机器人导纳控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-10-15 09:47:38
本申请涉及机器人领域,特别涉及一种机器人导纳控制方法、装置、设备及存储介质。
背景技术:
1、机器人在执行任务时往往面临不稳定的工件或外部干扰,例如不规则形状的物体、不确定的摩擦力或外力扰动等。基于任意坐标系的导纳力控制可以提供更高的控制精度和准确性,使机器人能够在不同坐标系下对力的大小、方向和时间变化进行精确控制,从而能够实现稳定的力控制并避免不受控制的运动或失稳。这对于一些对精确力控制要求较高的任务非常重要,例如医疗手术、精密组装或材料加工等。此外,导纳力控制还可以提高机器人操作的安全性,通过及时检测和响应外部力的变化,避免对人体或周围环境造成损害。
2、在相关技术中,专利cn112959337a中利用坐标转换计算每个切割路径点处的切割工具和牙齿矫治器的相对坐标,并将路径信息导入到机器人控制器中,根据切割效果进行位置补偿。缺陷是直接根据切割效果进行误差补偿,且该方案中并未叙述两者之间明确的关系。专利cn116160439a中利用导纳控制和积分控制算法,根据工具坐标系下的接触力和力矩,获取工具坐标系下的位置补偿量,转换为关节空间的关节补偿量,对机器人的关节进行控制。缺陷一是该方案中只给出了力控坐标系为工具坐标系的这一种特殊情况,可能会限制在某些特定情况下的应用和灵活性。在某些情况下,使用可任意设定的力控坐标系可以更好地适应不同的工具和应用需求,提高系统的灵活性和适应性;二是该专利导纳力控的参数只给了刚度和阻尼两个参数,相对于我们提出的导纳力控少了质量(惯性)参数,控制效果略显逊色;三是该方案中需要将工具坐标系下的位置补偿量转换为关节空间的关节补偿量,该步骤位置补偿量转换为关节补偿量涉及非线性的正运动学逆解计算,这可能引入计算误差,且复杂性较高。
技术实现思路
1、本申请实施例提供一种机器人导纳控制方法、装置、设备及存储介质,解决相关技术中计算误差和复杂性较高的问题。
2、一方面,本申请实施例提供一种机器人导纳控制方法,所述方法包括:
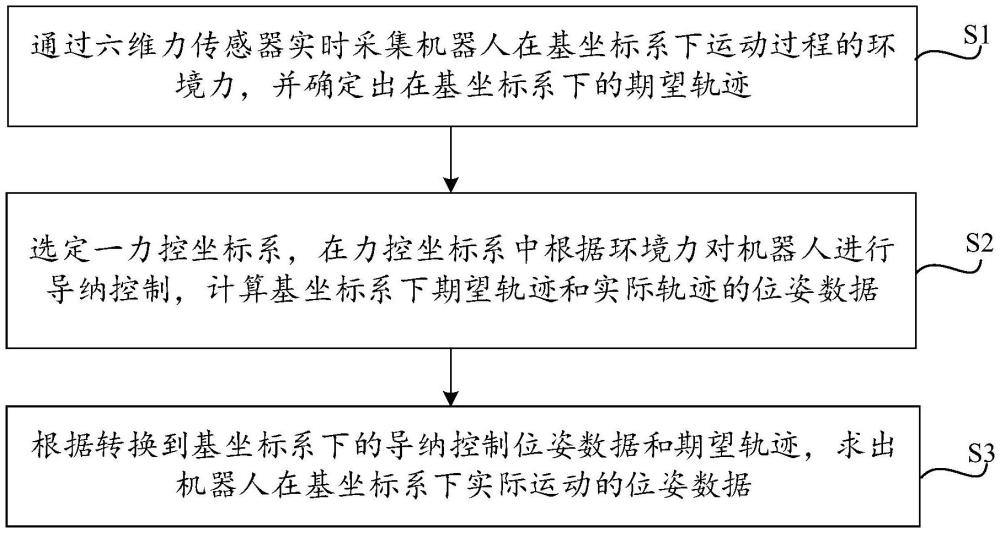
3、通过六维力传感器实时采集机器人在基坐标系下运动过程的环境力,并确定出在基坐标系下的期望轨迹;
4、选定一力控坐标系,在力控坐标系中根据环境力对机器人进行导纳控制,计算基坐标系下期望轨迹和实际轨迹的位姿数据;力控坐标系经过齐次变换矩阵对基坐标系变换得到;
5、根据基坐标系下的位姿数据和期望轨迹,求出机器人在基坐标系下实际运动的位姿数据。
6、具体的,所述力控坐标系为不同与基坐标系的任一坐标系。
7、具体的,选定力控坐标系后,确定力控坐标系与基坐标系之间变换的坐标旋转矩阵和平移关系向量表示如下:
8、
9、根据坐标旋转矩阵确定齐次变换矩阵表示如下:
10、
11、其中和的上标0表示基坐标系,下标1表示力控坐标系;齐次变换矩阵的前三行和前三列为坐标旋转矩阵
12、具体的,所述在力控坐标系中根据环境力对机器人进行导纳控制,包括:
13、基于变换后的力控坐标系对环境力进行描述,表达式如下:
14、
15、其中的1xe、和分别表示机器人实际位姿、速度和加速度在力控坐标系中的表示;m是惯性质量参数,b是阻尼参数,k是刚度参数;fe表示传感器检测到的环境外力。
16、具体的,所述计算基坐标系下实际轨迹的位姿数据,包括:
17、对力控坐标中机器人实际加速度进行二次积分,得到在力控坐标系下的速度和位姿数据,表示如下:
18、
19、其中的和分别表示t时刻的速度和位姿;和1xet+1分别表示t+1时刻的速度和位姿;δt表示积分时间差;
20、将力控坐标系下计算的位姿偏差通过齐次变换矩阵转换到基坐标系下,获得基坐标系下的位姿数据。
21、具体的,所述获得基坐标系下的位姿数据,公式表示如下:
22、基于力控坐标系与基坐标系之间变换的坐标旋转矩阵和平移关系向量计算基坐标系下t+1时刻的位置分量数据和姿态分量数据,表示如下:
23、
24、其中的位姿数据1xe包括位置分量1pe和姿态分量1we,0pet+1和1pet+1分别表示基坐标系和力控坐标系下t+1时刻的位置分量,0wet+1和1wet+1分别表示基坐标系和力控坐标系下t+1时刻的姿态分量。
