所述支撑架上的电动推杆;所述电动推杆的驱动端通过连接杆驱动所述支撑管转动。采用上述方案,有效驱动支撑管进行转动,进而实现对仿形组件位置的微调。
8、作为本实用新型进一步的方案,所述触杆支架由u型螺栓、触杆支座以及传感器支座构成;所述触杆支座置于所述矩形管前侧,所述传感器支座置于所述矩形管后侧,所述触杆支座、所述传感器支座和所述矩形管之间通过所述u型螺栓固定连接。采用上述方案,以使触杆支架装配在支撑管上。
9、作为本实用新型进一步的方案,所述支撑管为横截面为矩形的矩形管。采用上述方案,以便触杆支架装配在支撑管上。此外,由于矩形管横截面的对角线的长度大于矩形管的宽度、高度,故相较于圆形管,矩形管可增大微调装置的微调幅度。
10、作为本实用新型进一步的方案,所述连杆机构由第一连杆和第二连杆组成,所述第一连杆为长度可调的连杆;所述第一连杆的一端铰接于所述触杆的中部,其另一端铰接于所述第二连杆的一端,所述第二连杆的另一端与所述角度传感器的输入转轴固定连接。采用上述方案,通过调整第一连杆的长度可实现对接触端位置的微调。
11、作为本实用新型进一步的方案,所述触杆支架与所述触杆之间设有压簧。采用上述方案,在压簧的作用下,以使仿形组件的底部始终与摆刀前方的畦面相接触。
12、作为本实用新型进一步的方案,所述触杆支架上设有用于限制所述连杆机构运动的限位柱。采用上述方案,通过限制连杆机构运动,进而间接限制角度传感器输入转轴的转动范围,防止输入转轴进行转动的角度超过角度传感器的量程,进而提高仿形组件仿形作业的稳定性。
13、作为本实用新型进一步的方案,所述触杆的自由端通过仿形轮与畦面相接触。采用上述方案,以使畦面仿形装置与畦面之间的接触更顺滑。
14、作为本实用新型进一步的方案,所述角度传感器与所述收割机的控制器电连接;所述控制器根据所述角度传感器反馈的信号控制相应的液压油缸对所述摆刀切割装置的左右两侧进行升降调整。采用上述方案,在保证收割高度的前提下,仿形组件可根据畦面平整和地表高度变化,调节液压油缸,保持摆刀相对畦面水平,进而使被切割绿叶菜茬口达到一致,进而保证绿叶菜的收割品质。
15、本实用新型的有益效果:
16、通过两仿形组件向收割机实时反馈摆刀前方畦面的起伏情况,以使收割机可提前预知摆刀前方的畦面的起伏情况;
17、在保证收割高度的前提下,仿形组件可根据畦面平整和地表高度变化,调节液压油缸,保持摆刀相对畦面水平,进而使被切割绿叶菜茬口达到一致,进而保证绿叶菜的收割品质;
18、在收割机进行收割前,通过微调装置和第一连杆的配合,以使两仿形组件的底部可以刚好贴合于摆刀前方的畦面,以适应不同品种、生长密度绿叶菜的收获;
19、在收割机进行收割时,通过压簧的作用以使仿形组件的底部始终与摆刀前方的畦面相接触。
技术特征:1.一种摆刀地面前置仿形机构,应用于配备有摆刀切割装置(50)的收割机上,所述摆刀切割装置(50)包括装配在支撑架(51)上的摆刀(52)和用于驱动所述摆刀(52)进行左右摆动的驱动机构,其特征在于:
2.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述支撑管(22)沿左右方向延伸,且其左、右两端可转动地架设在所述支撑架(51)上,所述支撑管(22)与所述支撑架(51)之间连接有用于驱动所述支撑管(22)进行转动的微调装置(30)。
3.根据权利要求2所述的摆刀地面前置仿形机构,其特征在于,所述微调装置(30)包括固定在所述支撑架(51)上的电动推杆(31);所述电动推杆(31)的驱动端通过连接杆(32)驱动所述支撑管(22)进行转动。
4.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述触杆支架(11)由u型螺栓(111)、触杆支座(112)以及传感器支座(113)构成;所述触杆支座(112)置于所述支撑管(22)前侧,所述传感器支座(113)置于所述支撑管(22)后侧,所述触杆支座(112)、所述传感器支座(113)和所述支撑管(22)之间通过所述u型螺栓(111)固定连接。
5.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述支撑管(22)为横截面为矩形的矩形管。
6.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述连杆机构(13)由第一连杆(131)和第二连杆(132)组成,所述第一连杆(131)为长度可调的连杆;所述第一连杆(131)的一端铰接于所述触杆(12)的中部,其另一端铰接于所述第二连杆(132)的一端,所述第二连杆(132)的另一端与所述角度传感器(14)的输入转轴固定连接。
7.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述触杆支架(11)与所述触杆(12)之间设有压簧(17)。
8.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述触杆支架(11)上设有用于限制所述连杆机构(13)运动的限位柱(16)。
9.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述触杆(12)的自由端通过仿形轮(15)与畦面相接触。
10.根据权利要求1所述的摆刀地面前置仿形机构,其特征在于,所述角度传感器(14)与所述收割机的控制器电连接;所述控制器根据所述角度传感器(14)反馈的信号控制相应的液压油缸(41)对所述摆刀切割装置(50)的左右两侧进行升降调整。
技术总结本技术公开了一种摆刀地面前置仿形机构,应用于配备有摆刀切割装置的收割机上,摆刀切割装置包括装配在支撑架上的摆刀和用于驱动摆刀进行左右摆动的驱动机构;摆刀地面前置仿形机构包括呈左右对称分布的两仿形组件,两仿形组件通过支撑管安装在支撑架上;仿形组件包括装配在支撑管上的触杆支架、上端铰接在触杆支架上的触杆以及安装在触杆支架上的角度传感器;触杆的中部通过连杆机构与角度传感器的输入转轴连接,触杆的下端设有用于接触摆刀前方畦面的接触端。本技术通过两仿形组件向收割机实时反馈摆刀前方畦面的起伏情况,以使收割机可提前预知摆刀前方畦面的起伏情况,以使被摆刀切割的绿叶菜茬口达到一致,保证绿叶菜的收割品质。技术研发人员:周春健,黄嘉俊,俞志轩,范涛,成松松,唐宁静受保护的技术使用者:上海市农业机械研究所技术研发日:20240412技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/348280.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种喂料槽的制作方法
下一篇
返回列表