一种地线除冰装置夹紧力调节方法及除冰装置与流程
- 国知局
- 2025-01-17 12:48:45
本发明涉及架空地线除冰,具体是一种地线除冰装置夹紧力调节方法及除冰装置。
背景技术:
1、输电线路覆冰问题是我国电网面临的棘手问题,输电线路覆冰会造成一系列问题,如杆塔的倒塌、导线舞动引起的短路、铝线的断裂及钢芯的抽动。覆冰已成为威胁我国电力系统安全的严重自然灾害。相较于输电线路,地线因不承担输送电能任务而无电流热效性,导致其覆冰情况更为严重。
2、除冰机器人是针对架空地线的自动化除冰装置,其大多由可沿地线走的行走机构以及可实现除冰作业的除冰机构构成。为确保行走机构能稳定在地线上行走不侧翻,行走机构大多采用夹紧轮夹紧地线的形式,如中国专利公开号为cn115800164b的名称为一种输电线路地线除冰机器人的除冰装置及除冰方法的文本中以及中国专利号为cn114944634a的名称为输电线除冰器及除冰方法的文本中均有记载。
3、上述采用夹紧轮夹紧的方式虽然能有效减低行走机构在运行时除冰装置发生侧翻的概率,但在夹紧轮夹紧力的作用下,又会造成行走机构在行走过程中阻力增大,不可避免的增加了行走机构运行过程中的能耗,从而降低了除冰装置的单次作业时间,故而,该夹紧力的设置以尽可能接近防止除冰装置侧翻的最小夹紧力为最优选。但在实际实施时,导致除冰装置侧翻的主要因素有很多,而现有技术中大多没有针对除冰装置侧翻的最小夹紧力的研究,进而难以根据不同地线工况调节实现夹紧轮夹紧力的实时调节,因此亟待解决。
技术实现思路
1、为了避免和克服现有技术中存在的技术问题,本发明提供了一种地线除冰装置夹紧力调节方法及除冰装置,能根据不同除冰工况获取除冰装置中夹紧轮的最小夹紧力,以实现除冰装置运行过程中夹紧轮夹紧力的优化控制。
2、为实现上述目的,本发明提供如下技术方案:
3、地线除冰装置夹紧力调节方法,包括以下步骤:
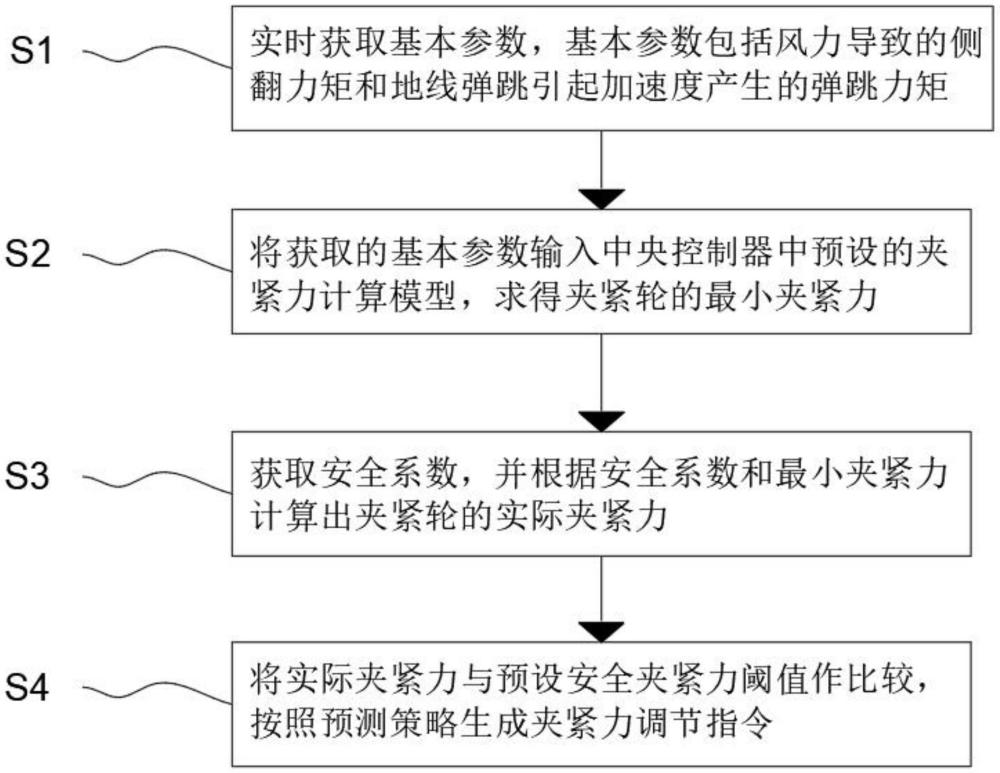
4、s1、实时获取与夹紧效果相关的基本参数,基本参数包括高空风力导致的侧翻力矩和地线弹跳引起加速度产生的弹跳力矩;
5、s2、将基本参数输入到预设的夹紧力计算模型中,以得到夹紧轮的最小夹紧力fmin;
6、s3、获取安全系数y,并根据安全系数y和最小夹紧力fmin计算出夹紧轮的实际夹紧力;
7、s4、将实际夹紧力freal与预设安全夹紧力阈值作比较,按照预测策略生成夹紧力调节指令,以实现除冰装置夹紧力的动态调节。
8、作为本发明进一步的方案:所述步骤s2中预设的夹紧力计算模型为:
9、
10、其中,fmin为夹紧轮的最小夹紧力,单位n;
11、mroll为高空风力导致的侧翻力矩,单位n·m;
12、mbounce为地线弹跳引起加速度产生的弹跳力矩,单位n·m;
