一种规避障碍物的无人船集群队形保持制导控制器
- 国知局
- 2024-08-01 00:14:51
本发明涉及无人船集群运动控制,具体而言,尤其涉及一种规避障碍物的无人船集群队形保持制导控制器。
背景技术:
1、21世纪以来,随着海洋资源的开发与利用日益受到重视,无人船逐渐成为研究的热点。由于其在海洋探测、水文监测、区域巡逻等领域的独特优势,受到广泛的关注。而面对一些任务时,单条无人船的能力有限,需要多条无人船的协同合作。无人船集群可以相互协同,共同完成较为复杂的任务,提高整体的工作效率和可靠性。然而,在实际运行中,无人船集群常常会遇到各种障碍物,如礁石、浮标、其他船只等。这些障碍物可能会对集群的安全和性能造成威胁,破坏原有的队形,甚至导致整个集群的失效。因此,如何有效地规避这些障碍物,保持集群队形,是一个亟待解决的问题。
2、国内外对无人船集群制导方法的研究虽然取得了一定的成果,但仍存在以下不足:
3、第一,现有的无人船集群制导方法一旦遇到障碍物,往往无法灵活规避,容易造成队形的破坏,甚至导致集群中部分无人船损坏。一些基于领导者的集群制导方法只考虑了领导者的避碰避障,而其他无人船的避碰避障效果不佳,即使考虑了跟随者的避碰行为,也存在队形被破坏的可能性。
4、第二,现有的无人船集群制导方法多采用基于全路径导引的策略,为每艘无人船规划单独的路径,但由于其是从个体角度进行考虑,很可能造成资源分配不均衡,进而影响无人船集群的整体性能。
5、第三,现有的无人船集群制导方法大多只是将任务目标简单加权,未综合考虑多个目标之间的相互影响,可能无法很好的平衡各个任务目标,甚至出现互相矛盾的情况。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种规避障碍物的无人船集群队形保持制导控制器,本发明能够使无人船在集群队形的情况下规避路径上的障碍物并到达目标点。
2、本发明采用的技术手段如下:
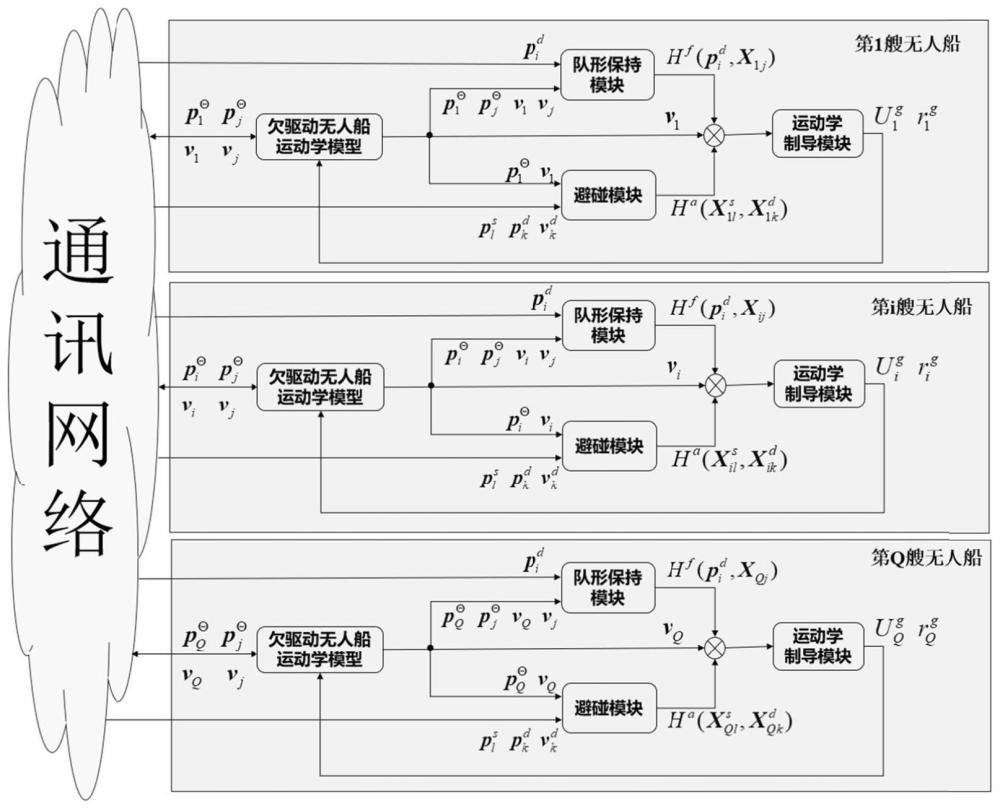
3、一种规避障碍物的无人船集群队形保持制导控制器,包括欠驱动无人船运动学模型、队形保持模块、避碰模块以及运动学制导模块;
4、所述欠驱动无人船运动学模型的输入端与所述运动学制导模块的输出端相连,所述欠驱动无人船运动学模型的输出端分别与所述队形保持模块、避碰模块以及运动学制导模块的输入端相连;
5、所述队形保持模块的输入端分别与给定目标点坐标、所述欠驱动无人船运动学模型的输出端相连,所述队形保持模块输出端与所述运动学制导模块的输入端相连;
6、所述避碰模块的输入端分别与给定障碍物信息、所述欠驱动无人船运动学模型的输出端相连,所述避碰模块输出端与所述运动学制导模块的输入端相连;
7、所述运动学制导模块的输入端分别与所述欠驱动无人船运动学模型、队形保持模块以及避碰模块的输出端相连,所述运动学制导模块输出端与所述欠驱动无人船运动学模型相连。
8、进一步地,所述欠驱动无人船运动学模型接收来自所述运动学制导模块的制导合速度信号和制导艏摇角速度信号,所述欠驱动无人船运动学模型发送第i艘欠驱动无人船变换后的位置坐标信号和在大地坐标系的速度向量信号至所述队形保持模块和所述避碰模块,发送第i艘欠驱动无人船在大地坐标系的速度向量信号至所述运动学制导模块;
9、所述队形保持模块接收来自所述欠驱动无人船运动学模型的自身无人船的变换后的位置坐标信号、集群内部其他无人船的位置坐标信号、自身速度向量信号、其他无人船的速度向量信号和来自通讯网络的目标点坐标信号,所述队形保持模块发送包含目标到达的队形保持控制输入信号至所述运动学制导模块;
