一种机器人
【技术领域】
1.本实用新型涉及机器人技术领域,特别涉及一种机器人。
背景技术:
2.目前,机器人在银行、电信营业厅及餐厅等场所具有了初步的商业应用,以满足免接触式服务的需求,而现有的商用机器人,包括提供清洁清扫、前台服务、点餐送餐等类型,具备有可供交互的交互组件和用于定位的障碍识别组件等精密部件,但在实际使用中,交互组件和障碍识别组件往往存在固定不牢,散热不佳的问题,导致机器人故障。
技术实现要素:
3.本实用新型所要解决的技术问题是现有的机器人中交互组件和障碍识别组件等结构不牢,散热不佳,导致机器人故障的问题。
4.本实用新型的目的是通过以下技术方案实现:
5.一种机器人,包括机器人主体、交互组件、障碍识别组件、第一固定组件、第二固定组件、支撑件和连接件,所述交互组件通过所述第一固定组件与所述支撑件连接,所述支撑件通过所述连接件与所述机器人主体连接,所述障碍识别组件通过所述第二固定组件与所述机器人主体连接。
6.可选地,上述的机器人,所述第一固定组件包括第一安装架、加强件和第二安装架,所述第二安装架与所述支撑件固定,所述第一安装架与所述第二安装架固定,所述交互组件固定在所述第一安装架上,所述加强件固定在所述第二安装架上。
7.可选地,上述的机器人,所述交互组件靠近所述第一安装架的一侧设有凸起的连接块,所述第一安装架具有与所述连接块配合的连接部。
8.可选地,上述的机器人,所述第一安装架上设有第一卡勾部,所述第二安装架上设有第二卡勾部,所述第一卡勾部与所述第二卡勾部卡接。
9.可选地,上述的机器人,所述第一卡勾部和第二卡勾部二者之一为公扣、二者另一为母扣。
10.可选地,上述的机器人,所述第二安装架上设有突出部,所述突出部与所述第二安装架的侧边之间形成有凹槽,所述第一安装架安装于所述凹槽内。
11.可选地,上述的机器人,所述加强件设有引导片以及末端具有弯折部的第一扣片和第二扣片,所述第二安装架、支撑件和连接件中分别设有避让孔,所述第一扣片、第二扣片和引导片依次穿设于所述第二安装架、支撑件和连接件的避让孔,所述第一扣片和第二扣片分别通过所述弯折部与所述支撑件和连接件紧扣。
12.可选地,上述的机器人,所述连接件包括至少部分表面为平面的第一安装部和至少部分表面为曲面的第二安装部,所述第二安装部与所述第一安装部的一端固定,所述第一安装部通过钣金件与所述机器人主体连接,所述第二安装部上设有用于安装所述交互组件的避让孔,所述第二安装部与所述机器人主体之间卡接。
13.可选地,上述的机器人,所述第二固定组件包括固定板件和板件支架,所述障碍识别组件固定于所述固定板件中,所述板件支架分别与所述机器人主体和固定板件连接固定。
14.可选地,上述的机器人,所述板件支架包括架体和由所述架体延伸出的若干对彼此平行的定位片,所述板件支架通过所述定位片与所述机器人主体固定,所述固定板件与板件支架的固定连接处位于彼此平行的所述定位片之间。
15.与现有技术相比,本实用新型具有如下有益效果:本实用新型机器人,包括机器人主体、交互组件、障碍识别组件、第一固定组件、第二固定组件、支撑件和连接件,所述交互组件通过所述第一固定组件与所述支撑件连接,所述支撑件通过所述连接件与所述机器人主体连接,所述障碍识别组件通过所述第二固定组件与所述机器人主体连接。
16.通过设置第一固定组件与支撑件将交互组件与机器人主体固定,设置第二固定组件将障碍识别组件与机器人主体固定,使交互组件和障碍识别组件固定牢固,提升散热能力,防止机器人故障。
【附图说明】
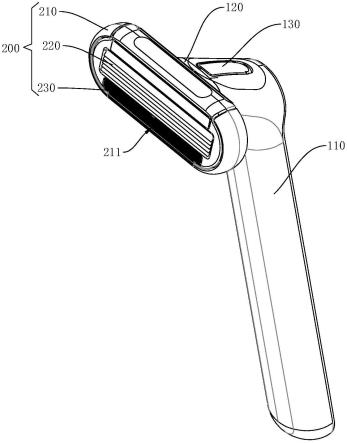
17.图1是本实用新型机器人立体图;
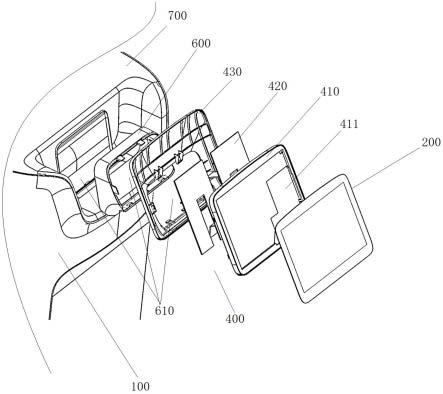
18.图2是本实用新型机器人局部分解示意图;
