一种基于队形变换的协同避障方法与流程
- 国知局
- 2024-11-06 14:42:50
本发明涉及多智能体协同控制,尤其涉及一种基于队形变换的协同避障方法。
背景技术:
1、协同控制与避障是多智能体进行自主航行的基础,在多障碍物的复杂场景,不仅需要考虑多智能体整体的航行安全,还需要保障内部每个智能体的航行安全,在避让障碍物时,存在智能体间避让决策耦合导致的不协调问题,多智能体协同避障难度大,环境适应性不强。
技术实现思路
1、本发明旨在至少解决相关技术中存在的技术问题之一。为此,本发明提供一种基于队形变换的协同避障方法,可以有效解决多智能体协同避障难度大的问题,使得多智能体可以安全灵活地避让危险障碍,适应多障碍物的复杂场景,实现整体对航行方向出现的障碍物的安全避让,避免智能体各自避让导致的连锁偏航或决策不协调问题,高效提升多智能体整体的避障能力。
2、本发明提供一种基于队形变换的协同避障方法,包括:
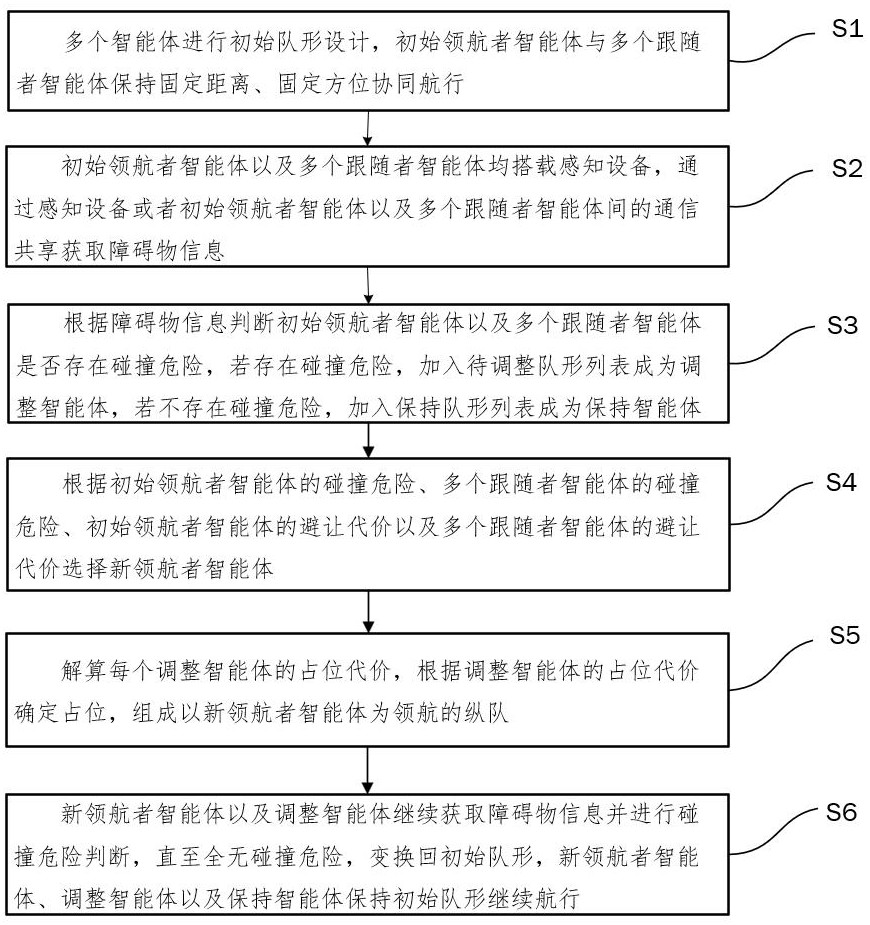
3、s1:多个智能体进行初始队形设计,初始领航者智能体与多个跟随者智能体保持固定距离、固定方位协同航行;
4、s2:初始领航者智能体以及多个跟随者智能体均搭载感知设备,通过感知设备或者初始领航者智能体以及多个跟随者智能体间的通信共享获取障碍物信息;
5、s3:根据障碍物信息判断初始领航者智能体以及多个跟随者智能体是否存在碰撞危险,若存在碰撞危险,加入待调整队形列表成为调整智能体,若不存在碰撞危险,加入保持队形列表成为保持智能体;
6、s4:根据初始领航者智能体的碰撞危险、多个跟随者智能体的碰撞危险、初始领航者智能体的避让代价以及多个跟随者智能体的避让代价选择新领航者智能体;
7、s5:解算每个调整智能体的占位代价,根据调整智能体的占位代价确定占位,组成以新领航者智能体为领航的纵队;
8、s6:新领航者智能体以及调整智能体继续获取障碍物信息并进行碰撞危险判断,直至全无碰撞危险,变换回初始队形,新领航者智能体、调整智能体以及保持智能体保持初始队形继续航行。
9、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述s4步骤中还包括,若初始领航者智能体存在碰撞危险,判断所有跟随者智能体是否存在无碰撞危险智能体;
10、若存在无碰撞危险智能体,选择离初始领航者智能体最近的无碰撞危险智能体为新领航者智能体;
11、若不存在无碰撞危险智能体,计算初始领航者智能体和所有跟随者智能体的避让代价,选择避让代价最小的智能体为新领航者智能体。
12、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述s4步骤中,利用代价函数计算初始领航者智能体和所有跟随者智能体的避让代价,代价函数计算表达式为:
13、
14、其中,为代价函数,为转向角,为速度大小变化量,为距离,为转向角的代价系数,为速度大小变化量的代价系数,为距离的代价系数。
15、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述s4步骤中还包括,若初始领航者不存在碰撞危险,选择初始领航者智能体为新领航者智能体。
16、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述s5步骤还包括,确定纵队成员数量,根据纵队成员数量以及有效间距确定占位位置。
17、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述s5步骤还包括,根据所述占位位置,解算每个调整智能体前往所述占位位置的占位代价,选择代价最小的调整智能体前往所述占位位置,按照所述占位位置的先后顺序,完成所有调整智能体的占位。
18、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述s5步骤中,调整智能体的占位代价计算表达式为:
