-
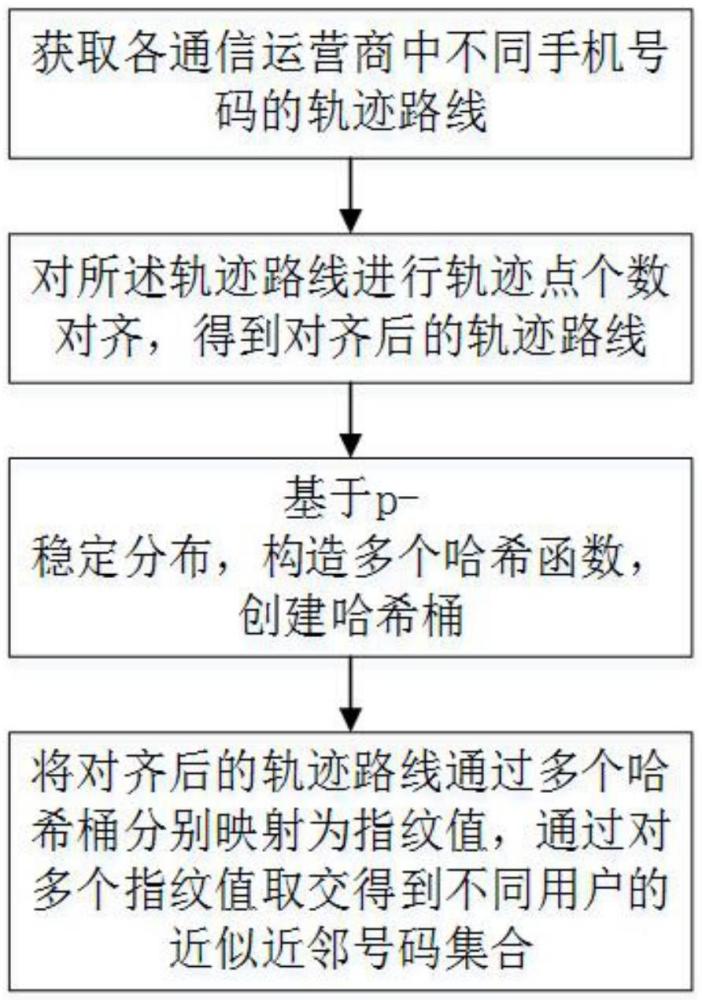
一种基于在线局部敏感哈希算法的一人多号识别方法与流程
本发明涉及移动通信大数据处理,更具体的说是涉及一种基于在线局部敏感哈希算法的一人多号识别方法。背景技术:1、随着移动通信技术的飞速发展与普及,市场上的竞争日益激烈,用户需求也日趋多样化。在这种环境下,......
-

一种人形机器人多场景下的高精度地图构建与导航方法
本发明属于机器人,具体涉及一种人形机器人多场景下的高精度地图构建与导航方法。背景技术:1、点云、栅格和拓扑是三种主要的地图表示形式,它们在人形机器人技术中发挥着关键作用。点云是由在三维空间中分布的大量......
-

一种仿人机器人多接触低质心爬行运动的轨迹跟踪方法
本发明涉及仿人机器人,具体涉及一种仿人机器人多接触低质心爬行运动的轨迹跟踪方法。背景技术:1、仿人机器人经过复杂地形是当前仿人机器人领域的热点问题。众所周知,仿人机器人是系统结构最复杂、集成度最高、与......
-

