-
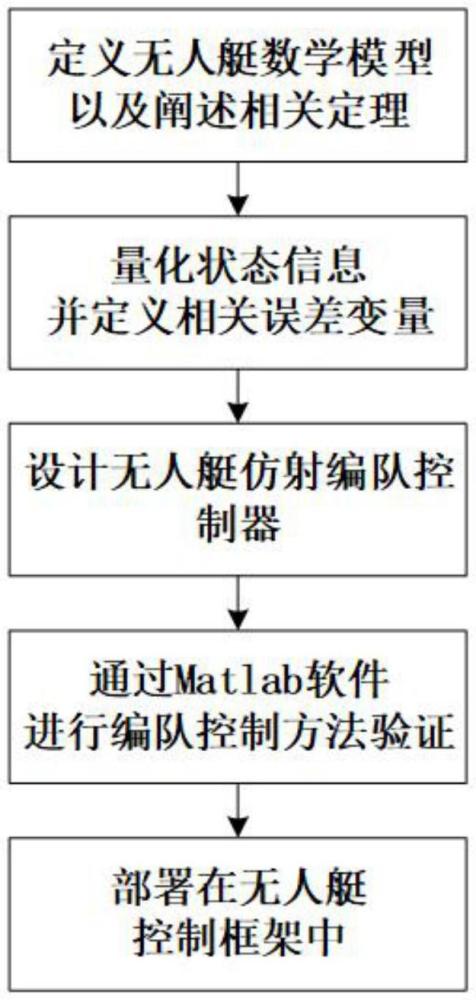
状态量化的分布式无人艇队形变换编队控制方法
本发明涉及的是一种无人设备控制领域的技术,具体是一种状态量化的分布式无人艇队形变换编队控制方法。背景技术:1、现有无人艇硬件系统大多数基于数字技术,这意味着在算法设计以及硬件采样过程中均以固定周期进行......
-
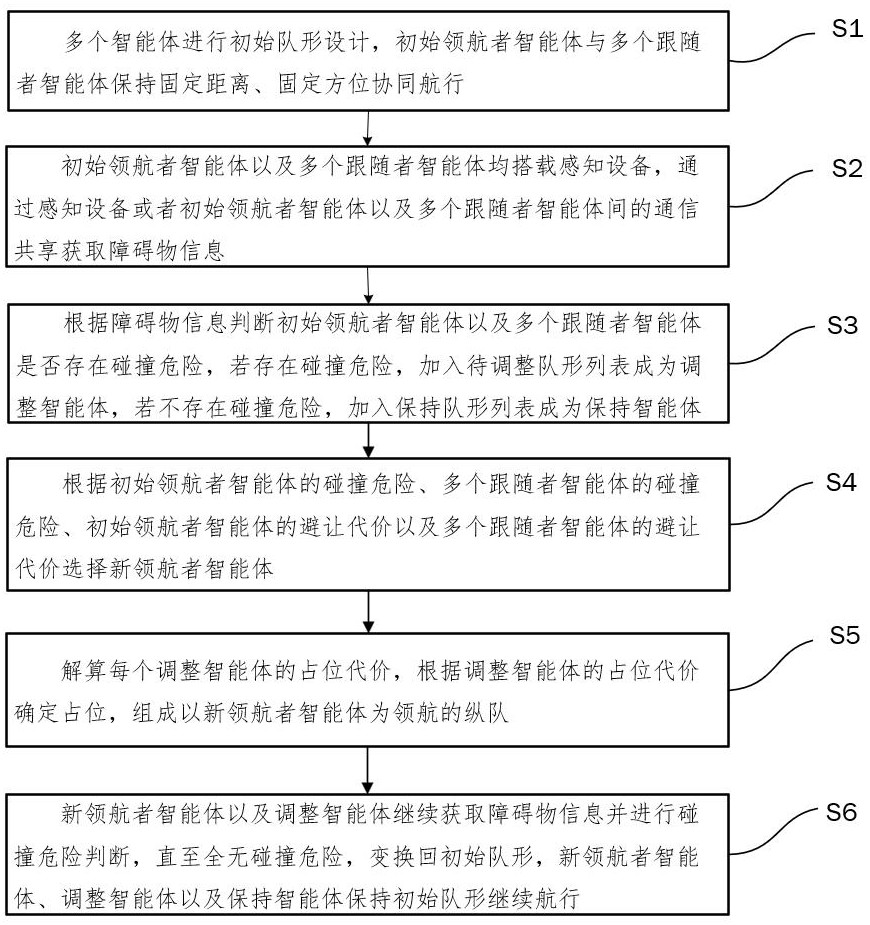
一种基于队形变换的协同避障方法与流程
本发明涉及多智能体协同控制,尤其涉及一种基于队形变换的协同避障方法。背景技术:1、协同控制与避障是多智能体进行自主航行的基础,在多障碍物的复杂场景,不仅需要考虑多智能体整体的航行安全,还需要保障内部每......
