基于时频平面期望最大化的风电机组传动链故障诊断方法与流程
- 国知局
- 2025-01-10 13:18:56
本发明涉及故障诊断,尤其涉及一种基于时频平面期望最大化的风电机组传动链故障诊断方法。
背景技术:
1、风力发电机是现代可再生能源利用中的重要设备,广泛应用于全球各地的风力发电场。随着全球对清洁能源需求的不断增加,风力发电机的数量和规模也在迅速增长。风力发电机通常安装在高海拔、环境恶劣的地区,这使得风机传动链关键零部件的可靠性和寿命尤为重要。在变转速等复杂工况下,风力发电机的叶片受到短暂而频繁的冲击,使得传动链受到交变的载荷,对其工作寿命造成极大的影响。因此,有效监测风力发电机传动链的运行状态,可以提高运行可靠性,防止重大安全事故发生。风力发电机传动链主要由主轴及支撑轴承(直驱式)、增速齿轮箱(双馈式)等旋转部件组成。目前风力发电机传动链故障诊断面临两个突出问题:1)由于转速等不断变化,导致了故障特征具有典型的时变性和非平稳性;2)由于主轴转速较低,使得传动链上关键零部件的故障特征频率处于较低的频段,同时弱故障信号容易被强噪声淹没,造成了早期弱故障辨识难度大,变转速和弱故障特征提取困难。
2、因此,提供一种基于时频平面期望最大化的风电机组传动链故障诊断方法,采集风电机组传动链在变转速条件下的振动信号,实现风机传动链关键零部件服役状态的准确表征,准确获得不同分量信号的瞬时幅值和瞬时频率,实现对风机传动链故障的早期检测和故障诊断,是非常必要的。
技术实现思路
1、有鉴于此,本发明提出了一种采用柱形mems传感器采集风电机组传动链在变转速条件下的振动信号、提取谱图零点并进行无监督分类以实现信号的去噪预处理、准确获得不同分量信号的瞬时幅值和瞬时频率的基于时频平面期望最大化的风电机组传动链故障诊断方法。
2、本发明提供了一种基于时频平面期望最大化的风电机组传动链故障诊断方法,包括如下步骤:
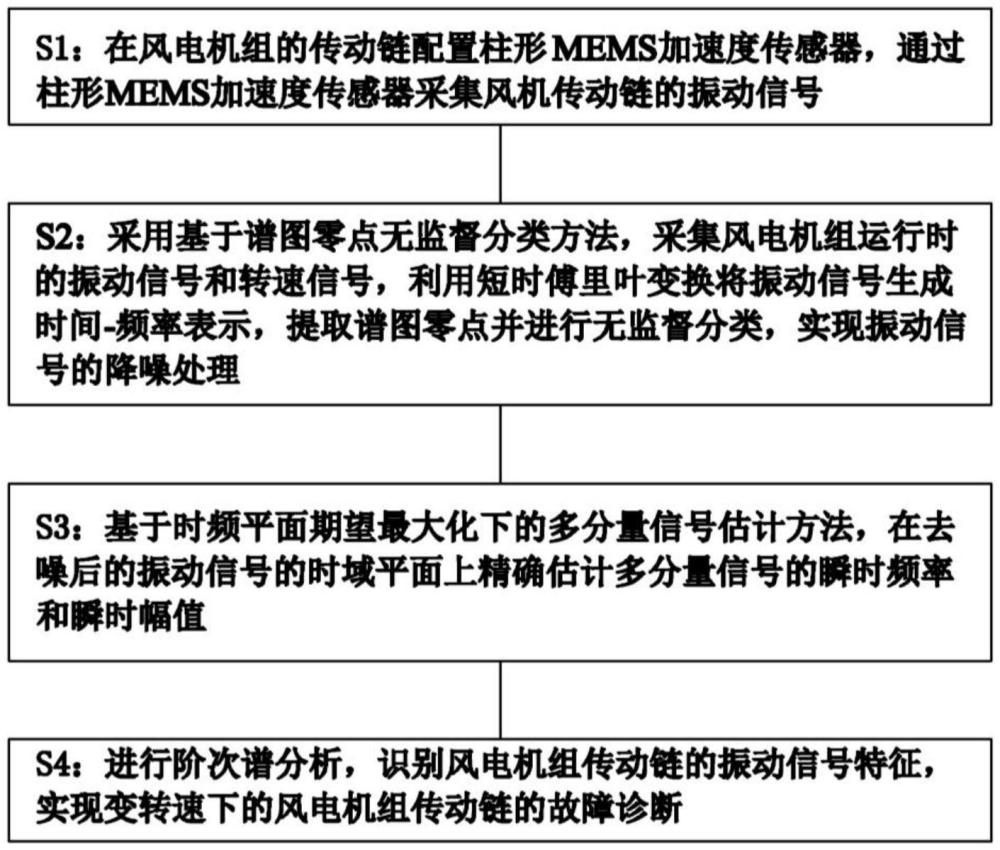
3、s1;在风电机组的传动链配置柱形mems加速度传感器,通过柱形mems加速度传感器采集风机传动链的振动信号;
4、s2:采用基于谱图零点无监督分类方法,采集风电机组运行时的振动信号和转速信号,利用短时傅里叶变换将振动信号生成时间-频率表示,提取谱图零点并进行无监督分类,实现振动信号的降噪处理;
5、s3:基于时频平面期望最大化下的多分量信号估计方法,在去噪后的振动信号的时域平面上精确估计多分量信号的瞬时频率和瞬时幅值;
6、s4:进行阶次谱分析,识别风电机组传动链的振动信号特征,实现变转速下的风电机组传动链的故障诊断。
7、在以上技术方案的基础上,优选的,所述柱形mems加速度传感器包括柱形的底座、质量块和若干极板,底座的表面开设有滑槽,滑槽沿着底座的轴向方向延伸设置;质量块嵌设在滑槽内,并与滑槽内表面滑动连接;质量块的两端分别设置有锚点,锚点的一端与质量块固定连接,锚点的另一端朝着远离质量块的方向延伸,锚点贴合在底座的表面并与底座滑动连接;质量块两侧的非端部位置对称设置有若干梳齿,若干梳齿沿着底座的轴向方向间隔设置,若干梳齿的一端与质量块固定连接,若干梳齿的另一端朝着远离质量块的方向延伸,梳齿与底座的表面滑动连接,相邻的梳齿之间、梳齿与锚点之间间隔设置;若干极板固定设置在相邻的梳齿之间的底座表面,极板相对于底座的位置保持不变;风机传动链产生加速度时,质量块带动锚点和若干梳齿沿着底座的轴向滑动,改变梳齿与相邻极板的间距,从而产生电流信号,采样电流信号的大小并转换为风机传动链在变转速条件下的振动信号。