25、具体的,所述根据基坐标系下的位姿数据和期望位姿,求出机器人在基坐标系下实际运动的位姿数据,包括:
26、
27、其中的为机器人在t+1时刻下期望位姿的位置分量在基坐标系下的表达;表示t+1时刻期望轨迹的姿态所对应的旋转矩阵,r表示开始导纳控制后叠加的姿态矩阵在基坐标系中的表达。
28、另一方面,本申请提供一种机器人导纳控制装置,所述装置包括:
29、确定模块,用于通过六维力传感器实时采集机器人在基坐标系下运动过程的环境力,并确定出在基坐标系下的期望轨迹;
30、第一计算模块,用于选定一力控坐标系,在力控坐标系中根据环境力对机器人进行导纳控制,计算基坐标系下期望轨迹和实际轨迹的位姿数据;力控坐标系经过齐次变换矩阵对基坐标系变换得到;
31、第二计算模块,用于根据转换到基坐标系下的导纳控制位姿数据和期望轨迹,求出机器人在基坐标系下实际运动的位姿数据。
32、又一方面,本申请提供一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现上述方面所说的机器人导纳控制方法。
33、又一方面,本申请提供一种计算机可读存储介质,所述可读存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现上述方面所说的机器人导纳控制方法。
34、本申请实施例提供的技术方案带来的有益效果至少包括:允许机器人在任意坐标系下对外部力和力矩进行主动调节和响应。力控坐标系的选择可以根据具体应用和操作需求进行调整,以便更好地感知和调节机器人与工具或环境之间的力交互。通过基坐标系和力控坐标系的坐标转换,将外部力转换到力控坐标系下进行处理和响应,实现柔性的力交互,以适应不同的工作环境和任务要求,从而提高机器人在复杂和不确定的环境中执行任务的灵活性和适应性。
技术特征:1.一种机器人导纳控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述力控坐标系为不同与基坐标系的任一坐标系。
3.根据权利要求2所述的方法,其特征在于,选定力控坐标系后,确定力控坐标系与基坐标系之间变换的坐标旋转矩阵和平移关系向量表示如下:
4.根据权利要求3所述的方法,其特征在于,所述在力控坐标系中根据环境力对机器人进行导纳控制,包括:
5.根据权利要求4所述的方法,其特征在于,所述计算基坐标系下实际轨迹的位姿数据,包括:
6.根据权利要求5所述的方法,其特征在于,所述获得基坐标系下的位姿数据,公式表示如下:
7.根据权利要求6所述的方法,其特征在于,所述根据基坐标系下的位姿数据和期望轨迹,求出机器人在基坐标系下实际运动的位姿数据,包括:
8.一种机器人导纳控制装置,其特征在于,所述装置包括:
9.一种计算机设备,其特征在于,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现如权利要求1至7任一所述的机器人导纳控制方法。
10.一种计算机可读存储介质,其特征在于,所述可读存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现如权利要求1至7任一所述的机器人导纳控制方法。
技术总结本申请公开机器人导纳控制方法、装置、设备及存储介质,涉及机器人领域,已知机器人在基坐标系下的期望轨迹,通过六维力传感器实时采集机器人所感受到的环境力数据,并任选定一力控坐标系,在力控坐标系中根据采集到的环境力对机器人进行导纳控制,计算出机器人在力控坐标系下由于导纳控制产生的位姿,再将力控坐标系下的位姿换算到基坐标系的位姿,将这个基坐标系下的位姿与机器人在基坐标系下的期望轨迹叠加,最后得到机器人在基坐标系下实际运动的实时位姿数据。该方案可以任选力控坐标系,更好地感知和调节机器人与实际作业环境之间的力和位置的交互,从而提高机器人在复杂和不确定的环境中执行任务的灵活性和适应性。技术研发人员:王延玉,林建雄,孙灵硕受保护的技术使用者:长广溪智能制造(无锡)有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/315377.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种吸附治具的制作方法
下一篇
返回列表