13、为除冰装置的倾斜角度,单位rad;
14、μ为夹紧轮与地线的摩擦系数;
15、hcg为除冰装置重心到地线的垂直距离,单位m。
16、作为本发明再进一步的方案:所述高空风力导致的侧翻力矩mroll的计算公式为:
17、
18、其中,mroll为高空风力导致的侧翻力矩,单位n·m;
19、ρ为空气密度,单位kg/m3;
20、v为风速,单位m/s;
21、d为风力作用点与除冰装置重心的铅垂高度差,单位m。
22、a0为除冰装置迎风面积,单位m2,且a0=a·cos(θ),θ为风向与除冰装置正面的夹角,单位rad,a为除冰装置的正投影面积,单位m2。
23、作为本发明再进一步的方案:所述地线弹跳引起加速度产生的弹跳力矩的计算公式为:
24、mbounce=m×at×hcg
25、其中,mbounce为地线弹跳引起加速度产生的弹跳力矩,单位n·m;
26、m为除冰装置的总质量,单位kg;
27、hcg为除冰装置重心到地线的垂直距离,单位m;
28、at除冰过程中导致地线弹跳的加速度,单位m/s。
29、作为本发明再进一步的方案:所述根据安全系数y和最小夹紧力fmin计算出夹紧轮的实际夹紧力,具体为:
30、freal=fmin×y;
31、其中,fmin为夹紧轮的最小夹紧力,单位n;
32、freal为夹紧轮的实际夹紧力,单位n;
33、y为安全系数,与除冰装置自身设计参数相关。
34、作为本发明再进一步的方案:所述预测策略具体包括:
35、当实际夹紧力超出预设安全夹紧力阈值时,则按照安全夹紧力阈值生成夹紧力调节指令;
36、当实际夹紧力不超出预设安全夹紧力阈值时,则按照实际夹紧力生成夹紧力调节指令。
37、除冰装置,该除冰装置应用所述的地线除冰装置夹紧力调节方法,包括底部形成有敞口状的过线通道的骨架和安装在骨架上的破冰机构,过线通道的上部形成仅供地线穿过的行走腔,过线通道的下部形成可供地线和覆冰进入的初始除冰腔;行走腔处安装有用于除冰装置在地线上移动的行走机构,骨架上还安装有夹紧机构和爬行机构,夹紧机构包括两个第二夹板,爬行机构包括两个第一夹板,两个第二夹板和两个第一夹板均对称分布在所述初始除冰腔所在通道的两侧,两个第二夹板之间以及两个第一夹板之间均形成敞口状的夹持区,且两个第二夹板和两个第一夹板均可沿垂直于过线通道方向做水平的往复夹紧运动,以夹紧清除地线上的覆冰,并在覆冰清除后夹紧地线;夹紧机构和爬行机构之间设置有沿过线通道长度方向布置的爬行气缸。
38、作为本发明再进一步的方案:所述行走机构包括安装在所述行走腔上部的行走轮,行走轮的轴线呈垂直于过线通道的水平布置,且行走轮由行走电机驱动转动;夹紧机构还包括分别安装在两个第二夹板上方的两个夹紧轮,两个夹紧轮的外周具有与地线形成斜楔配合的楔面,当夹紧机构上的两个夹紧轮做夹紧动作时,由行走轮和两个夹紧轮共同对地线形成夹紧。
