一种含共轴线驱动关节的并联转运机器人及其运行方法与流程
- 国知局
- 2024-12-26 14:55:34
本发明涉及一种转运机器人,特别涉及一种含共轴线驱动关节的并联转运机器人及其运行方法。
背景技术:
1、转运机器人是现代制造业中不可或缺的自动化智能装备,广泛应用于建筑、石化、食品等行业的物料转运。不仅需要转运机器人具有运动灵活度高、作业空间大、环境适应性强等性能,而且对其负载能力、动特性等提出更高要求。
2、专利cn113733055a、cn113733055a、cn108284428a、cn116922362a、ep3138670a1、ep3272470b1所公开的可用于转运的机器人均采用串联结构,负载自重比低、静动态性能差,无法满足重载转运的高效率要求。
3、专利cn212608257u、cn110815183a、cn110815184a、cn106826765a、cn106584426a所公开的转运机器人以并联机构为核心,但驱动关节采用转动驱动方案,力臂长,难以满足大范围的重载转运应用需求。
技术实现思路
1、针对上述问题,本发明提供一种含共轴线驱动关节的并联转运机器人及其运行方法,实现制造具有高性价比、高负载自重比和大运动空间的含共轴线驱动关节的并联转运机器人。
2、本发明所采用的技术方案是:
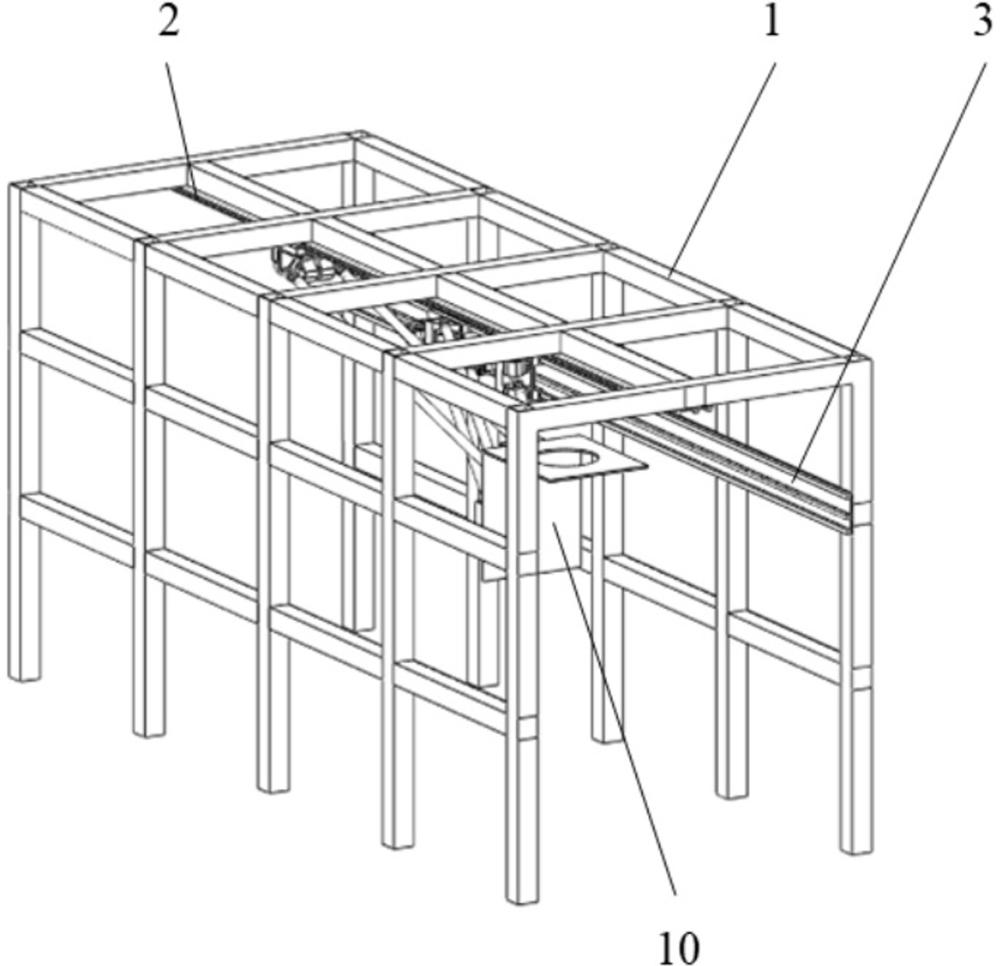
3、本发明含共轴线驱动关节的并联转运机器人,包括有桁架结构、安装在桁架结构上的导向部、多个移动部、多个连杆和末端执行部,
4、所述桁架结构中间为贯穿的转运通道,导向部分为第一导向部和第二导向部,上设有直线导轨,第一导向部安装于桁架结构的上面,第二导向部安装于桁架结构的侧面;
5、所述第一移动部安装于第一导向部的直线导轨上,第二移动部和第三移动部一前一后安装于第二导向部的直线导轨上,第一移动部、第二移动部和第三移动部分别设有直线驱动部;
6、所述直线驱动部驱动所述第一移动部沿第一导向部的直线导轨直线运动,第二移动部和第三移动部安装在第二导向部上,呈现前后布置,所述直线驱动部驱动所述第二移动部和第三移动部沿第二导向部的直线导轨直线运动;
7、所述第一运动连杆、第二运动连杆、第三运动连杆与末端执行部并行连接,
8、所述第一运动连杆的前端杆通过安装在末端执行部上的旋转关节a与末端执行部连接,后端杆通过安装在第一移动部上的旋转关节b与第一移动部连接;
9、所述第二运动连杆的前端杆通过安装在末端执行部上的旋转关节c与末端执行部连接,后端杆通过安装在第二移动部上的旋转关节d与第二移动部连接;
10、所述第三运动连杆的前t型轴通过安装在末端执行部上的旋转关节e与末端执行部连接,后t型轴通过安装在第三移动部上的旋转关节f与第三移动部连接;