19、
20、其中,为占位数,为调整智能体数,为第个智能体前往第个占位的占位代价,为与占位位置的距离的代价系数,为与占位位置的转向角的代价系数,为与占位位置的距离,与占位位置的转向角。
21、根据本发明提供的一种基于队形变换的协同避障方法,还包括所述障碍物信息包括静态障碍物信息和动态障碍物信息。
22、本发明实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:本发明针对多智能体协同避障问题,提出一种基于队形变换的协同避障方法,在判断多智能体整体航行时存在碰撞危险时,采取队形变换的方式重新分配占位以实现整体的安全通航,从而提升多智能体的安全性和环境适应性。本发明方法简单,容易实现,且能够避免各智能体自主决策导致的行动不协调问题,且仅对存在碰撞危险的智能体进行队形变换,大大降低智能体间的行动影响,且更大程度地为任务完成度提供技术保障。可以有效解决多智能体协同避障难度大的问题,使得多智能体可以安全灵活地避让危险障碍,适应多障碍物的复杂场景,实现整体对航行方向出现的障碍物的安全避让,避免智能体各自避让导致的连锁偏航或决策不协调问题,高效提升多智能体整体的避障能力。
23、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种基于队形变换的协同避障方法,其特征在于,包括:
2.根据权利要求1所述的一种基于队形变换的协同避障方法,其特征在于,所述s4步骤中还包括,若初始领航者智能体存在碰撞危险,判断所有跟随者智能体是否存在无碰撞危险智能体;
3.根据权利要求1所述的一种基于队形变换的协同避障方法,其特征在于,所述s4步骤中,利用代价函数计算初始领航者智能体和所有跟随者智能体的避让代价,代价函数计算表达式为:
4.根据权利要求1所述的一种基于队形变换的协同避障方法,其特征在于,所述s4步骤中还包括,若初始领航者不存在碰撞危险,选择初始领航者智能体为新领航者智能体。
5.根据权利要求1所述的一种基于队形变换的协同避障方法,其特征在于,所述s5步骤还包括,确定纵队成员数量,根据纵队成员数量以及有效间距确定占位位置。
6.根据权利要求5所述的一种基于队形变换的协同避障方法,其特征在于,所述s5步骤还包括,根据所述占位位置,解算每个调整智能体前往所述占位位置的占位代价,选择代价最小的调整智能体前往所述占位位置,按照所述占位位置的先后顺序,完成所有调整智能体的占位。
7.根据权利要求1所述的一种基于队形变换的协同避障方法,其特征在于,所述s5步骤中,调整智能体的占位代价计算表达式为:
8.根据权利要求1所述的一种基于队形变换的协同避障方法,其特征在于,所述障碍物信息包括静态障碍物信息和动态障碍物信息。
技术总结本发明涉及多智能体避障技术领域,提供一种基于队形变换的协同避障方法,多个智能体进行初始队形设计,初始领航者智能体与多个跟随者智能体保持固定距离、固定方位协同航行;通过搭载的感知设备获取障碍物信息;根据障碍物信息判断初始领航者智能体及多个跟随者智能体是否存在碰撞危险,选取新领航者;解算调整智能体的占位代价,根据占位代价确定占位,组成以新领航者为领航的纵队;继续获取障碍物信息并进行碰撞危险判断,直至全无碰撞危险,变换回原队形航行。本发明采用变动尽量小的队形变换方案,以实现整体对航行方向出现的障碍物的安全避让,避免智能体各自避让导致的连锁偏航或决策不协调问题,高效提升多智能体整体的避障能力。技术研发人员:房媛媛,但杨文,宋晔,于双宁受保护的技术使用者:中国船舶集团有限公司第七零七研究所九江分部技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/323693.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表