一种可用水下机器人操作的高精度沉管对接检测装置
- 国知局
- 2025-01-10 13:49:07
本技术涉及水下物体探测,尤其一种可用水下机器人操作的高精度沉管对接检测装置。
背景技术:
1、水下沉管对接是水下许多工程的重要工序,水下沉管对接精度要求较高,因为沉管对接错位导致工程停机停产的现象屡见不鲜,也给环境和经济等造成了巨大的损失。而沉管对接测控技术是沉管精确对接的重要保障。由于沉管工程建设的复杂性、隐蔽性和一次性等特点,工程质量,尤其是沉管对接过程的质量控制具有非常重要意义。
2、目前的带缆遥控水下机器人(rov)大都以水下搜索、录像、探测等基础功能为主,且需经过复杂后处理,未能对水下沉管状态进行实时监测,精度和效率得不到保障。如果能设计出一个专门运用在水下沉管对接的检测装置,必将很大程度提高水下沉管对接工程的效率和精度。
3、卢胜利公开的一种水下探摸柔性机器人(cn219770145),涉及柔性机器人水下探摸技术领域,包括第一、第二柔性关节,第一和第二柔性关节之间固定连接有密封垫;第一和第二柔性关节的内侧均设有驱动组件;第一和第二柔性关节的内壁均固定连接有柔性连接层;第一柔性关节的一侧与第二柔性关节的一侧均卡合连接有密封盖。该装置的有益效果是:通过浑水摄像机便于获得浑水环境中的目标信息,通过水下灯便于对水下环境进行照明,利于浑水摄像机,同时通过潜水电机便于带动驱动浆转动,便于为第一和第二柔性关节之间提供辅助驱动作用力,便于辅助推动第一和第二柔性关节在水底移动。该系统主要靠光学摄像机的辅助作用对水下进行探摸,而光在水中的信号衰减较快,难以精确获得探摸路径,工作效率地,另外该装置探摸结构较粗大,难以探摸出物体表面细微凹陷或突起区域轮廓,探摸精度不高。
技术实现思路
1、本实用新型的目的在于克服上述现有技术的缺点和不足,提供一种可用水下机器人操作的高精度沉管对接检测装置,可用于水下沉管对接监测的单波束扫测声呐,水下沉管对接探摸的圆柱形滚轮,外圈均匀面布满许多微型探针,探针可以伸缩,用恢复弹簧控制。在滚轮带动下,微型探测针经过探测物体时,探测针向滚轮内测移缩,所有微型探测针移缩的轮廓线平铺在一起,能高精度还原探测区域的轮廓。用激光测距仪对探针伸缩的距离进行精确测量,得到距离后用计算机编程语言进行图像还原,即探摸针伸缩距离越大,显示的颜色越深,当离开探摸物体时,滚轮探摸针在恢复弹簧作用下恢复原来位置,声呐可根据需要绕自身轴进行匀速旋转和绕水平、竖直轴匀速摆动,配合单波束声纳扫测装置及自编声纳后处理程序,可实现物体实时检测,基于此,机器人可以更加灵活对地形轮廓进行判断,快速定位需要探摸物体的方位,提高工作效率;采用了防腐材料能防止装置遭遇腐蚀;另外,采用透声材料保护罩能对声呐起到保护作用的同时,不影响声呐的探测精度。最后,结合声呐实时扫测数据和精确探摸数据,可实现对水下沉管姿态的高精度实时三维图像重建。