11、旋转关节a和旋转关节c的旋转中心垂直设置,旋转关节c与旋转关节e的旋转中心平行设置,旋转关节c相对旋转关节e处于第二导向部的远端,第一运动连杆设有两平行的连杆,且两连杆分别与旋转关节a的两端铰接相连,第二运动连杆设有两平行的连杆,且两连杆分别与旋转关节c的两端铰接相连;
12、通过调整第一移动部在第一导向部的位置,以及第二移动部和第三移动部在第二导向部的位置,调整末端执行部朝向一侧进行上下左右以及前后运动。
13、根据所述的一种含共轴线驱动关节的并联转运机器人,第一导向部和第二导向部直线导轨的导向轴线相互平行。
14、根据所述的一种含共轴线驱动关节的并联转运机器人,第一运动连杆和第二运动连杆结构相同,
15、第一运动连杆、第二运动连杆包括后端杆、前端杆、上端杆、下端杆、转动副a、转动副b、转动副c和转动副d,所述后端杆的上端通过转动副a与上端杆的后端连接,所述后端杆的下端通过转动副d与下端杆的后端连接,所述前端杆的上端通过转动副b与上端杆的前端连接,所述前端杆的下端通过转动副c与下端杆的前端连接。
16、根据所述的一种含共轴线驱动关节的并联转运机器人,,所述第三运动连杆包括前t型轴、转动副e、长连杆、转动副f、后t型轴,所述前t型轴通过转动副e与长连杆的前端连接,所述后t型轴通过转动副f与长连杆的后端连接。
17、根据所述的一种含共轴线驱动关节的并联转运机器人,所述后端杆、前端杆、上端杆和下端杆构成平行四边形机构,始终保持后端杆与前端杆相互平行、上端杆与下端杆相互平行。通过第一运动连杆的平行四边形机构保持末端执行部的底面与桁架结构的上侧面平行,通过第二运动连杆的平行四边形机构保持末端执行部的左右侧面与桁架结构的左右侧面平行。
18、根据所述的一种含共轴线驱动关节的并联转运机器人,所述第一移动部和第二移动部结构相同,包括安装座a、电机a,所述电机a安装在安装座a上,电机a驱动安装座a沿导向部直线运动。
19、根据所述的一种含共轴线驱动关节的并联转运机器人,所述第三移动部包括:安装座b、电机b,所述电机b安装在安装座b上,电机b驱动安装座b沿导向部直线运动。
20、根据所述的一种含共轴线驱动关节的并联转运机器人,所述第一移动部和第二移动部的电机a,以及第三移动部的电机b替换为液压或气压驱动结构。
21、根据所述的一种含共轴线驱动关节的并联转运机器人,末端执行器设有固定端以及运动部件安装端,所述旋转关节a、旋转关节c和旋转关节e设置在固定端的竖向平面上。
22、本发明含共轴线驱动关节的并联转运机器人的运行方法,
23、以同时垂直于第一导向部和第二导向部的导向方向的桁架结构界面为基准面,
24、包括如下运行步骤,
25、末端执行部相对基准面前后运动:
26、第一移动部、第二移动部和第三移动部沿对应导向部同向同一速度移动,通过第一运动连杆、第二运动连杆、第三运动连杆带动末端执行部直线运动,即桁架结构内前后运动;