19.图3是本实用新型机器人第一安装架示意图;
20.图4是本实用新型机器人加强件示意图;
21.图5是本实用新型机器人第二安装架示意图;
22.图6是本实用新型机器人连接件示意图;
23.图7是本实用新型机器人第二固定组件侧视图;
24.图8是本实用新型机器人板件支架示意图。
25.图中的相关元件对应编号如下:
26.100、机器人主体,
27.200、交互组件,210、连接块,
28.300、障碍识别组件,
29.400、第一固定组件,410、第一安装架,411、连接部,412、第一卡勾部,420、加强件,421、引导片,422、第一扣片,423、第二扣片,430、第二安装架,431、第二卡勾部,432、突出部,433、凹槽,
30.500、第二固定组件,510、固定板件,520、板件支架,521、架体,522、定位片,
31.600、支撑件,610、避让孔,
32.700、连接件,710、第一安装部,720、第二安装部。
【具体实施方式】
33.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
34.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为
基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
35.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本技术中的具体含义。
36.实施例1
37.请参考图1-2,本实施例提供了一种机器人,如扫地机器人、咨询机器人、导购机器人、送餐机器人等,具体包括机器人主体100、交互组件200、障碍识别组件300、第一固定组件400、第二固定组件500、支撑件600和连接件700。机器人主体100包括有机器人的若干功能组件,如带动机器人行走的运动组件、提供电能的电源组件以及分别连接并控制上述组件的控制组件等。尤其在商用的多种场合,机器人还配置有交互组件200,用于人机交互,其包括具有人机交互功能的屏幕,如触摸屏、带有按键的屏幕等。障碍识别组件300可用于识别障碍物,利于机器人无障碍行走,其可包括拍摄障碍物的相机、感测周围障碍物的超声波/激光传感器等。交互组件200通过第一固定组件400与支撑件600连接,支撑件600通过连接件700与机器人主体100连接,障碍识别组件300通过第二固定组件500与机器人主体100连接。在本实施例中,第一固定组件400和第二固定组件500可由若干硬质结构件构成,并可连接如钣金件等散热部件,在增强固定效果的同时提高散热能力。通过设置第一固定组件400与支撑件600将交互组件200与机器人主体100固定,设置第二固定组件500将障碍识别组件300与机器人主体100固定,使交互组件200和障碍识别组件300固定牢固,提升散热能力,防止机器人故障。
38.可选地,上述的机器人,第一固定组件400包括第一安装架410、加强件420和第二安装架430。其中,第一安装架410与第二安装架430为架体521,起到连接支撑件600与交互组件200的作用;支撑件600则设于机器人主体100上,起到支撑第一安装架410与第二安装架430及其连接的交互组件200的作用;加强件420设于两个安装架之间,起到加强安装架强度的作用。具体的,第二安装架430与支撑件600固定,第一安装架410与第二安装架430固定,交互组件200固定在第一安装架410上,加强件420固定在第二安装架430上。