2、本实用新型至少通过如下技术方案之一实现。
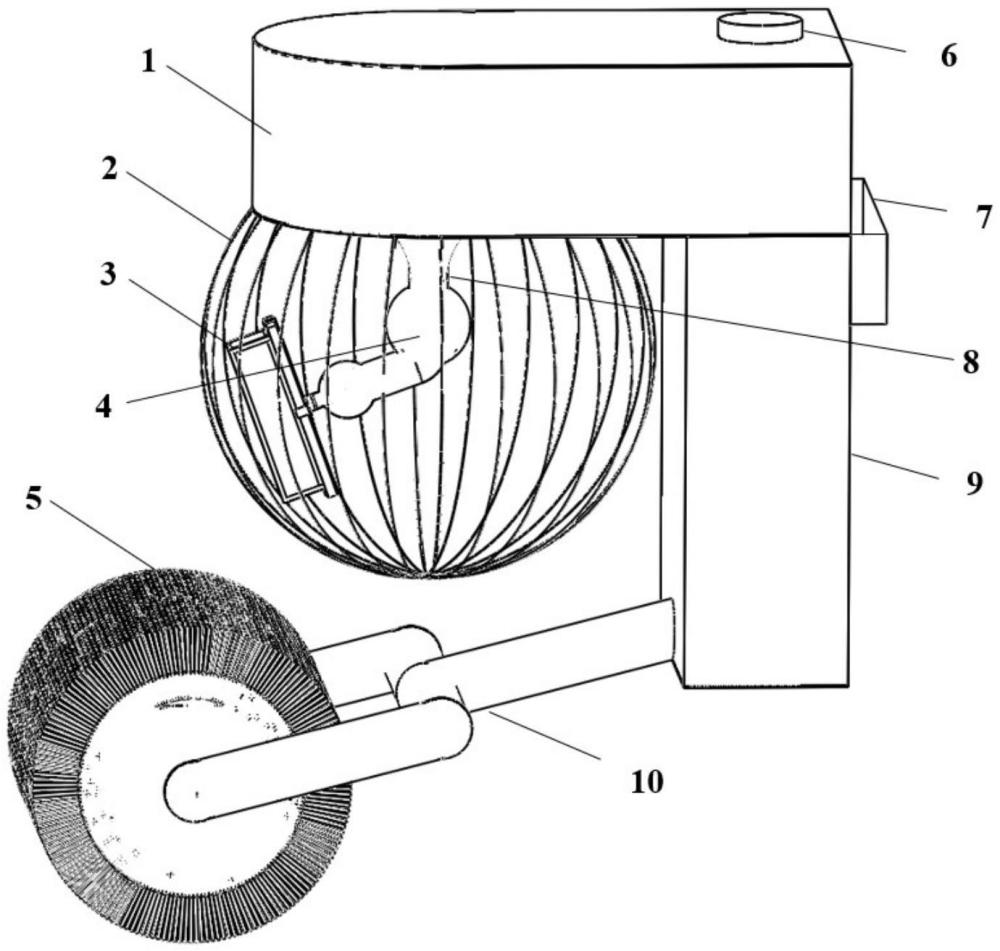
3、一种可用水下机器人操作的高精度沉管对接检测装置,包括蓄电池、透声材料保护罩、声呐、声呐控制系统、圆柱滚轮探测装置和连接结构;
4、所述蓄电池外部设有防腐密封外壳,所述圆柱滚轮探测装置通过连接结构与防腐密封外壳连接;声呐通过声呐控制系统与蓄电池连接;所述透声材料保护罩设置在蓄电池表面,套在声呐外围;
5、蓄电池上设有蓄电池正负极和接线口;
6、所述透声材料保护罩设置在防腐密封外壳表面,套在声呐外围;
7、蓄电池上有正负极接线柱和接线口。
8、进一步地,所述声呐控制系统包括依次连接的水平移动控制装置、旋转控制装置和竖直移动控制装置;水平移动控制装置用于调整声呐在水平方向上的位置,旋转控制装置用于控制声呐进行旋转,竖直移动控制装置用于调整声呐在竖直方向上的位置。
9、进一步地,所述水平移动控制装置包括水平移动壳体以及设置在水平移动壳体内的第一减速齿轮组、直接输出传动轴、第一电位器、间接输出传动轴、第一电路板和第一电机;所述第一电路板通过电路板架固定在水平移动壳体的内壁并与第一电机连接,第一电机固定在水平移动壳体的内壁上,第一电机通过第一减速齿轮组与直接输出传动轴连接,直接输出传动轴与防腐密封管连接,以带动防腐密封管发生转动,从而可以改变声呐3在同一高度上的不同位置,第一电位器设置在间接输出传动轴上并通过第一减速齿轮组与直接输出传动轴连接,第一电位器用于将电压传输给第一电路板,以驱动第一电机工作,所述第一电路板通过电线和蓄电池进行连接,从而获得电能。
10、进一步地,所述旋转控制装置包括旋转控制外壳以及设置在旋转控制外壳内的第二电机、第二减速齿轮组、旋转输出轴、间接输出轴、第二电位器、第二电路板,旋转控制外壳与水平移动壳体固定连接,第二电路板通过电路板架固定在旋转移动壳体的内壁,第二电机固定在旋转控制外壳的内壁上,第二电路板和第二电机连接,第二电机转动带动第二减速齿轮组;第二电机通过第二减速齿轮组与旋转输出轴连接,第二电位器为角度电位器,设置在间接输出轴上,间接输出轴通过第二减速齿轮组与旋转输出轴连接,旋转输出轴与竖直移动控制装置连接。
