基于单片机和机械臂的红薯秧苗自动取苗分苗装置
- 国知局
- 2024-07-12 13:17:04
本发明属于农业机械,具体涉及一种基于单片机和机械臂的红薯秧苗自动取苗分苗装置,能够实现自动化将红薯秧苗从秧苗箱中取出,并实现红薯秧苗呈有序、等距排列。
背景技术:
1、红薯又称白薯、甘薯、地瓜、红苕,耐瘠薄、耐干旱、适应性强,产量高,我国红薯的栽培面积和产量仅次于水稻、小麦、玉米位居第四,在我国农业种植结构和粮食作物生产中占有重要地位。
2、红薯种植过程复杂,劳动强度较高,主要生产环节包括育苗、剪苗、起垄、移栽、田间管理等。其中,红薯秧苗的培育,一般采用苗床育苗,且为减少红薯受病毒的影响,在剪苗过程中采用高剪苗方式,来降低红薯秧苗带病概率,使得红薯秧苗的移栽成为典型的裸苗移栽。红薯秧苗具有叶片大、叶柄长,茎秆较细且不规则,群体纠缠现象严重等特点,得红薯秧苗分苗取苗作业一直依赖人工完成,效率低,成本高。
3、即使目前已有的甘薯裸苗移栽机械,仍均需要人工跟随机具一同前进实时进行分苗喂苗工作,具体表现为人工将红薯秧苗放在夹取苗的传送带上,然后将红薯秧苗传输至机构夹取点,最后栽植入地。这种喂苗方式效率低,且劳动强度大,长时间工作情况下容易造成漏苗现象。
4、为解决该问题,国内许多学者对此展开了研究,例如申请号为202011592976.4的发明专利公开了一种裸苗固定苗带、自动送苗装置及其方法,能够实现依靠苗带的凹槽对红薯秧苗进行定位与固定,使得红薯秧苗呈有序、等距排列,便于运输和自动化有序送苗。该装置将分苗作业和移栽作业分开进行,提高移栽效率,但在将红薯秧苗安装至苗带上时,仍需依靠人工进行分苗、安装作业,实际整体移栽过程所需劳动力情况并未得到改善。
5、为实现将红薯秧苗高效自动化取苗送苗作业,本发明提供了一种基于单片机和机械臂的红薯秧苗自动取苗送苗装置,能够实现自动化将红薯秧苗从秧苗箱中取出,并实现红薯秧苗呈有序、等距排列
技术实现思路
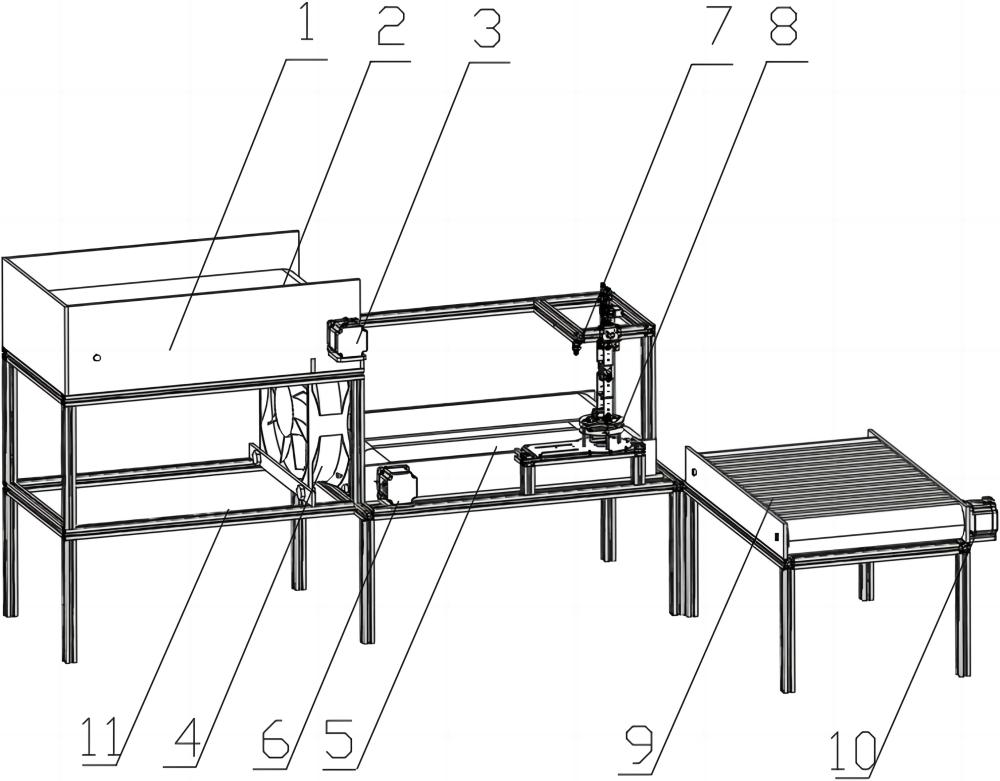
1、本发明提供了一种基于单片机和机械臂的红薯秧苗自动取苗分苗装置,该装置由秧苗箱、一级传送带、一级步进电机、调速直流电机风扇、二级传送带、二级步进电机、光电传感器、机械臂、三级传送带、三级步进电机、机架构成。
2、所述秧苗箱固定安装在所述机架的后上部,所述一级传送带安装在所述秧苗箱的底部充当底板,所述一级步进电机安装在所述秧苗箱的左侧并为所述一级传动带提供动力,所述调速直流电机风扇安装在所述秧苗箱下部,所述二级传送带安装在所述机架前部,所述二级步进电机安装在所述二级传送带的左侧并为所述二级传送带提供动力,所述光电传感器安装在所述二级传送带的上方,所述机械臂安装在所述光电传感器的左侧,所述三级传送带安装在所述机械臂的前方,所述三级步进电机安装在所述三级传送带的前侧并为所述三级传送带提供动力。