39.可选地,上述的机器人,请进一步参考图3,交互组件200靠近第一安装架410的一侧设有凸起的连接块210,第一安装架410具有与连接块210配合的连接部411,通过连接块210与连接部411的配合,使交互组件200与第一安装架410匹配连接。具体的,在第一安装架410中可留有部分镂空,镂空形状与第一安装架410一侧的凸起的连接块210的外轮廓形状对应,通过连接块210与镂空部分的嵌套,使交互组件200与第一安装架410连接固定。作为优选,上述镂空的形状为矩形和矩形一侧边延伸出的多边形的组合,复杂形状以提高与连接块210嵌套后,连接固定的稳定性。
40.可选地,上述的机器人,第一安装架410上设有第一卡勾部412,第二安装架430上设有第二卡勾部431,通过第一卡勾部412与第二卡勾部431卡接,使第一安装架410和第二安装架430连接固定。卡接连接的方式便于组装各安装架在内的零部件,提高机器人安装、检修效率。作为优选,第一卡勾部412和第二卡勾部431二者之一为公扣、二者另一为母扣。
41.可选地,上述的机器人,请进一步参考图5,为了增强第二安装架430与第一安装架410之间的连接强度,第二安装架430上设有突出部432,该突出部432与第二安装架430的侧边之间形成有凹槽433,第一安装架410安装于凹槽433内。
42.可选地,上述的机器人,请进一步参考图4,加强件420设有引导片421以及末端具有弯折部的第一扣片422和第二扣片423,第二安装架430、支撑件600和连接件700中分别设有避让孔610。第一扣片422、第二扣片423和引导片421依次穿设于第二安装架430、支撑件600和连接件700的避让孔610。引导片421用于引导加强件420的安装方向,防止安装误差。第一扣片422和第二扣片423分别通过弯折部与支撑件600和连接件700紧扣,使得加强件420分别与支撑件600和连接件700锁紧。弯折部的设置在便于加强件420安装的同时,防止加强件420受外力影响松脱,进而动摇交互组件200。
43.可选地,上述的机器人,请进一步参考图6,连接件700包括至少部分表面为平面的第一安装部710和至少部分表面为曲面的第二安装部720。第一安装部710的平面表面可设置麦克风、激光传感器等,第二安装部720的曲面表面可使连接件700局部凹陷以空出容置交互组件200的空间,结合曲面表面提高机器人的实用及美观度。其中,第二安装部720与第一安装部710的一端固定或一体成型。第一安装部710通过钣金件与机器人主体100连接,钣金件可设于机器人主体100与第一安装部710之间。第二安装部720上设有用于安装交互组件200的避让孔610,具体的,避让孔610开设于第二安装部720的局部凹陷处的底部。第二安装部720与机器人主体100之间则通过卡接的方式连接。
44.可选地,上述的机器人,请进一步参考图7-8,为了加固障碍识别组件300,第二固定组件500包括固定板件510和板件支架520。障碍识别组件300固定于固定板件510中,固定板件510对应所需固定的障碍识别组件300设计。板件支架520分别与机器人主体100和固定板件510连接固定,进而将障碍识别组件300固定在机器人主体100上。
45.可选地,上述的机器人,板件支架520包括架体521和由架体521延伸出的若干对彼此平行的定位片522。定位片522可以为一对、两对、三对或更多对,片数越多,定位精度和稳定性越好。板件支架520通过定位片522与机器人主体100固定,固定板件510与板件支架520的固定连接处位于彼此平行的定位片522之间。作为优选,定位片522可与机器人主体100螺丝固定。
46.以上述依据本技术的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项申请技术思想的范围内,进行多样的变更以及修改。本项申请的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。