一种机器人操作目标物的定位与识别方法与流程
- 国知局
- 2024-10-15 09:46:21
[]本发明涉及一种机器人操作目标物的定位与识别方法。
背景技术:
0、[背景技术]
1、现有的机器人主要分为两种,一种是安装在固定位置,对确定的目标根据固定流程进行操作,其操作步骤是由程序编程确定,比如普通工业机器人;另外一种就是人工操控的机器人,比如无人机、机器狗,通过人工实时操控干预,才能对相应的目标物进行操作。
2、对于上述机器人,由于其操作相应目标物时,是通过人工编程控制或人工操控干预进行实现,故而缺乏机器人自主作业的灵敏性。而如要提高机器人的灵敏性,问题之一就是要解决机器人如何对操作目标物进行有效、准确地定位及识别。
技术实现思路
0、[技术实现要素:]
1、本发明克服了现有技术的不足,提供了一种机器人操作目标物的定位与识别方法,可使机器人在不同场景中准确地定位和识别目标物,并对目标物执行预设操作任务。
2、为实现上述目的,本发明一种机器人操作目标物的定位与识别方法,其特征在于:包括有
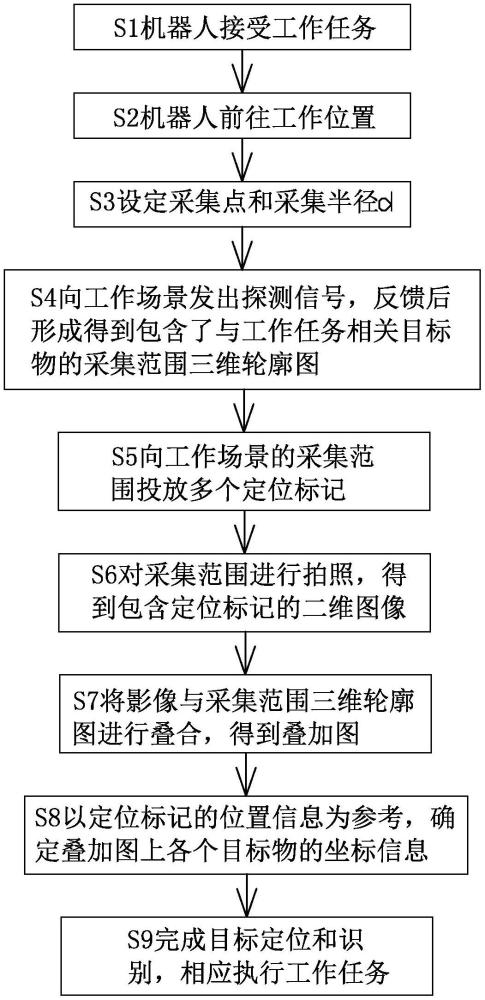
3、s1、机器人接受工作任务;
4、s2、机器人前往工作位置;
5、s3、设定采集点,并设置以采集点为中心点的采集半径d;
6、s4、向工作场景发出探测信号,反馈后形成得到包含了与工作任务相关目标物的采集范围三维轮廓图;
7、s5、向工作场景的采集范围投放多个定位标记;
8、s6、对采集范围进行拍照,得到包含定位标记和目标物的影像;
9、s7、将影像与采集范围三维轮廓图进行叠合,得到叠加图;
10、s8、以定位标记的位置信息为参考,确定叠加图上各个目标物的坐标信息;
11、s9、完成目标定位和识别,相应执行工作任务。
12、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:s1中机器人可在空闲时主动接受工作任务或被动接受工作任务。
13、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:s2中机器人先判断是否处于工作位置;若处于对应的工作位置时不进行移动,否则自动移动到对应工作位置上。
14、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:s4中探测信号为电磁波或超声波。
15、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:s6中定位标记为定位图形或定位实物。
16、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:s8中的坐标信息包括有各个目标物的绝对位置信息、相对位置信息。
17、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:机器人初次执行工作任务时,先进行训练学习,包括s7中通过人工方式识别并标记出相应目标物的名称、特征数据和编辑目标物的操作流程步骤,并进行存储。
18、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:机器人非初次执行工作任务时,s7中可自动识别出新目标物,并通过人工方式标记出相应新目标物的名称及特征数据,并进行存储;以及对新目标物的操作使用步骤进行学习,并进行存储。
19、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:s7中对应目标物的识别从存储中自动搜寻匹配,该存储包括本体存储和云存储。
20、如上所述的一种机器人操作目标物的定位与识别方法,其特征在于:在训练学习时,可设定是否将学习的场景及其工作任务相关的信息进行上传至云存储中。
21、与现有技术相比较,机器人采用本发明方法,在人工指定场景且非首次使用情况下上,机器人可自动地定位及识别目标物;如是首次在人工指定场景中使用,先通过人工辅导机器人学习识别目标物,并将目标物的信息进行存储,再次使时,该机器人则可自动地定位及识别目标物,最后相应地完成用户交代的操作任务;在这过程中,通过发射探测信号的反馈得到采集范围三维轮廓图,并在采集范围上先投放定位标记,然后拍照等到包含有定位标记和目标物的影像,相应地缩放采集范围三维轮廓图和影像,使得二者进行叠合得到叠加图,由于所投放的定位标记的位置信息是确定的,故而以定位标记的位置信息为参考,即可确定叠加图上各个目标物的坐标信息;因此,实现了对目标物的定位和识别,可使得机器人执行任务时具有更高的灵敏性和准确性。
技术特征:1.一种机器人操作目标物的定位与识别方法,其特征在于:包括有
2.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:s1中机器人可在空闲时主动接受工作任务或被动接受工作任务。
3.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:s2中机器人先判断是否处于工作位置;若处于对应的工作位置时不进行移动,否则自动移动到对应工作位置上。
4.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:s4中探测信号为电磁波或超声波。
5.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:s6中定位标记为定位图形或定位实物。
6.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:s8中的坐标信息包括有各个目标物的绝对位置信息、相对位置信息。
7.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:机器人初次执行工作任务时,先进行训练学习,包括s7中通过人工方式识别并标记出相应目标物的名称、特征数据和编辑目标物的操作流程步骤,并进行存储。
8.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:机器人非初次执行工作任务时,s7中可自动识别出新目标物,并通过人工方式标记出相应新目标物的名称及特征数据,并进行存储;以及对新目标物的操作使用步骤进行学习,并进行存储。
9.根据权利要求1所述的一种机器人操作目标物的定位与识别方法,其特征在于:s7中对应目标物的识别从存储中自动搜寻匹配,该存储包括本体存储和云存储。
10.根据权利要求7所述的一种机器人操作目标物的定位与识别方法,其特征在于:在训练学习时,可设定是否将学习的场景及其工作任务相关的信息进行上传至云存储中。
技术总结本发明型公开了一种机器人操作目标物的定位与识别方法,包括有S1机器人接受工作任务;S2机器人前往工作位置;S3设定采集点,并设置以采集点为中心点的采集半径d;S4向工作场景发出探测信号,反馈后形成得到包含了与工作任务相关目标物的采集范围三维轮廓图;S5向工作场景的采集范围投放多个定位标记;S6对采集范围进行拍照,得到包含定位标记和目标物的影像;S7将影像与采集范围三维轮廓图进行叠合,得到叠加图;S8以定位标记的位置信息为参考,确定叠加图上各个目标物的坐标信息;S9完成目标定位和识别,相应执行工作任务,实现了对目标物的定位和识别,可使得机器人执行任务时具有更高的灵敏性和准确性。技术研发人员:李杰波,李亮棠受保护的技术使用者:广州晓云智慧科技有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/315280.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表