一种套筒式番茄采摘末端执行器
- 国知局
- 2024-07-12 13:17:14
本发明涉及农业采摘设备,具体涉及一种套筒式番茄采摘末端执行器。
背景技术:
1、番茄的果实营养丰富,具特殊风味,可以生食、煮食、加工番茄酱、汁或整果罐藏,成为人们的主要蔬菜之一,随着我国大棚番茄种植技术推广,种植面积及年产量越来越大,研究并推广番茄自动化收获技术,成为现阶段急需解决的问题。
2、番茄生长时,通常为3到5个成簇,它们果实之间相互接触、相互影响。因此,在采摘过程中,末端执行器很难以理想的姿态接近并夹持果实,极容易出现夹持失败或对相邻果实造成损伤等问题;同时,为了避免果实在装运过程中相互刺伤,采摘番茄时应轻柔地摘取并轻放、最好不带果蒂,这也为番茄的采摘带来一定的困难,即采摘过程中需要有效分离果实与果蒂,否则需要在采摘后进行二次处理、降低采摘效率。
3、现有技术对于番茄采摘机器人的研究中,主要存在两种方式:一种是通过吸盘首先吸附住番茄、并将其从果束中拉开,然后夹持果实并旋转分离果梗,旋转过程中,末端执行器不可避免的会与周围果实产生接触、造成相邻番茄簇果实的损伤,同时,由于番茄枝干较为细长且柔软,吸盘不容易将目标番茄从番茄簇中拉扯、分离出来,强力拉扯容易拽毁番茄主杆,采摘效果差,此外,采摘过程中、较大的依赖吸盘与番茄的结合力,采摘稳定性较差;另一种是通过设计相应的机构对果实进行夹持,再利用腕关节的两个垂直方向上的转动来模拟人手掰拧果梗的动作,实现番茄的采摘,但是,其一是需要较大的转动空间、确保末端执行器的“掰拧”(但成簇的番茄果实是相互邻接、不具备提供转动空间的条件),二是要求采摘果实的果梗与果实之间结合力小、适用范围窄,若果梗与果实之间结合力大:夹持小无法有效分离果实与果梗,夹持力大容易造成果实表皮的损伤、影响果实的储存时间(番茄表皮一旦受损、其内果肉会很快出现腐烂变质),三是“掰拧”过程中会产生较大的振动、易影响相邻番茄族,若相邻番茄簇的果实与果梗之间结合力小、那果实会直接掉落损坏。因此,现有番茄采摘末端执行器存在采摘效率低、采摘稳定性差、无法有效分离果实与果梗、易对果实表皮造成损伤、易影响相邻簇番茄等问题。
技术实现思路
1、针对以上现有技术存在的问题,本发明的目的在于提供一种套筒式番茄采摘末端执行器,该末端执行器通过推拉式采摘结构,有效规避传统的拉拽式采摘结构或吸盘式采摘结构在番茄采摘过程中出现的采摘效率低、采摘稳定性差、无法有效分离果实与果梗、易对果实表皮造成损伤、易影响相邻簇番茄等问题。