39、作为本发明再进一步的方案:所述破冰机构包括安装在骨架前进端的台座,台座上安装有驱动破冰冲击锤做往复冲击动作的往复动力机构。
40、作为本发明再进一步的方案:所述破冰冲击锤的锤头呈倒u字形结构,且锤头的内腔套设在地线的外周,破冰机构上还安装有升降机构,破冰冲击锤和往复动力机构安装在升降机构的升降座上。
41、与现有技术相比,本发明的有益效果是:
42、1、本发明中,将高空风力和大量覆冰在除冰过程中掉落时引发地线产生跳线动作作为除冰装置发生侧翻的主要因素。将高空风力导致的侧翻力矩和地线弹跳引起加速度产生的弹跳力矩作为调节夹紧轮夹紧力的基本参数。根据实时获取的上述基本参数,输入预设的夹紧力计算模型求得夹紧轮的最小夹紧力fmin。此外,根据可能引发除冰装置侧翻的其他次要因素,获取一个安全系数y;利用安全系数y和最小夹紧力fmin计算出夹紧轮的实际夹紧力freal。最后,利用实际夹紧力freal与预设安全夹紧力阈值作比较,按照预测策略生成夹紧力调节指令,由此可根据除冰装置在运行过程中的不同的工况条件,实现对夹紧轮夹紧力的实时调节,从而实现除冰装置运行过程中夹紧轮夹紧力的优化控制,进而保障除冰装置尽可能低阻力的稳定运行。
43、2、本发明的除冰装置中,设置有夹紧机构和爬行机构,可通过第一夹板和第二夹板的往复夹紧,实现地线初始段覆冰的清除。此外,夹紧机构和爬行机构之间爬行气缸的设置,使得夹紧机构和爬行机构之间具有可沿地线爬行滑动的功能,由于骨架的过线通道从上往下依次设置为行走腔和初始除冰腔,且行走腔仅供地线通过,而动力机构位于行走腔内,夹紧机构和爬行机构的夹持区位于初始除冰腔所在通道的两侧,故而,在地线初始段覆冰未完全清除前,地线将始终会位于夹紧机构和爬行机构的夹持区,无法滑入行走腔与动力机构形成动力配合。此时,可通过除冰装置的夹紧机构和爬行机构彼此配合爬行除冰,直至将地线初始段的覆冰完全除去,此后,骨架在重力作用下向下滑动,并使得行走腔套设于地线外周,并与行走机构形成动力配合,以使得地线的初始段能实现行走机构的正常行走,由此最终实现除冰装置的自动化安装。
44、3、本发明的除冰装置中,相对于现有技术中的,行走机构采用常规的两个铅垂布置的行走轮,且两个行走轮由直行程机构驱动产生对地线的夹紧动作,以实现对地线夹紧驱动的方式。本发明中,在地线初始段除冰的夹紧机构上配备夹紧轮,在初始段除冰完成后,由夹紧机构上的夹紧轮与行走轮共同与地线形成夹紧,无需在行走机构中额外配备直行程机构,降低了除冰装置的成本和负重。
本文地址:https://www.jishuxx.com/zhuanli/20250117/355552.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表