10、所述避碰模块接收来自所述欠驱动无人船运动学模型的自身无人船的变换后的位置坐标信号、速度向量信号和来自通信网络的第ll个静态障碍物中心点坐标信号、第k个动态障碍物的位置坐标和速度向量信号,所述避碰模块发送避碰控制输入信号至所述运动学制导模块;
11、所述运动学制导模块接收来自所述队形保持模块的包含目标到达的队形保持控制输入信号、来自所述避碰模块的避碰控制输入信号和来自所述欠驱动无人船运动学模型的第i艘欠驱动无人船在大地坐标系的速度向量信号,所述运动学制导模块发送制导合速度信号和制导艏摇角速度信号至所述欠驱动无人船运动学模型;
12、进一步地,所述欠驱动无人船运动学模型如下:
13、
14、式中,旋转矩阵定义为:
15、
16、其中,为第i艘无人船的纵荡速度与横漂速度的合成速度,βi=arctan(vi/ui)为第i艘无人船的侧滑角,表示侧滑角βi对时间的导数;将第i艘无人船的坐标pi由质心向船首方向移动z的距离,记为为旋转矢量,pi=[xi,yi]t代表无人船在大地坐标系下的位置,ψi代表无人船的艏摇角;ui代表无人船在船体坐标系下的纵荡速度,vi代表无人船在船体坐标系下的横漂速度,ri代表无人船在船体坐标系下的艏摇角速度。
17、进一步地,所述队形保持模块的建立步骤如下:
18、定义一个势能函数vij:
19、
20、其中,为第i艘无人船和第j艘无人船之间的期望距离,rij为第i艘无人船和第j艘无人船之间的最小安全距离,rij为第i艘无人船和第j艘无人船之间的实际距离;
21、基于势能函数的控制输入定义为:
22、
23、其中,λ和μ为控制增益。
24、包含目标到达的队形保持模块如下:
25、
26、其中,q为集群中无人船的数量,ρ为控制增益。
27、进一步地,所述避碰模块如下:
28、
29、式中:
30、
31、其中,m为静态障碍物数量,n为动态障碍物的数量,为第l个静态障碍物的半径,为2维0向量;δiω(riω)∈[0,1](ω=l,k)为与第i艘无人船和第ω个障碍物之间的距离有关的混合函数,是一个平滑过渡函数;表示第i艘无人船和第ω个障碍物之间的最大距离,riω表示第i艘无人船和第ω个障碍物之间的最小安全距离,riω表示第i艘无人船和第ω个障碍物之间的实际距离;
32、系数如下:
33、
34、进一步地,所述运动学制导模块的建立步骤如下:
35、考虑速度输入的线性阻尼,第i艘无人船的加速度向量为:
36、
37、其中,为饱和函数,为设定的控制输入h的上限,ε为线性阻尼系数;
38、所述运动学制导模块如下:
39、
40、较现有技术相比,本发明具有以下优点:
41、第一,与现有的无人船集群制导方法相比,本发明所提方法对静态和动态障碍物均提供了有效的规避机制,无人船集群能够根据障碍物的位置和移动情况动态调整队形,确保在规避障碍物的同时保持有效的集群队形,避免了潜在的队形破坏,保障了无人船集群在行进过程中的安全。
42、第二,与现有的无人船集群制导方法相比,本发明利用势能函数综合控制无人船集群,使无人船之间能够相互协同,共同规避障碍物并保持有效队形,充分发挥无人船集群的优势。
43、第三,与现有的无人船集群制导方法相比,本发明将多个任务目标如避碰避障、保持队形等融合到一个统一的势能场中进行优化,避免了任务目标之间的矛盾,使得无人船集群在避障的同时保持良好的队形。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200234.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表