一种五轴联动点胶机的制作方法
- 国知局
- 2024-12-26 15:29:50
本技术涉及点胶,更具体地说,是涉及一种五轴联动点胶机。
背景技术:
1、针对现有光通信行业光模块,cob、100g、400g、800gqsfp28等接口组件通常采用全手工点胶。
2、例如,人工装夹产品,右手握住点胶针筒在cob,100g,400g,800gqsfp28等光模块缝隙填充胶水。
3、由于模块点胶位置路径异形,胶量填充不均匀比较难控制,手持针头接触产品容易将预耦合的接收端产品位移。且胶量标准极高,全手工点胶效率低,良率极低,需要人工双手双目和脚协同动作,导致人工疲劳,工序重复频率高,效率低,如果胶量不满足标准,后工序需要重新耦合再次点胶。人员数量及工作强度非常大。
4、因此,现有技术有待改进。
技术实现思路
1、本技术的目的在于提供一种五轴联动点胶机,旨在解决现有技术中针对光通信工件的人工点胶效率低的技术问题。
2、为实现上述目的,本技术采用的技术方案是:
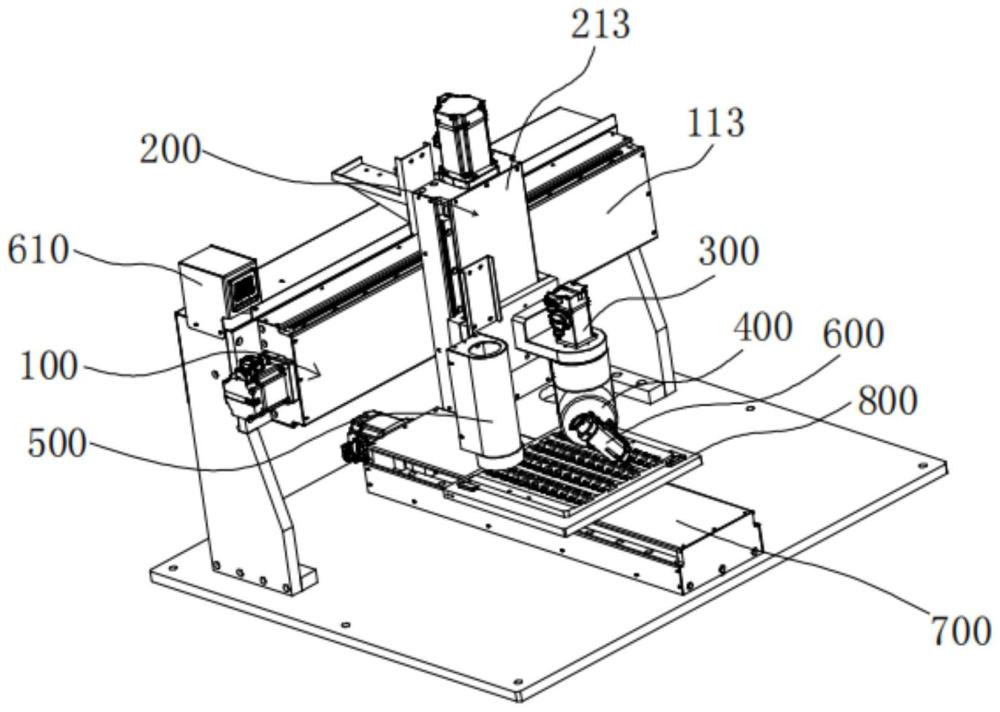
3、本技术提供一种五轴联动点胶机,其中,包括:
4、x轴左右移动机构;
5、z轴上下移动机构,z轴上下移动机构连接于x轴左右移动机构;
6、rx轴旋转机构,rx轴旋转机构连接于z轴上下移动机构;
7、rz轴旋转机构,rz轴旋转机构连接于rx轴旋转机构;
8、视觉系统,视觉系统连接于z轴上下移动机构;
9、点胶机构,点胶机构连接于rz轴旋转机构;
10、y轴前后移动机构,y轴前后移动机构可动地设置于z轴上下移动机构的下方,且y轴前后移动机构与工装治具连接。
11、通过上述方案,视觉系统能够对工装治具上的产品进行扫描,生成点胶路径,然后点胶机构在与x轴左右移动机构、z轴上下移动机构、rx轴旋转机构、rz轴旋转机构以及y轴前后移动机构相互运动配合下实现五轴联动自动点胶的工作,点胶精度高,点胶工作更为灵活,能够适应现有的各种元器件曲面位置的点胶要求,胶厚更为均匀,避免缺胶、溢胶,保证产品品质的稳定性,提高生产效率,应用空间范围更广,适应点胶品种更多,节约生产成本。
12、在一种实施方式中,x轴左右移动机构包括:
13、第一支撑座;
14、第一步进电机,第一步进电机设置于第一支撑座;
15、第一丝杆模组,第一丝杆模组与第一步进电机传动连接。
16、通过上述方案,本技术中x轴左右移动机构通过丝杆步进电机进而实现驱动点胶机构进行左右移动,第一丝杆模组通过导轨和滑块,滑块在步进电机的驱动下而实现移动,使得点胶机构在左右运动过程中更加稳固,提高了点胶精度和稳定性。
17、在一种实施方式中,z轴上下移动机构包括:
18、第二支撑座,第二支撑座与x轴左右移动机构连接;