-
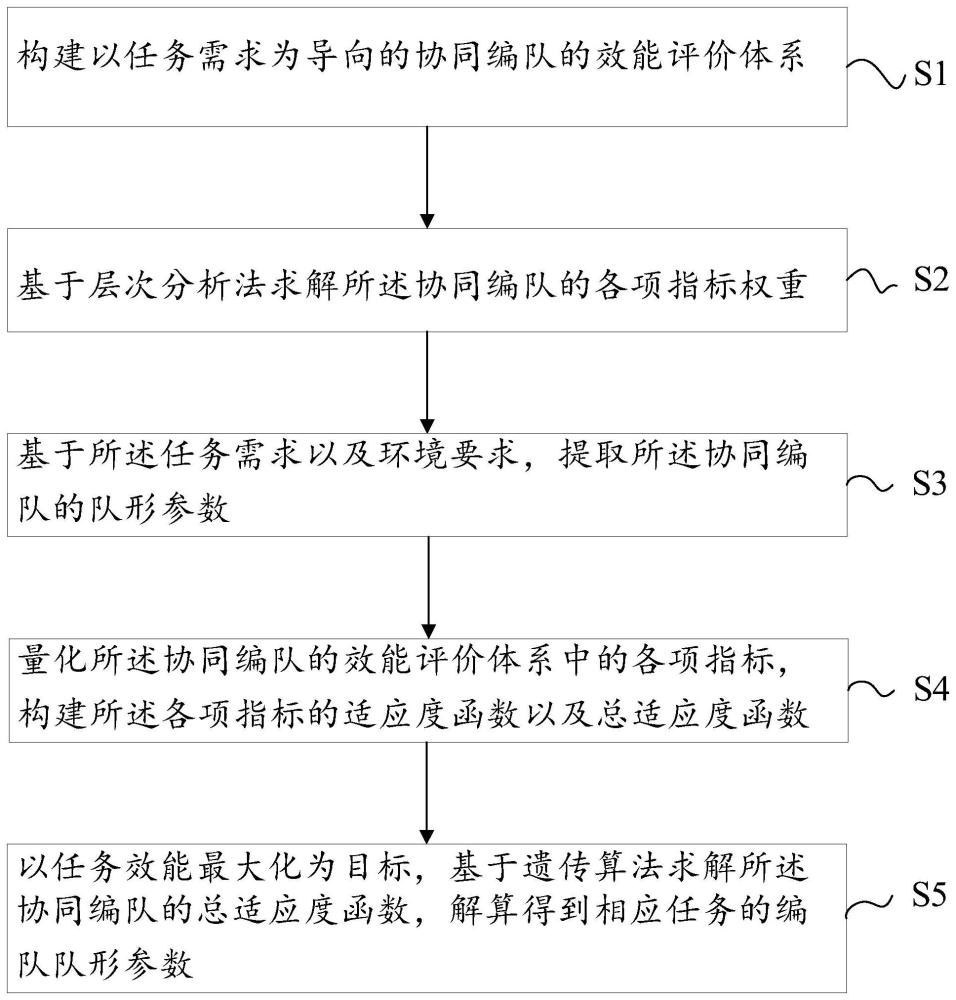
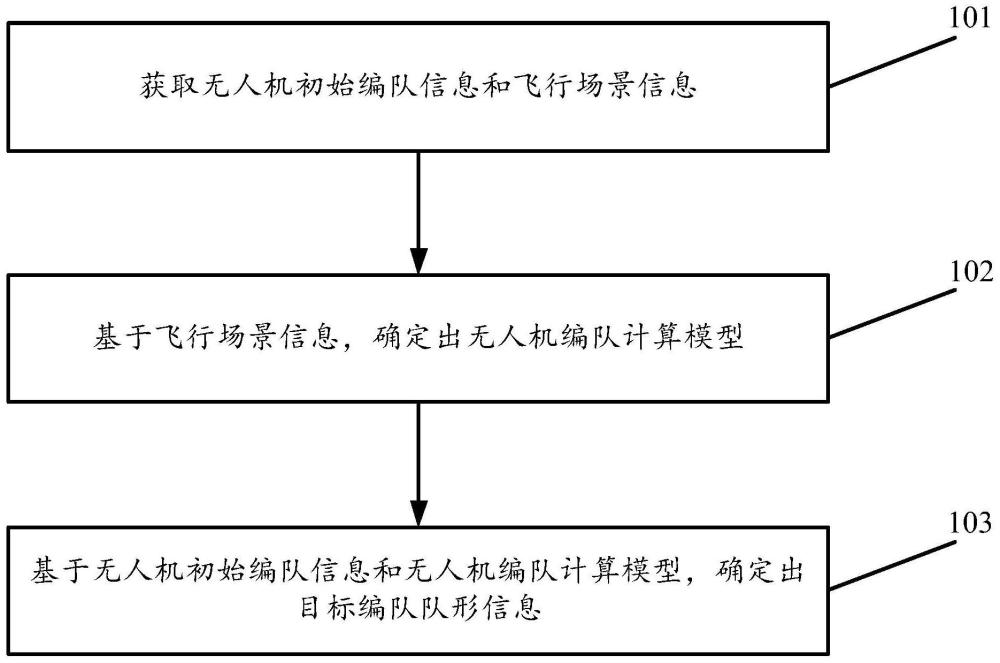
一种无人机队形设计方法、装置、设备及存储介质与流程
本申请涉及无人机编队,尤其涉及一种无人机队形设计方法、装置、设备及存储介质。背景技术:1、近年来,无人机编队系统的协同问题因其在军事领域具有越来越重要的意义从而吸引了大量学者进行研究,并取得了一些成果......
