一种基于多点视觉检测的鸟类驱散系统及方法与流程
- 国知局
- 2024-07-12 13:16:54
本发明属于机械自动化工程电力设备辅助工具,具体地说是一种基于多点视觉检测的鸟类驱散系统及方法。
背景技术:
1、变电站作为对电能的电压和电流进行变换、集中和分配的场所,是电网的重要组成部分,能否正常运行,直接关系到电网的安全与可靠。部分电力设备因为技术原因或者经济原因无法全封闭。在此情况下,大量鸟类开始在输电铁塔、变电站、高压塔杆等地生活、栖息、筑巢和繁衍,造成了电力行业极大的安全隐患和损失。随着变电站数量的不断增加以及生态环境的改善,鸟害问题已成为严重威胁变电站设备安全运行的重要因素,因鸟害造成的设备障碍及事故逐年上升,由此造成的损失也越来越大。给变电设备的正常稳定运行带来了隐患,影响到电网运行的可靠性与经济性。
2、近年的电网统计资料表明,由于鸟类活动引起的线路故障仅次于雷害和外力破坏,占线路故障总数的第3位,造成系统减供负荷,产生了大量的电力损失和经济损失。
3、为了避免鸟害引起的电力设施损毁和电力安全事故,目前国内各供电公司输变电单位驱鸟采用了多种技术措施驱逐飞鸟,主要有鸟刺、风车式驱鸟器、高压电子脉冲电击驱鸟、电容放电产生空爆等方法。这些方案在使用初期效果较好,鸟类很容易受到惊吓而飞走。但随着时间推移,鸟类逐步适应环境,驱鸟效果会大大的降低。这些驱鸟设备还有可能带来一些负面的作用,因此并不能够长期的使用。
4、通讯、计算机、自动化等技术在电网中得到广泛深入的应用,并与传统电力技术有机融合,极大地提升了电网的智能化水平。电网的安全稳定性和供电可靠性将大幅提升,电网各级防线之间紧密协调,具备抵御突发性事件和严重故障的能力,能够有效避免大范围连锁故障的发生,显著提高供电可靠性,减少停电损失。对电网电力系统进行智能化改造,使用先进设备代替人可以减轻电力工人的作业负担和工作风险,同时有着较好的经济效益,节省大量的人力财力,并且还能够实现变电站的全覆盖,驱鸟的范围较为广泛,驱鸟的效果也更好。基于可见光相机的鸟类驱散装置在市场应用层面有广阔的应用前景。
技术实现思路
1、针对上面这些问题,本发明的目的在于提供一种基于多点视觉检测的鸟类驱散系统及方法,该系统设备简单、覆盖范围广、灵活拆装、驱鸟效果方法灵活。
2、本发明为实现上述目的所采用的技术方案是:一种基于多点视觉检测的鸟类驱散系统,包括:主控制器以及与其相连的可见光相机组件和超声波驱鸟器;
3、超声波驱鸟器包括:地面固定板、支撑座,电动二维转台、连接板、超声波发生器、驱鸟炮可见光相机、驱鸟炮支撑柱、驱鸟炮相机安装座以及固定延展支架;
4、所述电动二维转台的底座与支撑座连接,支撑座、下设有一支撑杆,所述支撑杆与地面固定板连接,所述地面固定板通过螺钉固定在地面;