基于集中式神经网络的移动机器人多场景视觉定位方法
本发明涉及移动机器人场景视觉定位领域,特别涉及基于集中式神经网络的移动机器人多场景视觉定位方法。背景技术:1、科技的进步让采用机器人进行作业劳动成为了智能产业中不可或缺的一环,如采用机器人打扫、搬运等......
-
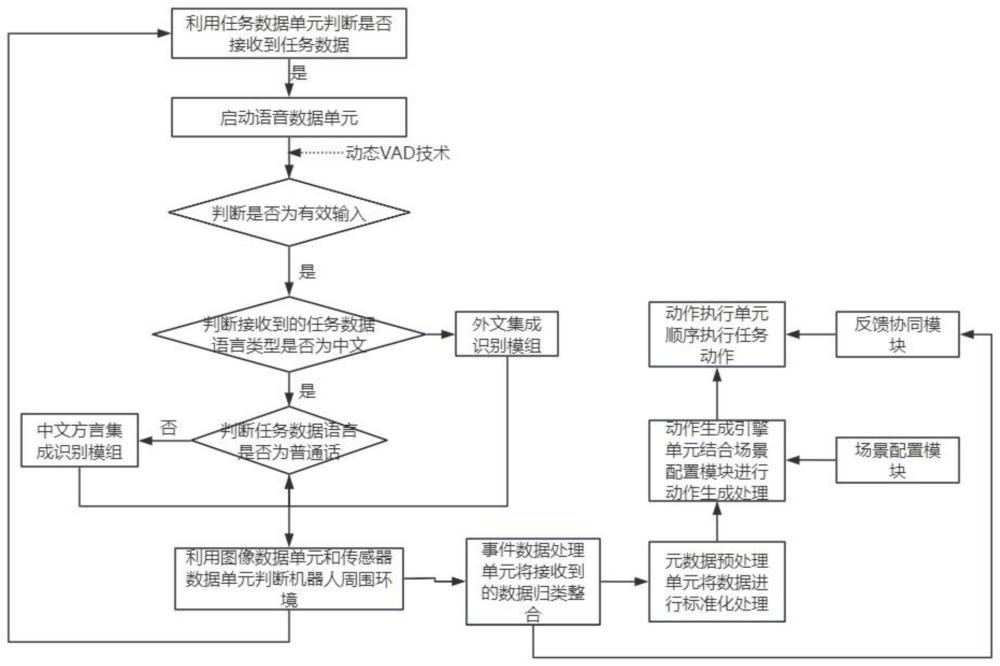
一种服务机器人多模态交互系统及方法与流程
本发明涉及的一种服务机器人多模态交互系统及方法,特别是涉及应用于机器人交互领域的一种服务机器人多模态交互系统及方法。背景技术:1、在当今快速发展的科技时代,服务机器人在多个领域中扮演着越来越重要的角色......
-

一种将人多能干细胞诱导分化为胰腺前体细胞的方法
本发明涉及生物,具体的,本发明涉及一种将人多能干细胞诱导分化为胰腺前体细胞的方法。背景技术:1、糖尿病,一种以持续高血糖为标志的全球性慢性疾病,主要由胰岛素分泌不足或对胰岛素的抵抗引起。长期的高血糖环......
技术新讯 > 人多 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
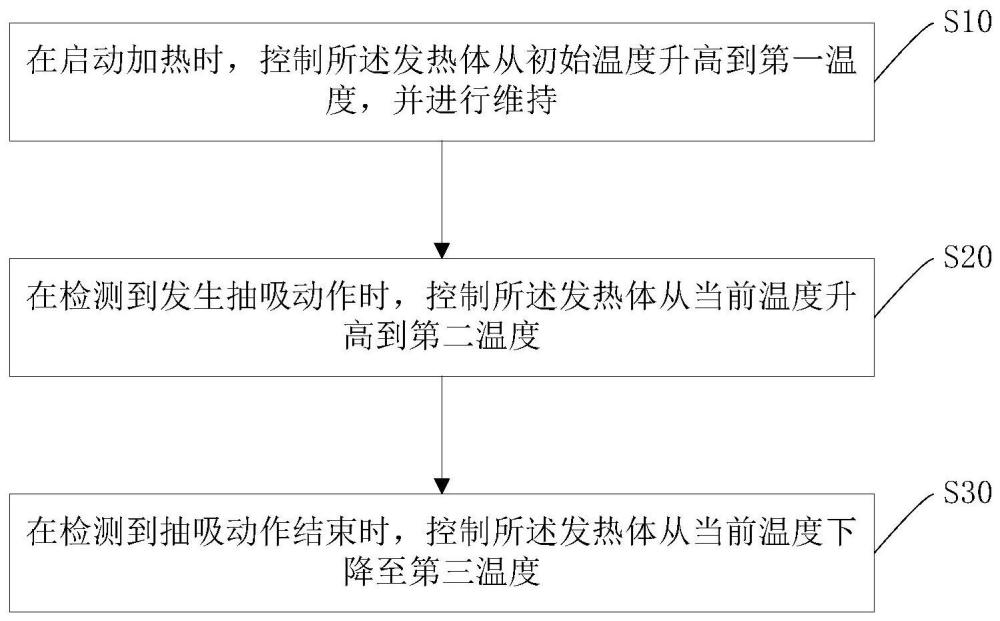
发热体、加热不燃烧装置及其加热控制方法与流程
2024-11-19