-
机器人导纳控制方法、装置、设备及存储介质与流程
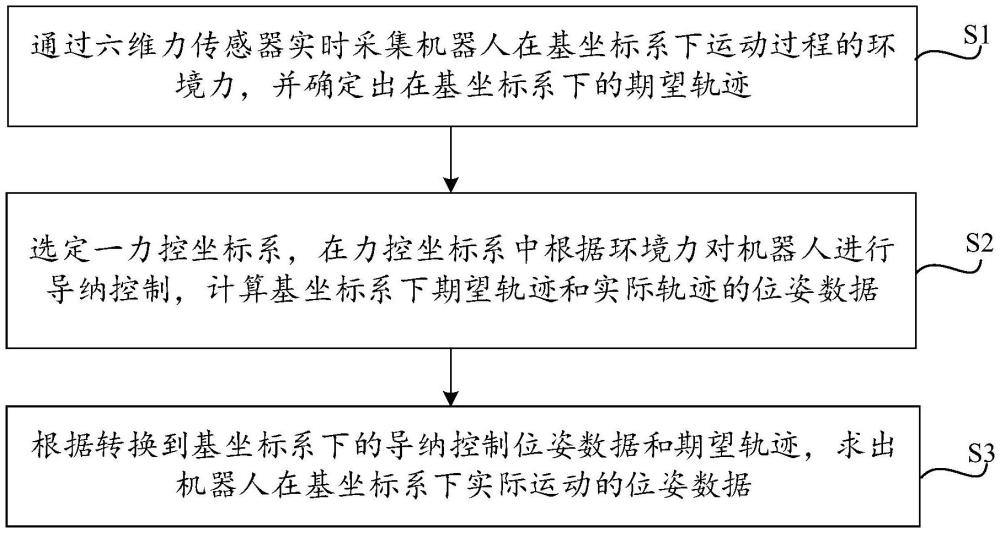
本申请涉及机器人领域,特别涉及一种机器人导纳控制方法、装置、设备及存储介质。背景技术:1、机器人在执行任务时往往面临不稳定的工件或外部干扰,例如不规则形状的物体、不确定的摩擦力或外力扰动等。基于任意坐......
-
一种带多层测温功能的多段导纳油水界面仪的制作方法
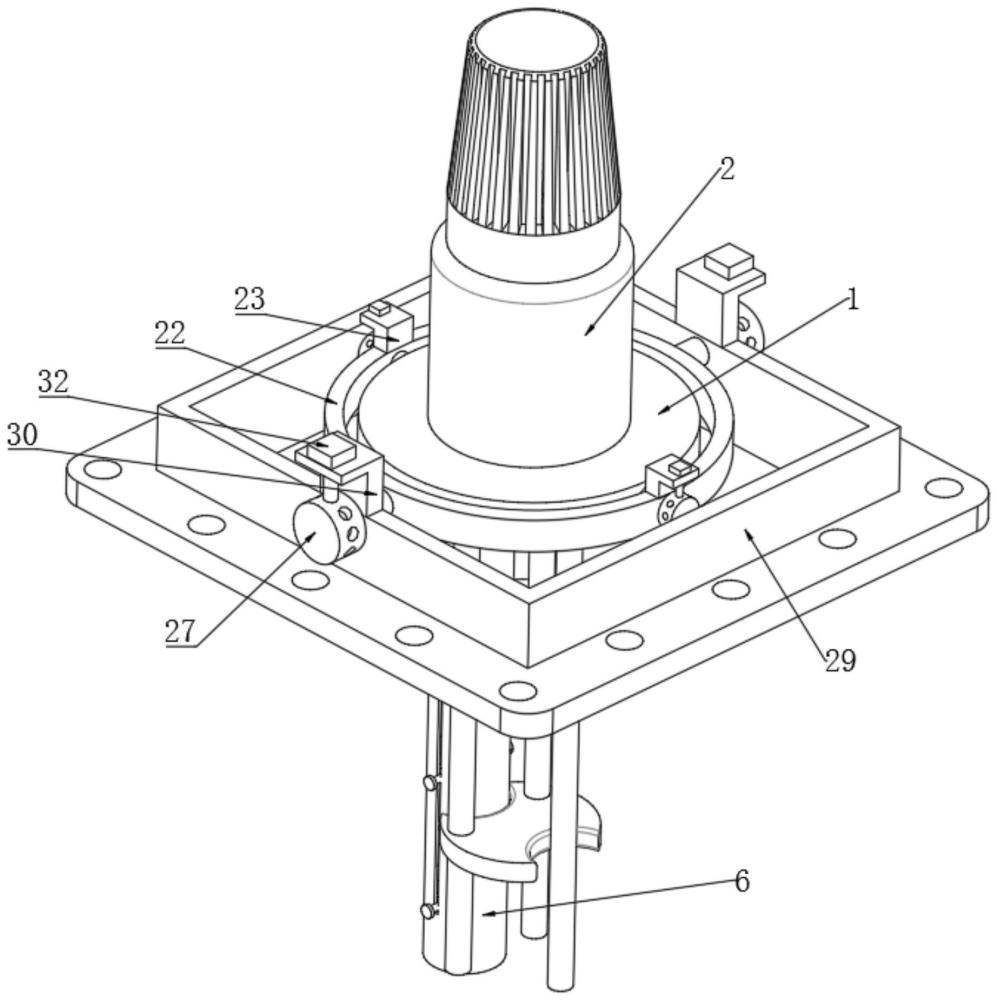
本技术涉及界面仪,尤其涉及一种带多层测温功能的多段导纳油水界面仪。背景技术:1、多段导纳油水界面仪采用导纳原理进行测量,通过传感器将油水界面位置转换为电信号,再经过处理得到准确的界面位置信息,与传统的......