5、所述连接板与电动二维转台固连,所述电动二维转台带动连接板旋转或俯仰运动,在连接板的平台上设有驱鸟炮支撑柱,所述驱鸟炮支撑柱顶端固连有超声波发生器,所述超声波发生器与主控制器连接;
6、所述电动二维转台的转台与固定延展支架连接,所述固定延展支架末端设有驱鸟炮相机安装座,所述驱鸟炮相机安装座上设有驱鸟炮可见光相机,所述驱鸟炮可见光相机与主控制器连接;
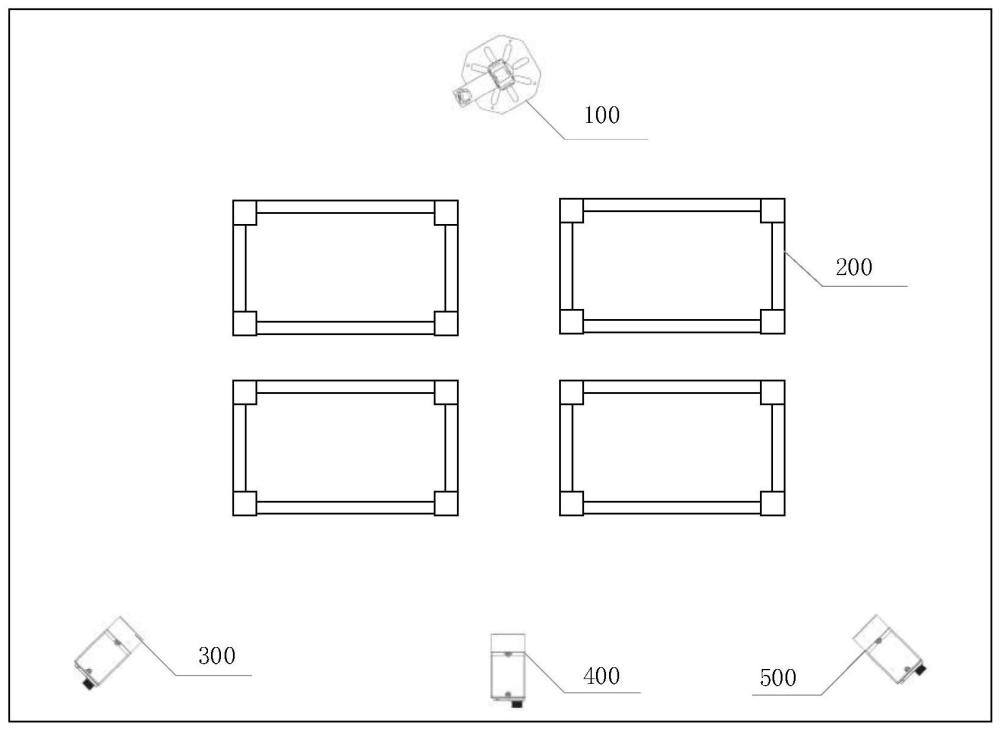
7、所述超声波驱鸟器设于受鸟患设备一侧,所述可见光相机组件设于对应超声波驱鸟器的受鸟患设备另一侧,且可见光相机组件与主控制器连接;
8、所述主控制器,与超声波驱鸟器连接,用于接收可见光相机组件捕捉的图像中鸟类目标位置信息,并发送至声波驱鸟炮组件,使声波驱鸟炮组件执行对准发射动作。
9、所述固定延展支架为l形板,l形板末端设有驱鸟炮可见光相机。
10、所述连接板为c字形板,连接板的两端与电动二维转台的俯仰输出轴固连,以实现连接板带动超声波发生器的俯仰运动。
11、所述驱鸟炮可见光相机与超声波发生器的炮筒方向共线,且均与主控制器连接。
12、所述可见光相机有三个,分别为:可见光相机a、可见光相机b和可见光相机c;所述可见光相机b设于受鸟患设备正前方,与超声波驱鸟器相对设置,可见光相机b覆盖受鸟患设备正前方视场,所述可见光相机a和可见光相机c设于可见光相机b一侧,且可见光相机a和可见光相机c的视场范围分别覆盖受鸟患设备的左右两侧。
13、所述可见光相机a和可见光相机c对称设于可见光相机b左右两侧;三个可见光相机共线,且共线平行于受鸟患设备,所述可见光相机a、可见光相机b和可见光相机c均与主控制器连接。
14、一种基于多点视觉检测的鸟类驱散方法,包括以下步骤:
15、1)对可见光相机组件与超声波驱鸟器之间进行标定;
16、2)可见光相机组件a、可见光相机组件b、可见光相机组件c位于受监测装置一侧,当鸟类动态目标进入可见光相机的固定场景视野范围内时,并根据像素点判别鸟类目标的种类,得到鸟类的臂展长度范围,根据鸟类的臂展范围估测鸟类目标的位置;
17、3)将鸟类的臂展范围估测鸟类目标的位置并发送至主控制器,主控制器进行判断是否为同一鸟类目标,选择驱散方式;
18、4)主控制器根据估测的鸟类目标的位置控制电动二维云台转动,调动超声波驱鸟器上的驱鸟炮可见光相机,使其朝向目标位置,再次定位,得到鸟类目标相对于超声波驱鸟器的位置;
19、5)对准动作完成时,主控制器控制超声波发生器发出频率变化的超声波,实现驱散鸟类目标。
20、6)步骤2)中所述根据像素点判别鸟类目标的种类,得到鸟类的臂展长度范围,根据鸟类的臂展范围估测鸟类目标的位置,具体为:
21、鸟类目标的臂展长度h,即:
22、
23、其中,d为鸟类目标距离可见光相机组件的z轴距离,f为相机的焦距,h为鸟类目标的臂展长度,h为相机成像大小。根据d可以粗估鸟类目标基于可见光相机的位置