-
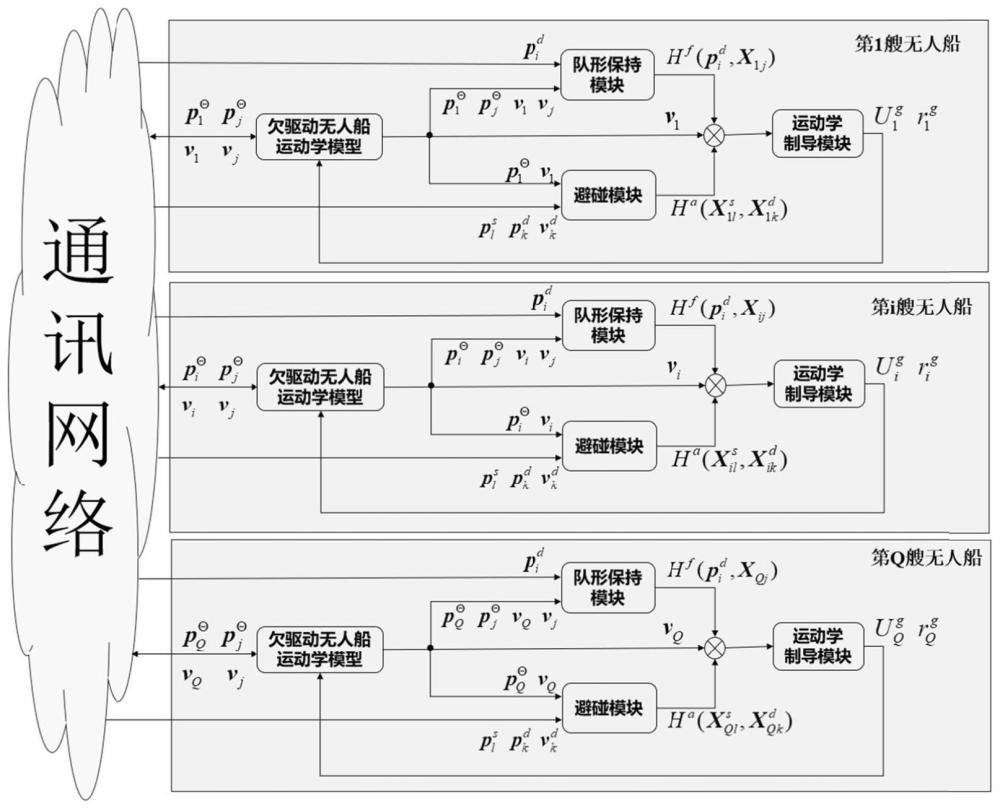
一种规避障碍物的无人船集群队形保持制导控制器
本发明涉及无人船集群运动控制,具体而言,尤其涉及一种规避障碍物的无人船集群队形保持制导控制器。背景技术:1、21世纪以来,随着海洋资源的开发与利用日益受到重视,无人船逐渐成为研究的热点。由于其在海洋探......
-
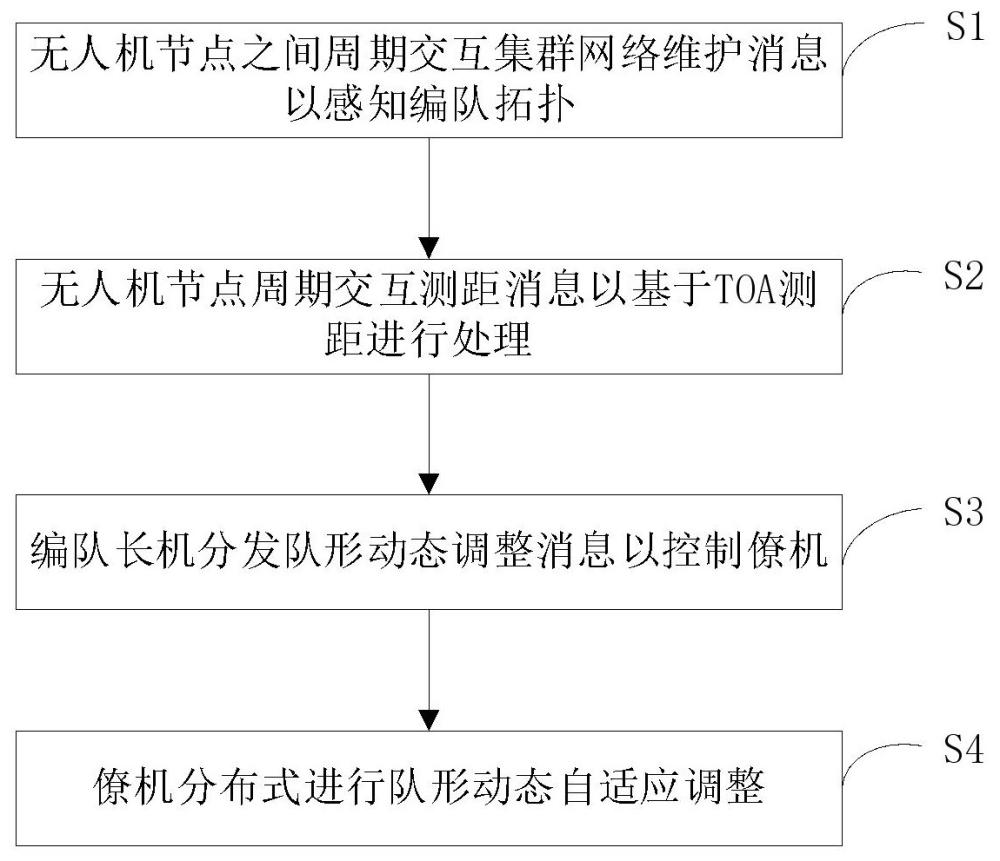
基于测距的无人机集群分布式编队队形自适应控制方法与流程
本发明涉及无人机集群通信,特别是一种基于测距的无人机集群分布式编队队形自适应控制方法。背景技术:1、在无人机集群组网编队应用场景中,无人机以多个编队方式组成任务群,采用与集群任务相匹配的群编队拓扑控制......
-
一种无人机编队队形控制方法及装置