19、第二步进电机,第二步进电机设置于第二支撑座;
20、第二丝杆模组,第二丝杆模组与第二步进电机传动连接。
21、通过上述方案,本技术中z轴左右移动机构通过丝杆步进电机进而实现驱动点胶机构进行升降移动,第二丝杆模组通过导轨和滑块,滑块在步进电机的驱动下而实现移动,使得点胶机构在升降运动过程中更加稳固,提高了点胶精度和稳定性。
22、在一种实施方式中,rx轴旋转机构包括:
23、第三支撑座,第三支撑座与z轴上下移动机构连接;
24、第一旋转电机,第一旋转电机设置于第三支撑座;
25、第一旋转轴,第一旋转轴与第一旋转电机传动连接。
26、通过上述方案,本技术中rx轴旋转机构通过旋转电机实现在水平方向的旋转,用以驱动点胶机构在水平方向进行旋转,以在点胶过程中方便调整点胶位置和角度,提高点胶效率,确保点胶位置的精确性。
27、在一种实施方式中,rz轴旋转机构包括:
28、第四支撑座,第四支撑座与rx轴旋转机构连接;
29、第二旋转电机,第二旋转电机设置于第四支撑座;
30、第二旋转轴,第二旋转轴与第二旋转电机传动连接。
31、通过上述方案,本技术中rz轴旋转机构通过旋转电机实现在竖直平方向的旋转,用以驱动点胶机构在竖直方向进行旋转,以在点胶过程中方便调整点胶位置和角度,提高点胶效率,确保点胶位置的精确性。
32、在一种实施方式中,视觉系统包括:
33、相机壳体,相机壳体与z轴上下移动机构连接;
34、3d扫描相机,3d扫描相机设置于相机壳体内;
35、摄像孔,摄像孔开设于相机壳体,摄像孔用于显露3d扫描相机;
36、橡胶套环,橡胶套环设置于相机壳体靠近y轴前后移动机构的一侧,且橡胶套环与摄像孔连通。
37、通过上述方案,通过x轴左右移动机构和z轴上下移动机构分别驱动进而实现3d扫描相机的移动,以便采集点胶机构的图像信息,进而确认点胶机构的方向和角度,保证点胶机构的点胶精度和质量,同时3d扫描相机置于相机壳体内,并且其下端连接设置有橡胶套环,相机壳体和橡胶套环能有效保护3d扫描相机,防止3d扫描相机出现碰撞损坏。
38、在一种实施方式中,点胶机构包括:
39、恒温控制系统,恒温控制系统设置于x轴左右移动机构;
40、针筒恒温模块,针筒恒温模块与恒温控制系统电连接;
41、点胶针筒,点胶针筒设置于rz轴旋转机构,且针筒恒温模块包裹于点胶针筒。
42、通过上述方案,恒温控制系统用于对点胶针筒进行加热,使得点胶针筒具备恒温功能,实现0-100℃可调,精准恒温,保证胶水流动性。
43、在一种实施方式中,y轴前后移动机构包括:
44、第五支撑座,第五支撑座位于z轴上下移动机构下方;
45、第三步进电机,第三步进电机设置于第五支撑座;
46、第三丝杆模组,第三丝杆模组与第三步进电机传动连接。
