一种基于卫星定位和激光雷达定位的物料运输系统的制作方法
- 国知局
- 2024-12-26 14:50:23
本技术涉及固体废弃物处理,特别涉及一种基于卫星定位和激光雷达定位的物料运输系统。
背景技术:
1、对于固体废弃物处理行业,所涉及的固体物料来源广泛,一般需要通过粉碎预处理进行后续的运输及处理,常规物料通过锤片式破碎机或者对辊式破碎机进行粉碎得到,物料的外观尺寸不均匀,物料自身的含水量相对较高,物料之间容易相互粘连,针对较为经济的固体废弃物处理规模,粉碎后的物料的短途转运一般在100~1000米。
2、对于该种情形下的中短途固体物料倒运,常规的皮带输送、板链输送、螺旋输送等固体物料输送的长距离设备投资较高,并且运行能耗随着距离明显增加,由于含水率较高固体废弃物,容易粘附在输送设备中,因此通过中转运输车进行物料的场内倒运是较为经济、灵活的运输方式,在实际工程实施过程中,由于运输车驾驶员操作可根据实际情况实时处理各种紧急情况,并且通过反复调整车辆位置,以确保运输车辆和后续工艺的对接,保证工程运行的连续性。
3、针对距离较长的固体物料运输,通常采用皮带输送、板链输送、螺旋输送等,如公开号为cn212221507u的一种渣灰自动化运输系统,提到了利用多级灰渣输送带进行灰渣的自动化运输,公开号为cn109250411a的一种电极自动化运输系统,采用了运输小车进行电极的自动化运输,小车通过轨道通过检测机构检测运输小车在运输轨道上的位置,控制装置与运输小车通讯连接,用于控制运输小车沿运输轨道运行,这些自动化输送装置都是在既定轨迹上,通过声、光等传感器进行固体物料的定位追踪,前后对接通过固定的装置实现;公开号为cn116767283a的一种自适应多变化场景下的汽车自动驾驶系统,针对车辆高速行驶情况下的卫星定位及感知系统实现汽车自动驾驶。
4、在上述现有的技术方案中,固体物料转运通过运输车驾驶员开车到达目的地,通过驾驶员控制,实现车辆停止在指定位置,由于驾驶员操作差异,每次停车误差较大,与后续设备的对接通过增加柔性对接或者宽松的对接方式,导致在固体物料卸料过程中容易撒漏,现场脏乱。
技术实现思路
1、本实用新型的目的在于提供一种基于卫星定位和激光雷达定位的物料运输系统,以解决固体物料输送过程中运输车停车定位精度差的问题,采用的技术方案如下:
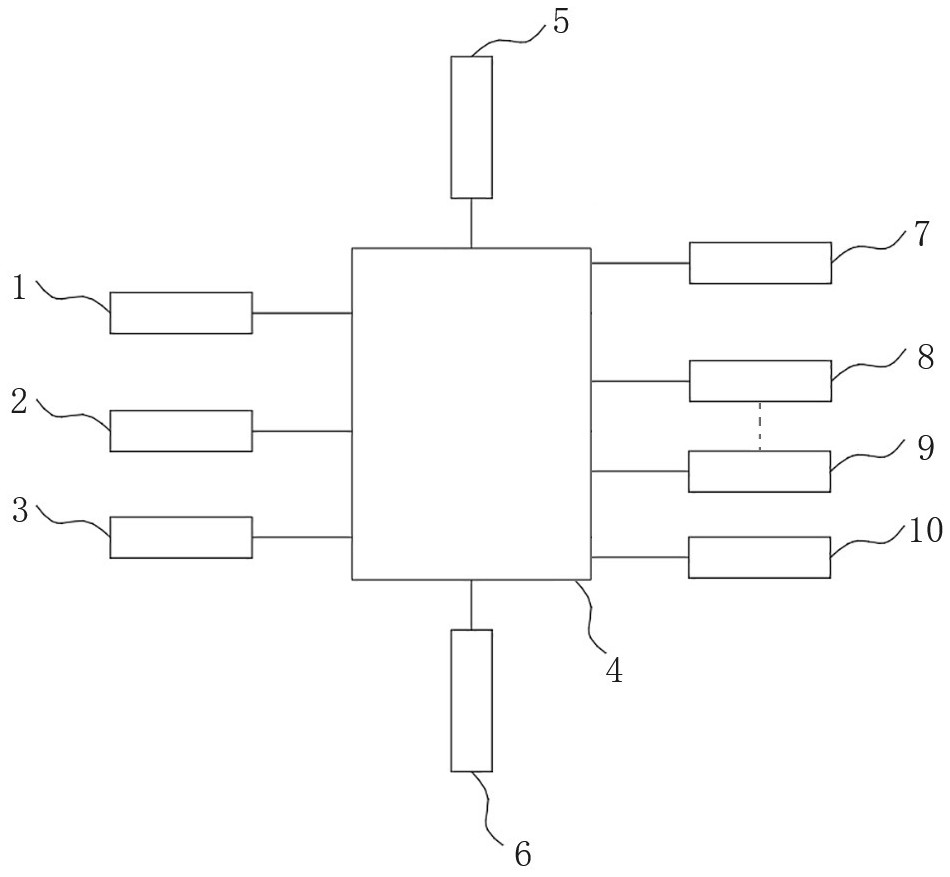
2、一种基于卫星定位和激光雷达定位的物料运输系统,其特征在于,包括:
3、物料运输车;
4、称重模块,设置于物料运输车上,用于对装载物料进行称重;
5、定位模块,包括卫星定位模块和激光定位模块,所述激光定位模块设置于物料运输车上;
6、无线通信模块;
7、控制器,所述称重模块、卫星定位模块以及激光定位模块通过无线通信模块与控制器信号连接;
8、存储模块,所述存储模块内预设有目标位置距离阈值;
9、比较模块,用于将物料运输车当前位置和目的地之间的实时距离与目标位置距离阈值比较,并将比较结果发送至调整模块;
10、调整模块,用于在所述物料运输车当前位置和目的地之间的实时距离大于目标位置距离阈值时,发送控制指令至控制器,控制器根据卫星定位模块输出的位置信号控制物料运输车的行车轨迹,以及用于在所述物料运输车当前位置和目的地之间的实时距离小于目标位置距离阈值时,发送控制指令至控制器,控制器根据激光定位模块输出的位置信号控制物料运输车的行车轨迹。
