一种电力巡检无人机安全航线的规划方法及控制系统与流程
- 国知局
- 2024-11-06 14:42:17
本发明涉及一种无人机航线的规划方法及控制系统,特别涉及一种电力巡检无人机安全航线的规划方法及控制系统,属于无人机巡检。
背景技术:
1、随着国民经济的跨越式增长,对能源的需求越来越大,因此电网的规模不断扩大。电力是社会各行各业不可或缺的能源,电力系统一旦发生故障会给国家和社会带来难以估量的损失。
2、目前我国的电力系统仍是由发电、输电、变电、配电等环节构成,其中保障输电线路的可靠性是智能电网建设的重要内容,现实生活中,输电线路需要穿越各种复杂的地理环境,如经过大面积水库、湖泊和崇山峻岭等,这些都给电力线路的检测带来了很多困难。特别是对于电力线路穿越原始森林边缘地区、高海拔、冰雪覆盖区以及沿线存在频繁滑坡、泥石流等地质灾害,大部分地区山高坡陡,交通和通讯极不发达时,如何解决电力线路的日常检测,提高检测精度和效率,成为困扰电力行业的一个重大难题。
3、在电力线路巡检领域,以手工图纸作业为主的传统生产运行管理方法,仅仅依靠线路运行维护人员徒步进行地面巡视,不仅劳动强度和风险大,而且效率低下,某些情况下不能及时发现或消除存在的缺陷,信息不能及时、有效、准确地传递,往往会延误缺陷处理和事故抢修,给生产运行管理人员准确及时地掌握电网的运行状况带来了困难。随着科技发展,无人机巡检的方式逐渐代替了人工巡检的方法。无人机巡检的方法主要分为固定翼巡检和多旋翼巡检,其中,多旋翼巡检主要是以无人机飞行员操控无人机对电力线路进行拍照,找出隐患点。然而,无人机飞行员操控无人机的方式还是存在一些弊端:比如巡检效率不高、人为操作失误造成坠机甚至破坏输电设备等情况。
4、中国专利cn 110134143 a公开了一种电力巡检方法、系统及电子设备和存储,该方法包括:获取通过预设接口导入的待巡检的所有杆塔坐标;根据所述所有杆塔坐标生成巡检路线;获取每个航点的海拔高度,得到飞行高度;利用所述巡检路线和所述飞行高度自动生成巡检航线,并控制无人机按照所述巡检航线进行电力巡检。
5、但是该方法未考虑无人机巡检过程中风力、风向和环境温度等环境因素对无人机航线的影响,以及无人机与网电安全距离的要求,无人机与电力线路的安全距离要求因电力线路的电压等级和特定情况而不同,通常电网周围会产生强烈的电磁干扰,会影响巡检无人机的电子设备,严重时会造成无人机失控坠毁。例如:无人机飞行过程中需要与10千伏高压线路保持6米以上的安全距离。
6、但是为了确保巡检数据的准确性,就需要近距离多角度地对目标线路进行巡检,目前无人机的巡检航线均为点到点直线飞行巡检航线,容易造成巡检过程中图像数据不清晰甚至漏检的现象。
技术实现思路
1、发明目的:本发明的目的在于克服上述技术不足,提供一种电力巡检无人机安全航线的规划方法及控制系统,在综合考虑无人机续航里程和巡检过程中风力、风向以及电网电磁干扰等因素进行安全航线的规划方法和控制系统,能够确保巡检数据的准确性同时提高无人机的巡航的安全性。
2、技术方案:一种电力巡检无人机安全航线的规划方法,包括以下步骤:
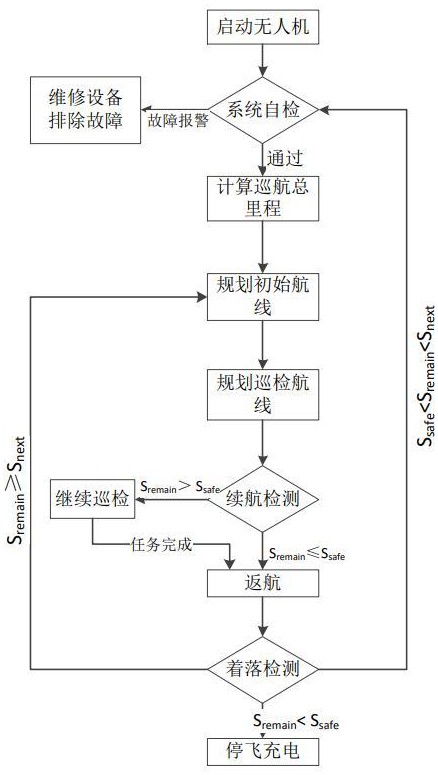
3、步骤一、启动无人机,机载控制系统自检确认设备正常,计算当前续航里程,获取当前起始坐标,自检通过后进入步骤二;否则,设备维修排除故障;
4、步骤二、计算巡航总里程,录入所有待巡检的杆塔坐标,后台控制系统计算起始坐标至最近杆塔坐标之间的直线距离以及相邻杆塔之间的直线距离,起飞坐标至最近杆塔坐标之间的直线距离和相邻杆塔之间的直线距离之和为巡航距离,根据巡航距离计算往返里程,在往返里程的基础上乘以安全系数得到巡航总里程;