2、本发明的目的通过以下技术方案实现:
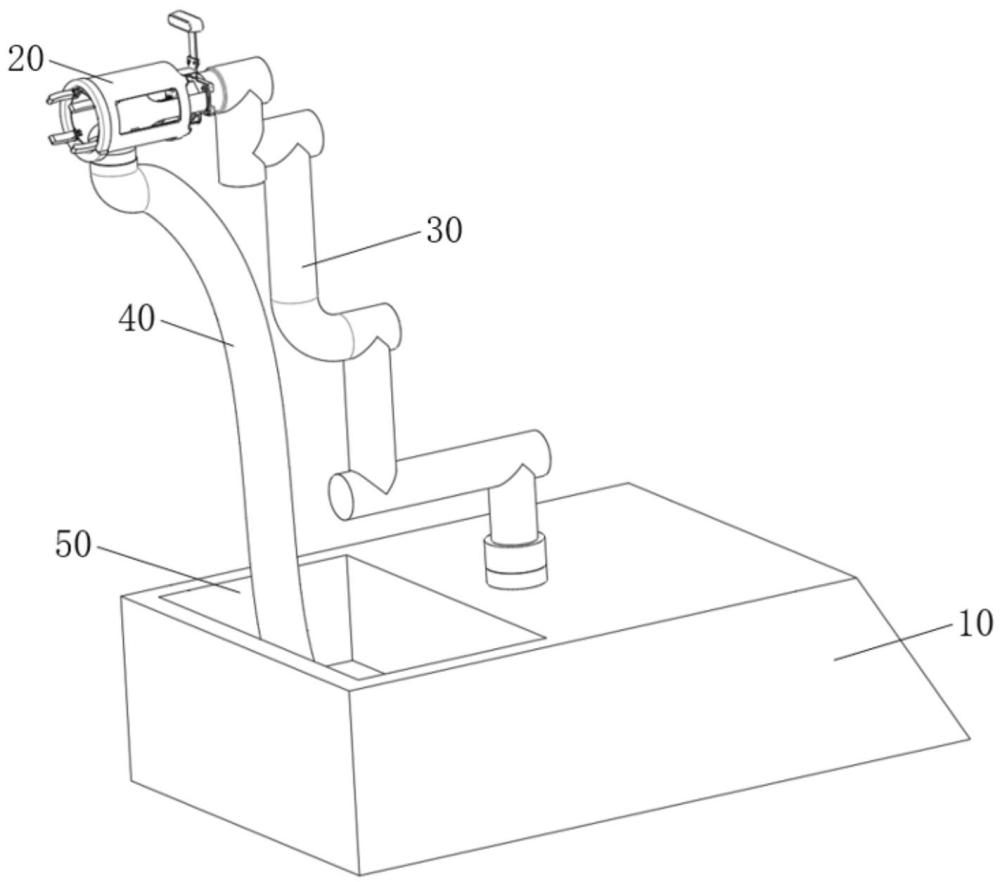
3、一种套筒式番茄采摘末端执行器,(末端执行器)设置在采摘机器人上,采摘机器人包括移动平台、采摘机械臂、执行器本体、输送管、收纳槽与中控系统,所述采摘机械臂固定设置在移动平台的端面且采摘机械臂远离移动平台的一端端部设置执行器本体;移动平台端面一侧开设收纳槽,输送管一端与执行器本体连通、另一端与收纳槽连通;移动平台位于采摘机械臂远离收纳槽的一侧内部设置中控系统,中控系统与采摘机械臂、执行器本体电性连接。
4、基于上述方案的进一步优化,所述采摘机械臂采用多轴联动机械臂。
5、基于上述方案的进一步优化,所述执行器本体包括固定支架、信息采集机构、内筒组件、夹持组件、外筒组件与驱动机构,固定支架固定设置在采摘机械臂的末端(即采摘机械臂远离移动平台的一端)且固定支架上端设置信息采集机构;固定支架远离移动平台的一端端面固定设置内筒组件,内筒组件包括内筒骨架、转动支座、凸块与定位支架,内筒骨架一端与固定支架远离移动平台的一侧侧面固定连接且内筒骨架靠近固定支架一侧的外壁绕其中轴线均匀开设多个u形槽,内筒骨架远离固定支架的一端外壁且绕其中轴线均匀设置多个转动支座,内筒骨架位于u形槽与转动支座之间的外壁且绕其中轴线均匀设置多个凸块,内筒骨架位于u形槽与转动支座之间的内壁固定设置定位支架;夹持组件对应转动支座设置,包括拨动件、第一销轴、滚轮、第二销轴、弹性件与柔性套,拨动件整体为内凹式结构,其靠近转动支座的一端设置相互平行的第一销轴与第二销轴且第二销轴位于内侧(即靠近内筒骨架的一侧),第二销轴转动设置在对应的转动支座上,第一销轴外壁固定套接滚轮,第二销轴上设置弹性件,弹性件一端与拨动件连接、另一端与内筒骨架连接;外筒组件同轴设置在内筒组件的外圈,包括外筒骨架、柔性垫圈、滚轮导轨、滑移导轨与连接支架,外筒骨架同轴设置在内筒骨架的外圈且其(即外筒骨架)远离固定支架的一端同轴设置柔性垫圈,外筒骨架远离固定支架一侧的内壁且对应滚轮设置多根凸出的滚轮导轨,滚轮导轨前端表面相对于外筒骨架中心线具有倾斜角度、其后端表面平行于外筒骨架中心线,外筒骨架位于滚轮导轨与固定支架之间的内壁且对应凸块开设多根滑移导轨,凸块滑动卡接在对应的滑移导轨内,外筒骨架靠近固定支架的一端设置同轴的连接支架;驱动机构设置在固定支架上且位于内筒骨架的内壁。