本发明涉及无人机,尤其涉及一种无人机编队队形控制方法及装置。背景技术:1、随着智能控制技术的发展和进步,无人机也越来越多地进入到人们的视野之中。随着任务难度的不断提升,人们对无人机的要求也随之增加。单......
-
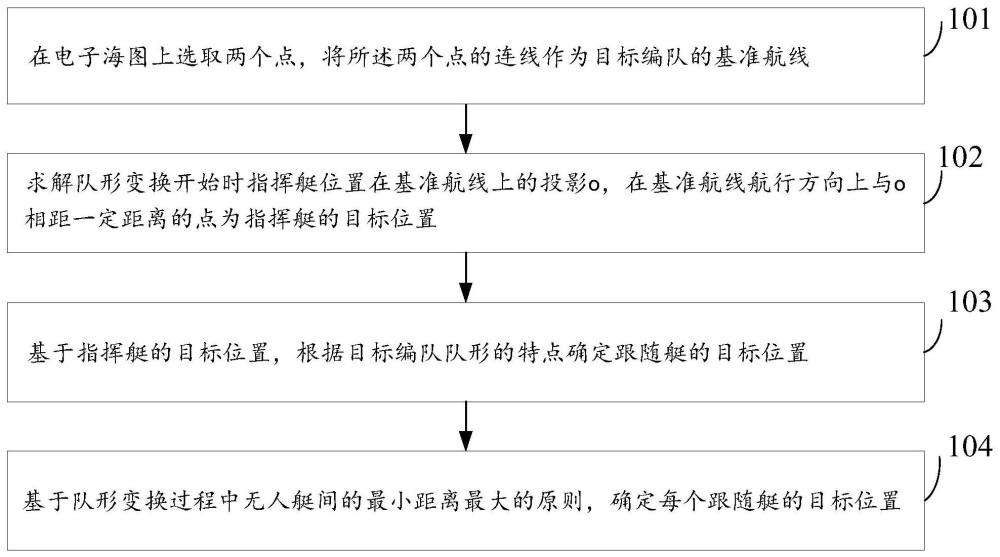
一种无人艇编队队形变换方法及装置与流程
本发明属于无人艇编队,具体涉及一种无人艇编队队形变换方法及装置。背景技术:1、中国海岸线总长度超过3.26万km,这意味中国拥有大量的海洋资源。海洋成为中国未来发展的重点领域。海洋智能装备是迈向海洋强......
技术新讯 > 队形 > 列表
 2024-11-19
2024-11-19精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01