47、通过上述方案,本技术中y轴前后移动机构通过丝杆步进电机进而实现驱动工装治具进行前后移动,第三丝杆模组通过导轨和滑块,滑块在步进电机的驱动下而实现前后移动,使得工装治具在前后运动过程中更加稳固,提高了点胶精度和稳定性。
48、在一种实施方式中,第五支撑座包括:
49、第五底座,第五底座设置于z轴上下移动机构下方,第五底座具有第五容腔,第五容腔内设置有第三步进电机和第三丝杆模组;
50、一组第五凸缘,第五凸缘设置于第五底座;
51、第五盖板,第五盖板通过第五凸缘盖设于第五底座。
52、通过上述方案,第三步进电机与第三丝杆模组驱动连接,第三丝杆模组与工装治具连接,并且第五盖板盖设于第三步进电机与第三丝杆模组上,在点胶过程中,第五盖板盖能够防止点胶机构滴胶于第三丝杆模组,以确保y轴前后移动机构稳定、安全运行。
53、在一种实施方式中,工装治具包括:
54、第五连接底座,第五连接底座连接于第三丝杆模组;
55、一组第五支撑凸缘,第五支撑凸缘自第五连接底座向上延伸形成;
56、托盘部,托盘部通过第五支撑凸缘与第五连接底座连接,且托盘部通过第五支撑凸缘套设于第五盖板。
57、通过上述方案,第五连接底座与第三丝杆模组连接,并且第五连接底座两端设置有第五支撑凸缘,以使第五支撑座的第五盖板贯穿于第五连接底座,当第三丝杆模组驱动第五连接底座进行移动时,使托盘部在第五盖板上移动,能够防止点胶机构滴胶于第三丝杆模组,以确保y轴前后移动机构稳定、安全运行。
58、本技术提供的一种五轴联动点胶机的有益效果至少在于:
59、本技术公开了一种五轴联动点胶机,其中,包括:x轴左右移动机构、z轴上下移动机构、rx轴旋转机构、rz轴旋转机构、视觉系统、点胶机构以及y轴前后移动机构,z轴上下移动机构连接于x轴左右移动机构,rx轴旋转机构连接于z轴上下移动机构,rz轴旋转机构连接于rx轴旋转机构,视觉系统连接于z轴上下移动机构,点胶机构连接于rz轴旋转机构,y轴前后移动机构可动地设置于z轴上下移动机构的下方,且y轴前后移动机构与工装治具连接。本技术中视觉系统能够对工装治具上的产品进行扫描,生成点胶路径,然后点胶机构在与x轴左右移动机构、z轴上下移动机构、rx轴旋转机构、rz轴旋转机构以及y轴前后移动机构相互运动配合下实现五轴联动自动点胶的工作,点胶精度高,点胶工作更为灵活,能够适应现有的各种元器件曲面位置的点胶要求,胶厚更为均匀,避免缺胶、溢胶,保证产品品质的稳定性,提高生产效率,应用空间范围更广,适应点胶品种更多,节约生产成本。
本文地址:https://www.jishuxx.com/zhuanli/20241226/345930.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表