11、进一步地,所述物料运输车上设置有驱动模块,所述驱动模块通过无线通信模块与控制器信号连接。
12、进一步地,所述存储模块内还预设有装载重量阈值,用于控制器称重模块输出信号大于装载重量阈值时控制器控制驱动模块驱动物料运输车向目标位置行驶。
13、进一步地,还包括报警模块,所述报警模块与控制器信号输出端相连,用于在所述称重模块输出信号大于装载重量阈值时控制器控制报警模块发出警报信息。
14、进一步地,所述激光定位模块由沿物料运输车车身四周均匀布置的多组激光雷达组成。
15、进一步地,所述目标位置距离阈值为3~5m。
16、本实用新型的有益效果在于:当物料运输车距离目标位置大于阈值时,通过卫星定位模块控制物料运输车按照既定行驶路行驶,在物料运输车到达目标位置附近时,基于激光定位模块控制物料运输车行驶,以实现物料运输车的精准停靠,避免后续物料处理过程中出现物料撒漏现象。
技术特征:1.一种基于卫星定位和激光雷达定位的物料运输系统,其特征在于,包括:
2.根据权利要求1所述的基于卫星定位和激光雷达定位的物料运输系统,其特征在于,所述物料运输车上设置有驱动模块,所述驱动模块通过无线通信模块与控制器信号连接。
3.根据权利要求2所述的基于卫星定位和激光雷达定位的物料运输系统,其特征在于,所述存储模块内还预设有装载重量阈值,用于称重模块输出信号大于装载重量阈值时控制器控制驱动模块驱动物料运输车向目标位置行驶。
4.根据权利要求3所述的基于卫星定位和激光雷达定位的物料运输系统,其特征在于,还包括报警模块,所述报警模块与控制器信号输出端相连,用于在所述称重模块输出信号大于装载重量阈值时控制器控制报警模块发出警报信息。
5.根据权利要求1所述的基于卫星定位和激光雷达定位的物料运输系统,其特征在于,所述激光定位模块由沿物料运输车车身四周均匀布置的多组激光雷达组成。
6.根据权利要求1所述的基于卫星定位和激光雷达定位的物料运输系统,其特征在于,所述目标位置距离阈值为3~5m。
技术总结本技术的目的在于提供一种基于卫星定位和激光雷达定位的物料运输系统,以解决固体物料输送过程中运输车停车定位精度差的问题,包括:物料运输车;设置于物料运输车上的称重模块;定位模块,包括卫星定位模块和设置于物料运输车上的激光定位模块;无线通信模块;控制器;存储模块,存储模块内预设有目标位置距离阈值;比较模块,用于将物料运输车当前位置和目的地之间的实时距离与目标位置距离阈值比较,并将比较结果发送至调整模块;调整模块;调整模块根据比较模块比较结果向控制器发送相应控制指令,从而控制运输车在不同情况下基于卫星定位模块或激光定位模块进行引导,从而实现运输车的精确定位。技术研发人员:罗生军,戴萌,刘鹏,战海峰受保护的技术使用者:青岛中科聚能环保科技有限公司技术研发日:20240415技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/343602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表