11、进一步地,所述竖直移动控制装置包括竖直移动壳体以及设置在竖直移动壳体内的第三减速齿轮组、第三电位器、第三电路板、第三电机、齿条和竖直移动输出轴,竖直移动壳体与旋转控制装置的旋转输出轴连接,第三电路板通过电路板架固定在竖直移动壳体的内壁并与第三电机连接,第三电机固定在竖直移动壳体的内壁,第三减速齿轮组与第三电机的输出端连接,齿条连接在第三减速齿轮组的输出端,竖直移动输出轴与齿条连接,且竖直移动输出轴与声呐连接;第三电位器和旋转控制装置的间接输出轴连接。
12、进一步地,所述竖直移动控制装置还包括声呐固定夹,声呐固定夹设置在竖直移动输出轴和声呐之间。
13、进一步地,所述圆柱滚轮探测装置包括圆柱滚轮、探测针、恢复弹簧、弹簧保护壳、激光测距仪;圆柱滚轮外面布置有若干探测针,若干探测针和恢复弹簧进行连接,恢复弹簧外面设有弹簧保护壳。
14、进一步地,所述激光测距仪包括激光发射器、物镜、受光透镜、ccd和图像处理器;激光发射器设置在圆柱滚轮内壳顶端,激光发射器下端与物镜连接;图像处理器设置在圆柱滚轮内壳顶部,高度低于激光发射器,且朝向与激光发射器形成夹角;ccd和图像处理器下端连接;受光透镜设在ccd下端。
15、进一步地,所述连接结构为圆柱形臂,连接结构内置有用于电能和信号传输的电线。
16、进一步地,所述声呐控制系统设在防腐密封管中,所述防腐密封管两端分别与防腐密封外壳和声呐进行连接;防腐密封外壳上设有用于搬运的固定结构。
17、本实用新型相对于现有技术,具有如下的优点及效果:
18、本实用新型可用水下机器人操作的高精度沉管对接检测装置,旨在提高水下沉管对接的精度及工作效率。装置探摸技术能够实时对物体轮廓进行探测,帮助图像重建,同时高灵敏度探针配备激光探测技术,便于工程施工,提高工作效率,且配备了单波束扫测声呐装备及技术,能实时获取目标区域水下声学地貌图,大大提高机器人工作效率;采用防腐材料能维护构件不被腐蚀;透声材料能对声呐起到保护作用的同时,不影响声呐的探测精度;
19、此外,本装置的声呐控制系统,能使声呐绕自身中心轴匀速旋转和绕水平、竖直两个轴匀速摆动,能对探测区域进行跟踪,划定最优探摸路径,大大提高工作效率;充分利用了声呐系统和探摸系统技术,通过控制系统实现两者相互联系、相互配合作业,最终结合声呐实时扫测数据和实时精确探摸数据,可实现对水下沉管姿态的高精度进行探测,有助于实时三维图像重建,从而可对水下沉管对接姿态做出精准判断。
20、本装置可用水下机器人操作的高精度沉管对接检测装置还能灵活地应对不同工作环境和任务需求,不限于沉管对接检测,还能用于其他水下或海洋工程,具有多功能性。
本文地址:https://www.jishuxx.com/zhuanli/20250110/355439.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表