3、所述调速直流电机风扇的转速在工作过程中可实现由大变小的调节,以达到风力由大到小的变化。直流电机的转速可通过单片机输出的pwm波的占空比进行调节,相关技术成熟。
4、所述机械臂采用六自由度的开源机械臂模型,通过上位机软件能够实现在空间范围内的抓起或放置等动作组,通过单片机技术可实现动作组的程序化实现,广泛应用于移栽或者抓取植株等,相关技术成熟。
5、所述二级传送带的皮带由两块不接触的平行皮带组成,两块皮带中间留有间隙,以保证所述机械臂在抓取所述二级传送带上方的红薯秧苗时所述机械臂的抓取部位不会触碰到所述二级传送带,在两块皮带中间的间隙中进行抓取动作。
6、所述三级传送带上开设等间距的凹槽,以实现放置在所述三级传送带上的红薯秧苗呈有序、等距排列,该三级传送带也可替换为其他装置,如特定模具或者苗带固定装置,只要保证红薯秧苗最终呈有序、等距排列即可。
7、所述一级步进电机、所述二级步进电机、所述三级步进电机的驱动与停止均可以由单片机程序执行,相关技术成熟。
8、在该装置开始工作前,人工将红薯秧苗堆放在所述秧苗箱中,即所述一级传送带上方。当该装置开始工作时,所述一级步进电机带动所述一级传送带缓慢转动后停转,使得所述一级传送带上的一部分红薯秧苗掉落。
9、进一步,在红薯秧苗掉落过程中,所述调速直流电机风扇的转速由大变小,风力也由大变小,使得每一个掉落的红薯秧苗在掉落过程中获得不同的水平方向的加速度,最终使每一个掉落的红薯秧苗落在所述二级传送带的水平方向不同位置,此时所述调速直流电机风扇停转。
10、进一步,所述二级步进电机带动所述二级传送带转动,使得红薯秧苗随着所述二级传送带向所述光电传感器方向移动,当所述光电传感器扫描到红薯秧苗时,所述二级步进电机停转,所述机械臂执行预定的动作组,拾取扫描到的红薯秧苗,并将该红薯秧苗放置在所述三级传送带的凹槽中。
11、进一步,每放置一根红薯秧苗,所述三级步进电机转动固定角度带动所述三级传送带前进固定位移,使所述三级传送带的下一个凹槽处于预定位置以备红薯秧苗的放置;同时所述二级步进电机带动所述传送带及其上方的剩余红薯秧苗继续前进,当所述光电传感器再次扫描到红薯秧苗时,重复上一步操作,直至所述二级步进电机累计转动角度或者所述二级传送带累计前进位移达到预定数值以保证离所述光电传感器最远端的红薯秧苗被所述机械臂拾取完毕。
12、进一步,当上一步完成后,所述一级步进电机再次开始转动,重复以上流程,直至所述一级步进电机累计转动角度或者所述一级传送带累计前进位移达到预定数值以保证所有红薯秧苗均已经掉落。
