一种清洁机器人的制作方法
- 国知局
- 2025-01-10 13:42:33
本发明涉及清洁设备,特别涉及一种清洁机器人。
背景技术:
1、相关的清洁机器人设有悬崖传感器,用于防止掉落高台,悬崖传感器多设于机体的底面,这导致探测的距离、范围较小,不能及时探测出悬崖;
2、并且,悬崖传感器多是普通的红外传感器,原理是发射激光束,对目标物体进行照射,检测反射回来的激光信号,计算出目标物体的距离,其中,反射光束易受目标物的表面颜色、表面材料、表面粗糙度等特征的影响,若反射光束的信号较弱,易造成计算误差,影响探测结果。
技术实现思路
1、本发明的目的在于提供一种清洁机器人,悬崖传感器设于机体的侧壁,提高探测的范围,并且,悬崖传感器采用激光tof进行探测,更精准、可靠。
2、为达此目的,本发明采用以下技术方案:
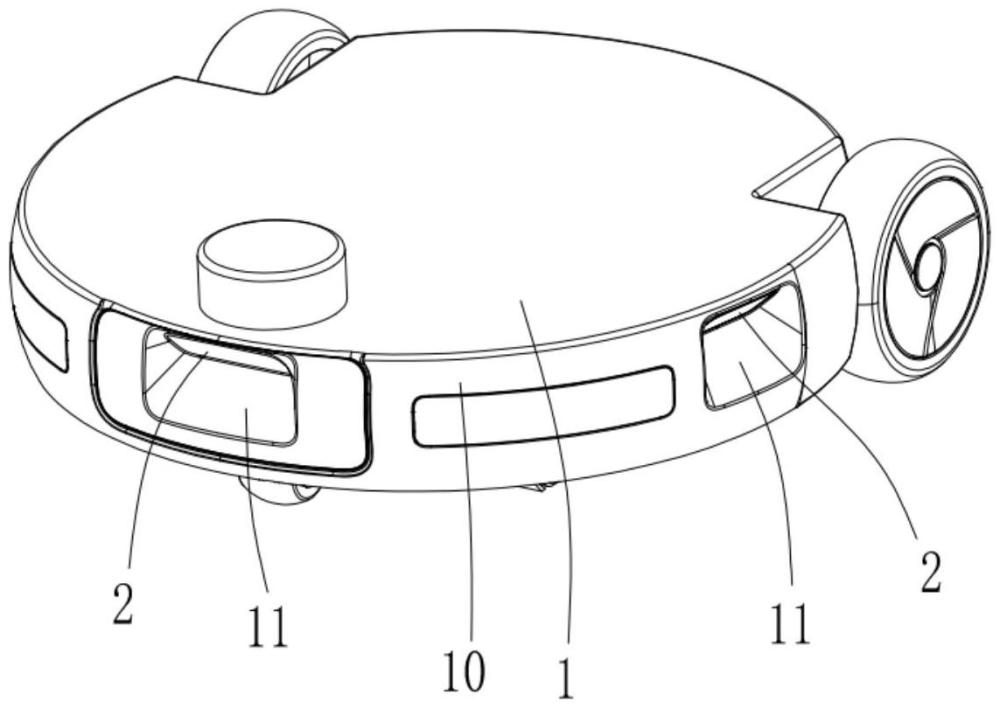
3、一种清洁机器人,包括机体与悬崖传感器;
4、机体的侧壁沿着行走路径的前端、左侧与右侧均设有悬崖传感器;
5、悬崖传感器为向下且向外的倾斜设置,能够倾斜向外的发送探测信号;
6、悬崖传感器的倾斜角度介于20度至70度之间。
7、在一些实施方式中,当机体与悬崖之间的探边距离小于预设值时,该机器人执行避开悬崖的动作;
8、预设值的设定范围为1cm至20cm。
9、在一些实施方式中,悬崖传感器设于侧壁的顶部。
10、在一些实施方式中,悬崖传感器嵌装于侧壁的顶部。
11、在一些实施方式中,侧壁的前端、左侧与右侧均设有凹槽,悬崖传感器组装于凹槽内。
12、在一些实施方式中,凹槽设有第一槽面与第二槽面;
13、第一槽面的面向为向下且向外的倾斜设置;
14、第二槽面的面向为向上且向外的倾斜设置;
15、悬崖传感器组装于第一槽面处。
16、在一些实施方式中,悬崖传感器为激光tof测距传感器。
17、在一些实施方式中,悬崖传感器包括发射单元与接收单元,接收单元设有滤光片。
18、在一些实施方式中,悬崖传感器能够探测台阶、障碍物。
19、本发明的有益效果:悬崖传感器设于机体的侧壁,提高探测的范围,并且,悬崖传感器采用激光tof进行探测,更精准、可靠,能够适用于多种场景。
技术特征:1.一种清洁机器人,其特征在于,包括机体(1)与悬崖传感器(2);
2.根据权利要求1所述一种清洁机器人,其特征在于,当所述机体(1)与悬崖之间的探边距离(h)小于预设值时,该机器人执行避开悬崖的动作;
3.根据权利要求2所述一种清洁机器人,其特征在于,所述悬崖传感器(2)嵌装于所述侧壁(10)的顶部。
4.根据权利要求3所述一种清洁机器人,其特征在于,所述侧壁(10)的前端、左侧与右侧均设有凹槽(11),所述悬崖传感器(2)组装于所述凹槽(11)内。
5.根据权利要求4所述一种清洁机器人,其特征在于,所述凹槽(11)设有第一槽面(11a)与第二槽面(11b);
6.根据权利要求1所述一种清洁机器人,其特征在于,所述悬崖传感器(2)为激光tof测距传感器。
7.根据权利要求6所述一种清洁机器人,其特征在于,所述悬崖传感器(2)能够探测台阶。
8.根据权利要求7所述一种清洁机器人,其特征在于,当所述悬崖传感器(2)探测的数据介于50mm-60mm之间时,判定行进方向有台阶,执行重新规划行走路径或跨越台阶。
9.根据权利要求6所述一种清洁机器人,其特征在于,所述悬崖传感器(2)能够探测障碍物。
10.根据权利要求9所述一种清洁机器人,其特征在于,当所述悬崖传感器(2)探测的数据介于30mm-40mm之间时,判定行进方向有障碍物,执行重新规划行走路径。
技术总结本发明公开了一种清洁机器人,包括机体与悬崖传感器,机体的侧壁沿着行走路径的前端、左侧与右侧均设有悬崖传感器,悬崖传感器为向下且向外的倾斜设置,能够倾斜向外的发送探测信号。悬崖传感器设于机体的侧壁,提高探测的范围;悬崖传感器采用激光TOF原理进行探测,更精准、可靠,并且可以探测悬崖、台阶与障碍物等,实现多种探测功能,节约传感器的种类与数量,利于降低成本。技术研发人员:卢远聪受保护的技术使用者:卢远聪技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354847.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表