5、步骤三、规划初始航线,根据无人机当前续航里程和巡航总里程确认初始航线;当巡航总里程小于无人机当前续航里程时,确认初始航线,进入步骤四;当巡航总里程大于无人机当前续航里程时,减少待巡检的杆塔数量重新计算巡航总里程,直至巡航总里程小于无人机当前续航里程,确认初始航线,进入步骤四;
6、步骤四、规划巡检航线,无人机飞抵最近杆塔,根据安全距离规划巡检航线;
7、步骤五、续航检测,实时检测当前续航里程和当前坐标,若当前续航里程减去当前坐标与起始坐标之间距离之差小于安全续航里程时立即返航;若当前续航里程减去当前坐标与起始坐标之间距离之差大于安全续航里程,则继续巡检直至完成确认的初始航线的飞行任务,进入步骤六;
8、步骤六、返航,根据当前坐标和起始坐标规划返航航线;
9、步骤七、停机检测,返航着落后,系统检测无人机的剩余续航里程,若剩余续航里程小于等于步骤五中安全续航里程,则返航进入步骤八;若剩余续航里程大于步骤五中安全续航里程同时小于本次巡航总里程,则返回步骤三重新规划初始航线;若剩余续航里程大于本次的巡航总里程,则返回步骤一重新开始;
10、步骤八、停飞充电。
11、本发明根据无人机续航里程结合所有待巡检杆塔的坐标规划初始航线;然后再根据线缆输送的电压值选择安全距离,在确保现场巡检航线不小于安全距离进行巡检,并且需要根据巡检要求规划巡检模式,巡检模式分为简单巡检模式和螺旋绕行模式,简单巡检模式是完全按照线缆走向飞行;螺旋绕行模式是指巡检过程中沿线缆延伸线路螺旋向前飞行;巡检过程中需要实时检测当前续航里程和当前坐标,确保无人机能够安全返航,因为巡航过程中会受到风力和温度影响导致续航里程无法满足实际巡检飞行的需要,风力过大无人机会不断修正航线,因此会导致剩余续航里程减少,环境温度也会导致剩余续航里程的减少,因此为了确保无人机安全飞行需要实时监控当前续航里程;无人机会在剩余续航里程不足或者完成当前巡检任务后返航;返航着落后会再次检测剩余续航里程,根据剩余续航里程重新规划巡检航线,如果剩余续航里程不足则停飞充电,结果巡检任务。
12、本发明在综合考虑无人机续航里程和巡检过程中风力、风向以及电网电磁干扰等因素进行安全航线的规划,能够确保巡检数据的准确性同时提高无人机的巡航的安全性。
13、优选项,为了准确计算巡航总里程,所述步骤二中计算巡航总里程的方法如下:
14、s2.1、录入所有待巡检的杆塔坐标,包括每个杆塔的经度、纬度和塔高以及待巡检的杆塔数量;
15、s2.2、计算巡航距离,根据起始坐标选定最近的杆塔并根据其塔高计算初始飞行距离,然后从最近的杆塔开始分别根据各自经度和纬度依次计算各杆塔之间的直线距离并求和获得有效巡检距离,初始飞行距离与有效巡检距离之和为巡航距离;
16、s2.3、计算返航距离,根据最后一个待巡检的杆塔经度和纬度与起始坐标之间的距离计算了返航距离;
17、s2.4、计算往返里程,巡航距离与返航距离之和为往返里程;
18、s2.5、计算巡航总里程,在往返里程的基础上乘以安全系数得到巡航总里程。
19、优选项,为了进一步提高无人机巡检的安全性,所述安全系数不小于1.5。由于实际巡检过程中会受到风力和环境温度的影响,为了提高飞行的安全性,安全系数至少需要设定为1.5以上。
20、优选项,为了进一步提高航线规划的可靠性,所述步骤三中当巡航总里程大于无人机当前续航里程时,减少待巡检的杆塔数量重新计算巡航总里程,从距离起始坐标最远的杆塔开始逐个减少,每减少一个重新计算一次同时与当前续航里程比较一次,直至巡航总里程小于无人机当前续航里程,确认新的初始航线。
21、当需要巡检的杆塔数量较多时,单次巡检无法实现,就需要根据无人机的续航里程合理规划单次巡检的杆塔数量,分多次进行巡检;可以最大限度的利用无人机的续航能力实现最多杆塔的巡检,提高了巡检效率。
