-
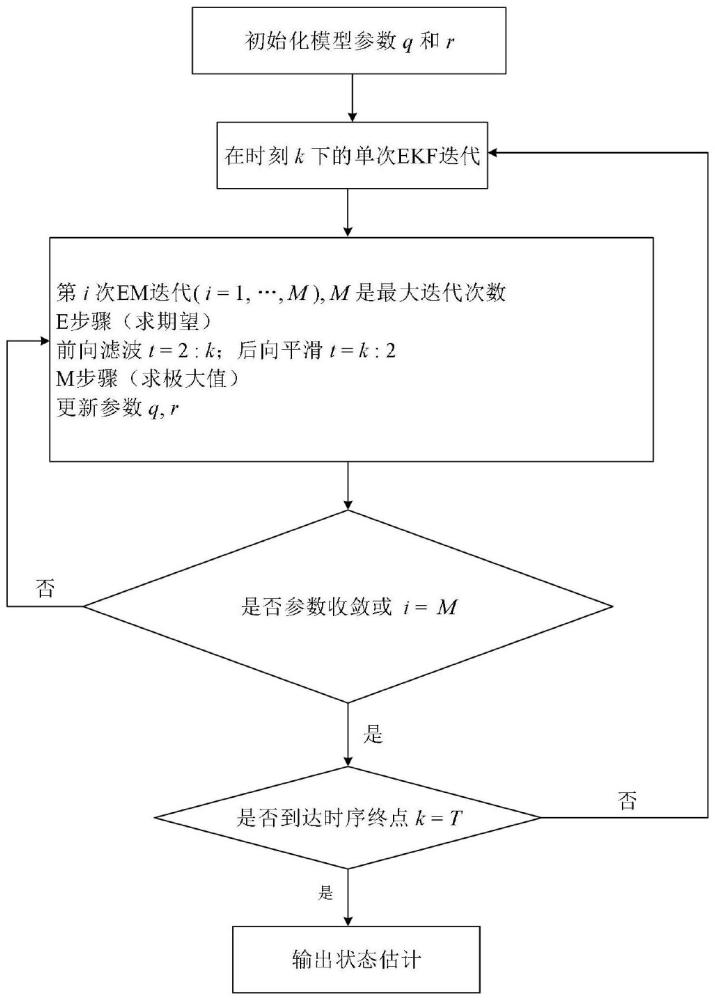
一种基于期望最大化的扩展卡尔曼滤波水下地形匹配导航方法、程序、设备及存储介质
本发明属于水下导航,具体涉及一种基于期望最大化的扩展卡尔曼滤波水下地形匹配导航方法、程序、设备及存储介质。背景技术:1、水下导航技术在海洋科学研究、商业以及民用领域中得到广泛应用,包括水下地形制图、考......
-
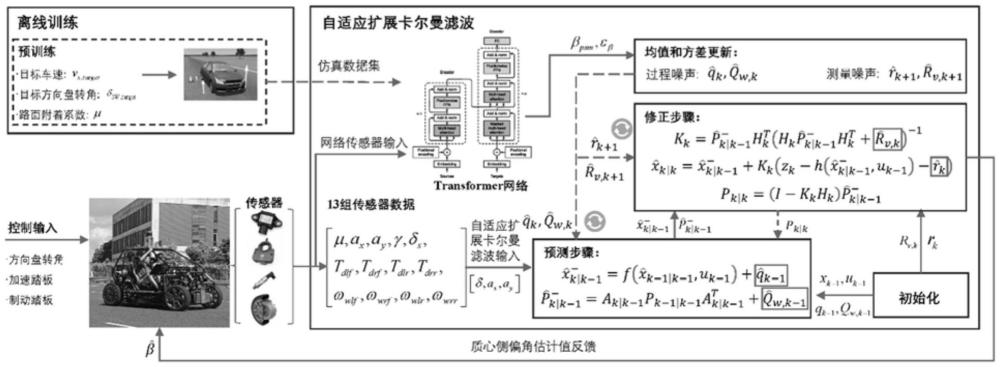
一种基于Transformer和扩展卡尔曼滤波的质心侧偏角估计方法
本发明涉及汽车控制领域,尤其是涉及一种基于transformer和扩展卡尔曼滤波的质心侧偏角估计方法。背景技术:1、车辆质心侧偏角被定义为质心速度与行驶方向的夹角,通常被用于评估车辆的横向稳定性和操控......
技术新讯 > 尔曼 > 列表
 2024-09-11
2024-09-11精选技术
-
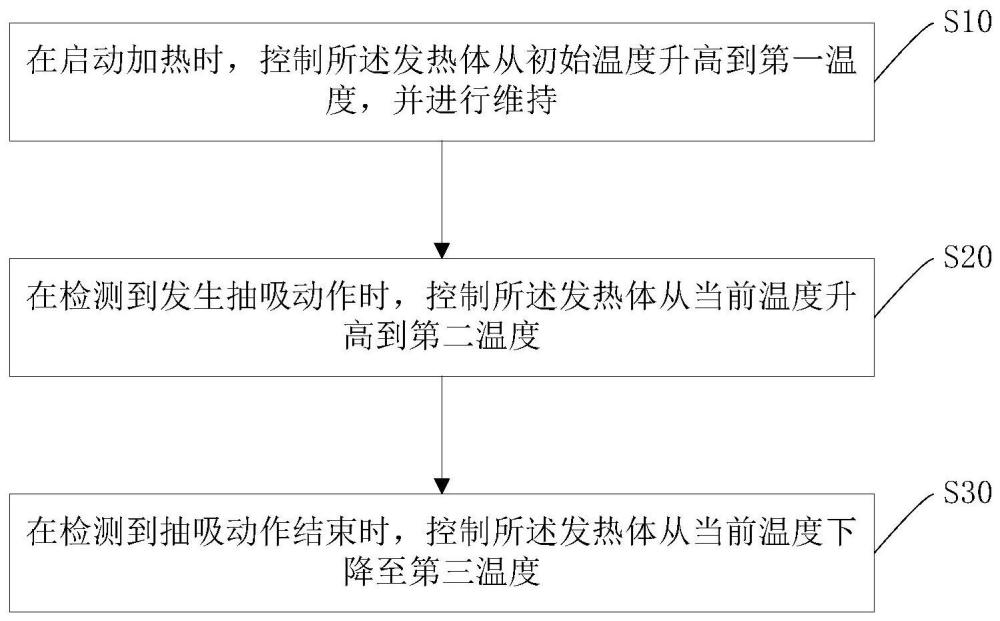
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19 -

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01