一种基于Transformer和扩展卡尔曼滤波的质心侧偏角估计方法
- 国知局
- 2024-08-30 14:30:22
本发明涉及汽车控制领域,尤其是涉及一种基于transformer和扩展卡尔曼滤波的质心侧偏角估计方法。
背景技术:
1、车辆质心侧偏角被定义为质心速度与行驶方向的夹角,通常被用于评估车辆的横向稳定性和操控性能,实时且准确地获得质心侧偏角反馈值对于车辆主动安全控制算法的有效实施具有重要意义,尤其对于自动驾驶车辆意义更为显著。然而,质心侧偏角无法通过低成本传感器获得,除非采用价格高昂的光学速度传感器或高精度运动定位全球导航卫星系统,这在量产车辆中是不可行的,因此,研究虚拟传感技术对质心侧偏角进行估计是工业界主攻方向。但是,由于轮胎的强非线性和车辆运行工况的多变性,准确估计车辆质心侧偏角仍具有挑战。
2、被广泛讨论的质心侧偏角估计算法主要分为三类,基于模型、纯数据驱动和混合方法。其中,基于模型的方法严格遵守了物理关系,具有较高的鲁棒性,但建模精度总是有限的,这限制了基于模型估计方法精度的进一步提升。与基于模型的方法相比,数据驱动的方法(如神经网络)不需要物理系统明确的先验模型,能够直接学习到从传感器信号输入和车辆质心侧偏角输出之间的非线性映射关系。纯数据驱动的方案解决质心侧偏角估计问题的能力是毋庸置疑的,值得注意的是,一方面,纯数据驱动估计方法所取得的突出结果依赖于网络离线训练数据集的建立,但想获得全工况实车数据是有困难的,尤其在一些高度危险的极限工况下,由于训练数据缺失,纯数据驱动将无法获得期望的结果。另一方面,纯数据驱动缺乏物理解释,质心侧偏角估计结果的一致性和鲁棒性与基于模型的方法相比较差。混合的方法则保留了一部分的物理可解释性以及充分利用网络的泛化性解决时变参数和不确定性带来的影响,将会是解决现有质心侧偏角估计方法不足之处的有效方案。
3、现有技术中,公开号为cn 115406446 a的中国专利公开了基于神经网络与无迹卡尔曼滤波的多轴特种车状态估计方法,该方法仅估计待估量的伪测量值,作为观测量输入到无迹卡尔曼滤波中,但其经过训练集中所不包含的s曲线工况仿真实验和实车实验验证,其难以对车辆质心侧偏角实现高精度、高鲁棒性估计,此外,采用简单全连接网络用于估计伪测量,当数据量较大时,难以提高计算效率。鉴于此,设计开发一种基于transformer和扩展卡尔曼滤波的质心侧偏角估计方法,对于提高质心侧偏角估计的准确性同时保证其鲁棒性具有重大意义。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于transformer和扩展卡尔曼滤波的质心侧偏角估计方法,通过综合利用基于模型和数据驱动估计方法的各自优势,在保留了一部分的物理可解释性下,充分利用网络的泛化性来解决时变参数和不确定性带来的影响,实现车辆质心侧偏角的高精度、高鲁棒性估计。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供一种基于transformer和扩展卡尔曼滤波的质心侧偏角估计方法,包括以下步骤:
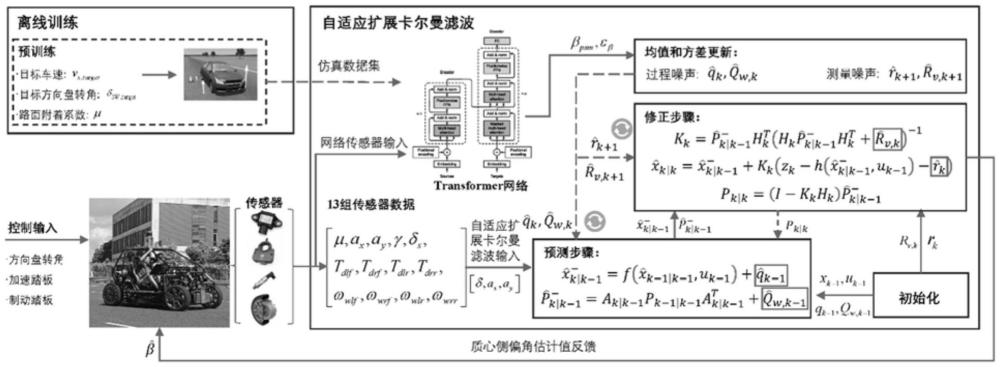
4、s1、设计车辆主动激励控制输入曲线,获取车辆传感器获得数据,并将其构建为transformer神经网络工况高覆盖度的离线训练数据集;
5、s2、将所述离线训练数据集输入transformer神经网络中,获得车辆质心侧偏角伪测量值及其相对误差预测值;
6、s3、构建七自由度车辆动力学模型,设计自适应扩展卡尔曼滤波算法;
7、s4、将所述步骤s2中质心侧偏角伪测量值和相对误差预测值自适应所述步骤s3中扩展卡尔曼滤波算法的过程和测量噪声的均值及方差,实现车辆质心侧偏角的估计。
8、所述步骤s1具体包括:
9、s11、基于车辆纵向行驶工况对车速需求,参考正弦扫频信号,设计包含车辆匀速、加速和减速的目标车速控制输入曲线;
10、s12、基于车辆横向行驶工况对方向盘转角需求,参考道路测试车辆方向盘转角频率范围和车辆动力学约束,设计可变频率和幅值的目标方向盘转角控制输入曲线;
11、s13、基于道路测试中的常规路面,对不同路面状态下的附着系数进行分类,设计目标附着系数控制输入变量;
12、s14、将上述目标车速、方向盘转角和附着系数三个维度进行有序组合,模拟车辆可能发生的主动激励条件,获得工况高覆盖度的离线训练数据集。
13、目标方向盘的转角频率与幅值的表达式为:
14、
15、
16、式中,as_max为达到车辆横向动力学约束边界的方向盘幅值,ω为此时方向盘最大角速度,fhuman_max为驾驶员转动方向盘最大频率,若转角频率fs继续增大,将等比例降低方向盘转角幅值至as_human_max。
17、所述离线训练数据集由路面附着系数、车辆纵向和横向加速度、车辆横摆角速度、方向盘转角以及车轮的转速和扭矩确定,采用如下公式表示:
18、input=[μ,ax,ay,γ,δs,ωwij,tdij];
19、其中,μ为路面附着系数,ax、ay分别为车辆纵向和横向加速度,γ为车辆横摆角速度,δs为方向盘转角,ωwij、tdij分别为四个车轮的转速和扭矩。
20、所述transformer神经网络的超参数设置如下:注意力头数为8;键序列长度为32;隐藏神经元个数为128;丢弃率为0.15。
21、所述相对误差预测值的表达式如下所示:
22、εβ=δ/βreal×100%;
23、其中,εβ为质心侧偏角相对误差的预测值,δ=βpsm-βreal为质心侧偏角的绝对误差,其中,βpsm为质心侧偏角伪测量值,βreal为质心侧偏角真值。
24、所述七自由度车辆动力学模型采用如下表达式进行表示:
25、
26、式中,车辆的基本参数包括m、iz、lf、lr和b,分别代表车辆质量、横摆运动的转动惯量、质心到前轴与后轴的距离和轮距,车辆的状态参数包括vx和vy,分别表示车辆在全局坐标系下的纵向和横向车速,δ为前轮转角,fxf和fxr分别代表前后车轴的纵向力,fyf和fyr分别代表前后车轴的侧向力,δfxf、δfyf和δfyr分别代表前后车轴左右车轮的纵向力和侧向力差值,γ为车辆横摆角速度。
27、在自适应扩展卡尔曼滤波中,过程和测量噪声的统计特性满足:
28、e[wk]=qk,cov(wk,wl)=qkδkl
29、e[vk]=rk,cov(vk,vl)=rkδkl
30、其中,w为过程噪声,v为测量噪声,q为过程噪声的均值,r为测量噪声的均值,δkl为克罗内克尔函数。
31、所述自适应扩展卡尔曼滤波算法的预测和更新的方程表达式为:
32、
33、
34、
35、
36、其中,p为协方差矩阵,k为卡尔曼增益,a和h分别为f(·)和h(·)对于状态向量x偏导数组成的雅可比矩阵,表达式为:
37、
38、所述自适应的过程表达式为:
39、
40、
41、其中,为过程噪声的均值,为测量噪声的均值,βpsm,k+1为质心侧偏角伪测量值,εβ,k+1为相对误差预测值,ξk=(1-τ)/(1-τk+1),τ为遗忘因子,取值范围是[0,1]。
42、与现有技术相比,本发明具有以下有益效果:
43、1、本发明首先提出一种车辆主动激励控制曲线设计方法,获得用于transformer网络高工况覆盖的离线训练数据集。随后,本发明利用transformer神经网络,以量产车辆易于获得的传感器数据作为输入,首次获得车辆质心侧偏角伪测量值及其相对误差预测值。之后,本发明建立七自由度车辆动力学模型,创新性设计自适应扩展卡尔曼滤波算法。最后,本发明创新性设计扩展卡尔曼滤波算法的过程和测量噪声的均值及方差的更新机制,实现车辆质心侧偏角的高精度、高鲁棒性估计。通过验证试验表明,该用于车辆质心侧偏角估计方法是合理的、可行的和有效的,对于提高质心侧偏角估计的准确性同时保证其鲁棒性具有重大意义。
44、2、本发明通过将综合目标车速、方向盘转角和道路摩擦系数三个维度进行考虑,可以实现更低的侧偏角误差,从而提高质心侧偏角估计的准确性。
45、3、本发明考虑到数据集收集成本及工况覆盖度,设计了仿真训练集输入曲线来获得更多动态特性的车辆数据。优势在于工况可重复,海量数据集获取省时省力。
46、4、本发明基于transformer神经网络,可以辨识到实车数据的时间序列特征,当数据量较大时,允许并行计算提高计算效率。
47、5、本发明除伪测量值外同时估计出伪测量值的相对误差值,该值可以反映出伪测量值的信任程度,并不直接将伪测量值输入进下一步算法中,而是根据信任程度进行折中处理,具有更准确的测量效果。
48、6、本发明根据伪测量值和相对误差值同时更新卡尔曼滤波算法中的过程和噪声误差的均值及方差,这对卡尔曼滤波算法的精度至关重要。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282390.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表