27、末端执行部沿上述基准面左右运动:
28、第一移动部相对基准面位置不动,第二移动部沿第二导向部向前运动,第二运动连杆绕旋转关节d向后做半径进行摆动;第三移动部沿第二导向部向后运动或第三移动部沿第二导向部运动的运动速度小于第二移动部沿第二导向部的运动速度,第三运动连杆绕旋转关节f向前做半径进行摆动,此时末端执行部向基准面的左侧运动;
29、第三移动部沿第二导向部向前运动,第三运动连杆绕旋转关节f向后做半径进行摆动,第二移动部沿第二导向部向后运动或第二移动部沿第二导向部的运动速度小于第三移动部沿第二导向部的运动速度,第二运动连杆绕旋转关节d向前做半径进行摆动;此时末端执行部向基准面的右侧运动;
30、末端执行部沿上述基准面上下运动:
31、第一移动部沿第一导向部向前运动,第一运动连杆绕旋转关节b向后进行摆动;第二移动部和第三移动部相对平面不动或沿第二导向部的运动速度小于第一移动部沿第一导向部的运动速度,第一运动连杆绕旋转关节b向后进行摆动,末端执行部此时在平面内向下运动;
32、第一移动部沿第一导向部向后运动,第一运动连杆绕旋转关节b向前进行摆动;第二移动部和第三移动部相对平面不动或沿第二导向部的运动速度大于第一移动部沿第一导向部的运动速度,第一运动连杆绕旋转关节b向前进行摆动,末端执行部此时在平面内向上运动;
33、上述步骤同步或异步运动,带动末端执行部在桁架结构内运动。
34、本发明的一种含共轴线驱动关节的并联转运机器人,具有如下优点和积极效果:
35、1. 第一运动连杆、第二运动连杆、第三运动连杆与末端执行部并行连接,并由第一移动部、第二移动部和第三移动部驱动,与专利cn113733055a、cn113733055a、cn108284428a、cn116922362a、ep3138670a1、ep3272470b1相比,提高了转机器人的负载自重比和末端静动刚度;
36、2. 通过调整第一移动部、第二移动部和第三移动部在第一导向部和第二导向部的位置,调整末端执行部的位置,与专利cn212608257u、cn110815183a、cn110815184a、cn106826765a、cn106584426a相比,大幅提高了转运机器人的运动范围和负载能力。
37、3. 第一运动连杆、第二运动连杆、第三运动连杆均采用连杆机构,有利于减轻机器人机械本体的重量,且第二移动部和第三移动部同时安装于第二导向部,有利于减少导轨数量,降低制造成本。
本文地址:https://www.jishuxx.com/zhuanli/20241226/343876.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表