-

基于力感知的机器人人机物理协作共享可变导纳控制方法
本发明涉及自动控制技术与机器人控制,特别是指一种基于力感知的机器人人机物理协作共享可变导纳控制方法。背景技术:1、随着机器人技术的飞速发展,人机协作逐渐成为工业、医疗、服务等领域的重要研究热点。在人机......
技术新讯 > 导纳 > 列表
 2024-10-15
2024-10-15精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -
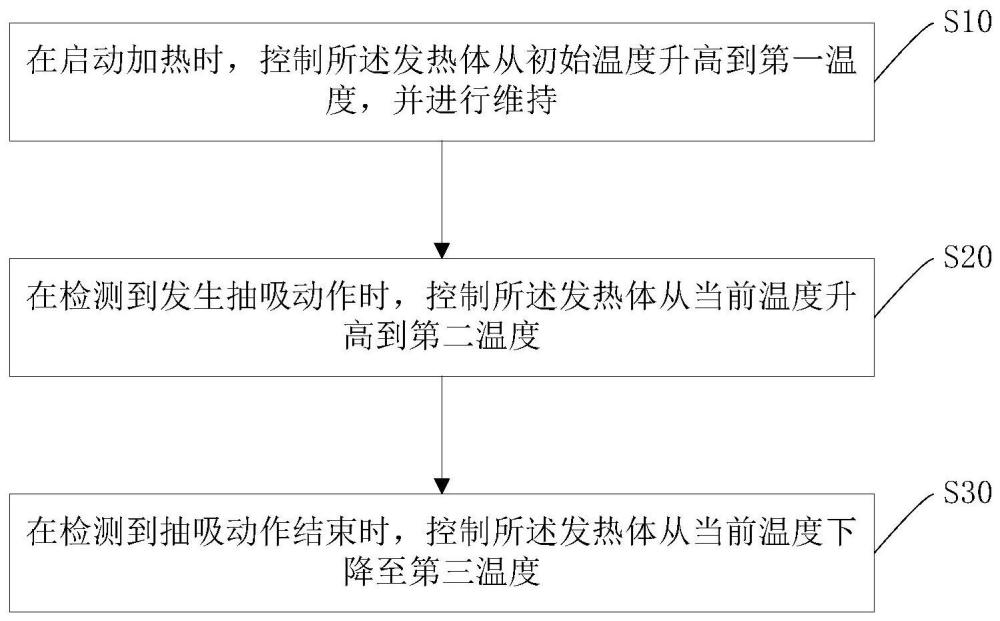
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01