24、建立摄像机坐标系o3-x3y3z3与超声波驱鸟器坐标系o1-x1y1z1间的位姿转换矩阵。通过坐标齐次变换,就可以得到鸟类目标相对于超声波驱鸟器的位置:
25、
26、其中,为鸟类目标基驱鸟器的粗估位置,为鸟类目标基于任意可见光相机的粗估位置,为可见光相机坐标系相对于驱鸟器坐标系的齐次变换矩阵,为可见光相机坐标系相对于驱鸟器坐标系的旋转矩阵,为可见光相机坐标系原点在驱鸟器坐标系中的平移向量,均由标定得到。
27、所述步骤4)中,具体为:
28、任意捕捉到鸟类目标的可见光相机组件、固定于超声波驱鸟器(101)上的炮筒可见光相机(105)的观测坐标系分别为o3-x3y3z3、oc-xcyczc,对应则有:
29、
30、其中,(xb,yb,zb)为点p在可见光相机组件的坐标,b为基线距,f为两个相机的焦距,(u1,v1)(u2,v2)分别为鸟类目标点在两个相机所成图像中的坐标;
31、
32、由此可以计算出鸟类目标在可见光相机组件的摄像机坐标系o3-x3y3z3下的表达:
33、
34、通过坐标齐次变换,就可以得到鸟类目标相对于超声波驱鸟器的位姿:
35、
36、其中,为鸟类目标基超声波驱鸟器的位置,为鸟类目标基于可见光相机的位置。
37、所述步骤3)中所述主控制器进行判断是否为同一鸟类目标,选择驱散方式,具体为:
38、若运行时有多台固定可见光相机组件同时捕获到同一鸟类目标,由主控制器判定距离鸟类目标最近的可见光相机组件数据为有效数据;
39、若运行时同时出现了多个鸟类目标,由主控制器判定鸟类目标距离可见光相机组件的远近,将鸟类目标由远及近逐次驱离。
40、本发明具有以下有益效果及优点:
41、1.本发明相对于传统的策略,可见光识别两次定位的方法鲁棒性更强,其位置精度和速度跟踪精度都较高,使得超声波驱鸟器的运动跟随理想轨迹,为变电站实现精准驱鸟提供了有效依据。
42、2.本发明根据现有驱鸟手段并基于变电站的应用情况提出了变电站定向超声波驱鸟器定向完成鸟类驱散,实现了驱鸟设备的远程控制,实现了驱鸟设备的集中化管理。该系统具有驱鸟效果持续时间长、避免鸟类适应性、维护简单等优点。
43、3.本发明结构简单,所需硬件设备少,并且设备可以根据需求灵活拆装。因为只使用可见光相机,设备便宜成本较低。驱鸟装置的有效作业范围大,可以覆盖整个变电站,能够全天候自动扫描变电站及其周边区域。
44、4.本发明采用超声波方式进行驱鸟,这种驱鸟方式并不对鸟类产生直接伤害,在驱鸟的同时也保护了鸟类。
本文地址:https://www.jishuxx.com/zhuanli/20240614/104135.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。