13、该基于单片机和机械臂的红薯秧苗自动取苗分苗装置能够实现自动化将红薯秧苗从秧苗箱中取出,并可以结合传送带或者特定模具等方式实现红薯秧苗呈有序、等距排列,实现将红薯秧苗输送至移栽机构自动化无人作业,可提高红薯平栽作业机械效率,实用性强,具有较强的推广应用价值。
技术特征:1.一种基于单片机和机械臂的红薯秧苗自动取苗分苗装置,其特征在于,该装置由秧苗箱、一级传送带、一级步进电机、调速直流电机风扇、二级传送带、二级步进电机、光电传感器、机械臂、三级传送带、三级步进电机、机架构成,所述秧苗箱固定安装在所述机架的后上部,所述一级传送带安装在所述秧苗箱的底部充当底板,所述一级步进电机安装在所述秧苗箱的左侧并为所述一级传动带提供动力,所述调速直流电机风扇安装在所述秧苗箱下部,所述二级传送带安装在所述机架前部,所述二级步进电机安装在所述二级传送带的左侧并为所述二级传送带提供动力,所述光电传感器安装在所述二级传送带的上方,所述机械臂安装在所述光电传感器的左侧,所述三级传送带安装在所述机械臂的前方,所述三级步进电机安装在所述三级传送带的前侧并为所述三级传送带提供动力。
2.如权利要求1所述的基于单片机和机械臂的红薯秧苗自动取苗分苗装置,其特征在于,所述二级传送带的皮带由两块不接触的平行皮带组成,两块皮带中间留有间隙,以保证所述机械臂在抓取所述二级传送带上方的红薯秧苗时所述机械臂的抓取部位不会触碰到所述二级传送带,在两块皮带中间的间隙中进行抓取动作。
技术总结本发明提供了一种基于单片机和机械臂的红薯秧苗自动取苗分苗装置,该装置由秧苗箱、一级传送带、一级步进电机、调速直流电机风扇、二级传送带、二级步进电机、光电传感器、机械臂、三级传送带、三级步进电机、机架构成,秧苗箱固定安装在机架的后上部,一级传送带安装在秧苗箱的底部充当底板,一级步进电机安装在秧苗箱的左侧并为一级传动带提供动力,调速直流电机风扇安装在秧苗箱下部,二级传送带安装在机架前部,二级步进电机安装在二级传送带的左侧并为二级传送带提供动力,光电传感器安装在二级传送带的上方,机械臂安装在光电传感器的左侧,三级传送带安装在机械臂的前方,三级步进电机安装在三级传送带的前侧并为三级传送带提供动力,该基于单片机和机械臂的红薯秧苗自动取苗分苗装置能够实现自动化将红薯秧苗从秧苗箱中取出,实现红薯秧苗呈有序、等距排列,可提高红薯平栽作业机械效率,实用性强,具有较强的推广应用价值。技术研发人员:徐颖华,赵友亮,项琎,樊佳明,王欣欣,魏新亮受保护的技术使用者:西北农林科技大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/104156.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表