22、优选项,为了进一步精确规划巡检航线,所述步骤四中规划巡检航线的方法如下:
23、s4.1、获取线路输送的电压值,系统获取待巡检线路输送的电压值;
24、s4.2、根据电压值选择安全距离值,系统根据获取的电压值查询标准选择对应的安全距离值;
25、s4.3、规划杆塔的巡检航线,无人机上升至输电设备所在高度,以输电设备为中心,同时以不小于安全距离值为半径盘旋飞行,并将飞行参数与对应巡检图像实时传回后台控制系统;盘旋飞行过程中与线缆也需要保持安全距离;为了后期对故障位置进行复检需要记录当前飞行参数,飞行参数包括当前的经度、纬度、高度以及与巡检目标的相对位置;
26、s4.4、规划相邻杆塔间线缆的巡检航线,无人机与线缆保持不小于安全距离值沿线缆延伸线路飞行,并将飞行参数与对应巡检图像实时传回后台控制系统。
27、优选项,为了提高巡检准确性,所述步骤s4.4中规划相邻杆塔间线缆的巡检航线时,飞行航线为与线缆保持不小于安全距离值沿线缆延伸线路螺旋向前飞行。
28、需要根据巡检要求规划巡检模式,巡检模式分为简单巡检模式和螺旋绕行模式,简单巡检模式是完全按照线缆走向飞行;螺旋绕行模式是指巡检过程中沿线缆延伸线路螺旋向前飞行。螺旋绕行模式能够多角度对线缆进行巡检,能够提高巡检准确性。
29、优选项,为了进一步提高巡检效果,相邻杆塔间线缆的巡检航线过程中,无人机巡检同时检测与线缆之间的距离,整个巡检过程中保持无人机与线缆之间的距离一致。无人机巡检过程中无法避免地会受到风力的影响,导致偏离航线,会影响巡检图像采集设备的数据采集,因此,在偏离航线时需要及时纠正航线确保整个巡检过程中保持无人机与线缆之间的距离一致。
30、一种实现电力巡检无人机安全航线的规划方法的控制系统,包括无人机总成和后台控制系统,所述无人机总成与后台控制系统通过通讯接口进行无线连接,
31、无人机总成包括机载控制系统、电池系统、定位装置、测距雷达和图像采集装置,机载控制系统分别与电池系统、定位装置、测距雷达和图像采集装置信号连接;
32、机载控制系统通过电池系统获取当前续航里程,
33、机载控制系统通过定位装置获取当前起始坐标,
34、机载控制系统通过测距雷达检测与待测杆塔和待测线缆的实际距离,
35、机载控制系统通过图像采集装置采集待测杆塔和待测线缆的图像数据并通过通讯接口传回至后台控制系统;
36、后台控制系统包括数据录入模块、计算模块、存储模块和输出模块,
37、数据录入模块录入所有待巡检的杆塔坐标以及待巡检线路的电压值,
38、计算模块根据录入的所有待巡检的杆塔坐标计算巡航总里程,
39、存储模块存储图像采集装置采集待测杆塔和待测线缆的图像数据以及对应的飞行参数,并且将图像数据传输给计算模块,图像数据经过计算模块处理分析将故障数据传输给输出模块,
40、输出模块将故障数据输出并存储至存储模块。
41、有益效果:本发明在综合考虑无人机续航里程和巡检过程中风力、风向以及电网电磁干扰等因素进行安全航线的规划,能够确保巡检数据的准确性同时提高无人机的巡航的安全性。当需要巡检的杆塔数量较多时,单次巡检无法实现,就需要根据无人机的续航里程合理规划单次巡检的杆塔数量,分多次进行巡检;可以最大限度的利用无人机的续航能力实现最多杆塔的巡检,提高了巡检效率。螺旋绕行模式能够多角度对线缆进行巡检,能够提高巡检准确性。
本文地址:https://www.jishuxx.com/zhuanli/20241106/323628.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。