8、优选的,步骤s2中所述实现振动信号的降噪处理,具体内容包括:
9、将风机传动链的振动信号转换为时间-频率表示,使用高斯窗函数对振动信号进行分段处理,窗口在振动信号上滑动,得到每个时间窗口对应的频谱信息,将各窗口对应的频谱信息进行组合,得到整个振动信号的时间-频率谱图;
10、寻找时间-频率谱图中的零点,根据零点的性质,对零点进行分类为ss类、sn类和nn类;
11、完成零点分类后,在时频平面上,选取ss类、sn类零点进行delaunay三角剖分,获取时频平面中信号域的估计,利用反短时傅里叶变换对信号域估计内的振动信号进行重建,得到无噪声振动信号的估计值。
12、进一步优选的,寻找时间-频率谱图中的零点,根据零点的性质,对零点进行分类,是设置阈值γ,凡是时间-频率谱图的谱图值低于阈值的点视为零点,阈值γ的确定方式为:γ=μx-k0σx,其中μx为谱图值的均值,σx为谱图值的标准差,k0是调整因子;根据零点的性质,将零点分为三类:1)ss类:信号-信号零点;2)sn类:信号-噪声零点;3)nn类:噪声-噪声零点;假定进行n次噪声模拟,得到n个时间-频率谱图,定义零点i在不同噪声模拟中的位置为(tki,fki),k=1,2,...,n,对于每个零点i,计算零点在不同噪声模拟中的位置变化量di:其中共同代表了零点i在第n次噪声模拟中的平均位置,分别取δss和δnn为位置变化量di的阈值,δss为覆盖信号-信号零点位置变化量的第一个峰值的右侧偏移值,δnn为覆盖噪声-噪声零点位置变化量的第二个峰值的左侧偏移值,零点分类的规则为:ss类={i|di≤δss}、nn类={i|di≥δnn}以及sn类={i|δss≤di≤δnn}。
13、更进一步优选的,调整因子k0的取值为2.5。
14、更进一步优选的,所述获取时频平面中信号域的估计,利用反短时傅里叶变换对信号域估计内的振动信号进行重建,得到无噪声振动信号的估计值,具体内容是,完成零点分类后,在时频平面上,选择ss类和sn类零点进行delaunay三角剖分,零点的分布和对应三角形的集合特性被用于识别信号域,三角剖分的边长lij的计算公式为:i,j表是两个不同的零点,(ti,fi)和(tj,fj)分别是两个零点的位置;引入权重因子ωij使三角剖分同时考虑零点的密度和几何距离,其中ρ(t,f)是零点在时间-频率平面上的局部密度,通过权重因子得到三角剖分的每条边的加权边长l′ij,l′ij=ωij·lij,动态调整每条边的有效长度;对于每个三角剖分的三角形,如果任一条边的加权边长大于预设边长阈值则认为三角形属于信号域;将边长大于边长阈值的三角形聚集在一起,得到时间-频率平面中信号域的估计:基于得到的时间-频率平面中的信号域估计,利用反短时傅里叶变换对信号域内的信号进行重建,计算得到无噪声信号的估计值
15、再进一步优选的,步骤s3的内容为:
16、s31、期望步骤:计算振动信号的期望值,将具有多分量的无噪声信号估计值表示为:k=1,2,...,m,ak(t)是第k个分量的瞬时幅值,φk(t)是瞬时相位,n(t)是噪声;然后采用蒙特卡罗采样估计后验分布,从先验分布中生成m个样本θ(i),这里的上标i表示不同的时刻,假设观测信号在每个时间点t上是独立的,对于每个样本θ(i),计算无噪声信号的估计值的似然函数值t=1,2,3,...,t,再计算每个样本的权重然后使用加权平均的方法,估计后验分布的期望值:
17、s32、最大化步骤:在得到符合实际振动信号特征的期望值后,需要更新瞬时频率和幅值的估计值。首先,带入上文求得的振动信号特征的期望值,最大化期望的对数似然函数,找到最优的瞬时频率和幅值:其中θ(t+1)表示第t+1次迭代后的参数估计,利用最大化期望后的结果,更新瞬时频率和幅值的参数:
18、
19、其中是第t+1次迭代后的瞬时相位,为第t次迭代后的k个分量的瞬时幅值,η为学习率;
20、s33、为了确保参数估计的稳定性和准确性,需要重复期望步骤s31和最大化步骤s32,直到参数估计收敛,参数估计的收敛条件为|θ(t+1)-θ(t)|<ε,θ(t)是第t次迭代后的参数估计,ε为收敛阈值;最后提取每个信号分量的瞬时频率和瞬时幅值作为下一步阶次谱分析的输入条件。
21、更进一步的优选的,步骤s4的内容为:完成了对振动信号的信号分量的瞬时频率和瞬时幅值的提取后,获取信号特征分类和转速特征分类的瞬时频率f(t)和ff(t),利用瞬时频率f(t)和ff(t)对变转速信号进行特征提取,根据变转速信号特征提取的结果,实现风力发电机传动链的故障诊断。
22、再进一步的优选的,利用瞬时频率f(t)和ff(t)对变转速信号进行特征提取,是采用阶比分析方法,定义阶比l为转速的倍数,根据阶比的大小,表征风电机组传动链的不同的故障类型和故障位置。
23、优选的,所述相邻梳齿的间隙大于质量块在滑槽内的滑动距离。
24、本发明提供的基于时频平面期望最大化的风电机组传动链故障诊断方法,相对于现有技术,具有以下有益效果:
25、(1)本发明通过采集风电机组传动链在变转速条件下的振动信号,实现风机传动链关键零部件服役状态的准确表征,为后续的时频分析提供有效的数据支撑;其次,提出了基于谱图零点无监督分类方法,通过采集风机运行时的振动和转速信号,利用短时傅里叶变换生成时间频率表示,提取谱图零点并进行无监督分类以实现信号的去噪预处理;然后,提出了时频平面期望最大化算法下的多分量信号估计方法,用于准确获得不同分量信号的瞬时幅值和瞬时频率,实现对非平稳工况下多组分振动信号时频特征的高分辨率时频表示;最终,从上述时频分析方法获得的强可读性时频平面中提取转频和故障特征成分的时频脊线,利用阶次谱分析的手段,实现对风机传动链故障的早期检测和故障诊断;
26、(2)提供了一种柱形mems传感器的结构,相比现有传感器的平面结构,能够限制质量块的自由度,使其仅能沿圆柱轴向移动,限制质量块在其他方向的移动,从而消除测量干扰,多个贴合在圆柱体表面的圆环状极板和圆环形梳齿,梳齿跟随质量块在圆柱表面上下移动,确保电容量仅因极距变化而变化,同时避免了遮盖面积变化对测量的影响,确保了测量的精确性和稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352356.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表