6、基于上述方案的进一步优化,所述弹性件采用扭转弹簧。
7、基于上述方案的进一步优化,所述滚轮导轨前端表面相对于外筒骨架中心下的倾斜角度为5°~30°。
8、基于上述方案的进一步优化,所述驱动机构包括电机与丝杠,电机固定设置在固定支架远离移动平台的端面且电机输出轴固定设置丝杠,丝杠与内筒骨架同轴设置且丝杠远离电机的一端贯穿连接支架中部后、与定位支架转动连接,丝杠与连接支架螺纹连接且连接支架外支脚对应u形槽设置。
9、基于上述方案的进一步优化,所述连接支架采用十字形支架、x形支架或y形支架中的任一种。
10、基于上述方案的进一步优化,所述内筒骨架位于远离固定支架一侧的底部设置开口,外筒骨架底部对应开设滑移槽,输送管远离收纳槽的一端贯穿滑移槽后、与开口紧密连通。
11、基于上述方案的进一步优化,所述外筒骨架远离固定支架的一端端面上部设置弧形刀片,柔性垫圈对应弧形刀片开设弧形槽,初始时弧形刀片隐藏在弧形槽内(即弧形刀片露出宽度小于柔性垫圈的厚度)。
12、以下是本发明技术方案所具备的技术效果:
13、本申请通过固定支架、信息采集机构、内筒组件、夹持组件、外筒组件与驱动机构组成的执行器本体对番茄果实进行采摘,利用内筒组件、夹持组件与外筒组件的配合,通过单一驱动(即驱动外筒组件运动)实现推拉式的采摘方式,完成对番茄采摘过程的同时推动与拉扯,进而有效实现番茄果梗的切断,且能够在最接近果实处进行果梗切断,避免果实处的果梗太长而影响后续运输、储存等。同时,本申请通过推拉式的采摘方式,一是实现两个动作的同步进行、减少驱动机构的使用数量,提升整个装置的运行稳定性;二是无需额外的转动空间、偏移空间等进行果实的切断,从而最大程度的减小了采摘过程中对相邻番茄簇的影响;三是精准作用在与采摘番茄的连接果梗处、对番茄主干的作用力十分小,不会对主干造成损伤;四是通过推、拉相反且同时作用力,实现番茄果梗的快速、有效切断,提升采摘效率,避免反复进行采摘、果梗多次剪切等问题的发生。
技术特征:1.一种套筒式番茄采摘末端执行器,其特征在于:所述末端执行器设置在采摘机器人上,采摘机器人包括移动平台、采摘机械臂、执行器本体、输送管、收纳槽与中控系统,采摘机械臂固定设置在移动平台的端面且采摘机械臂远离移动平台的一端端部设置执行器本体;移动平台端面一侧开设收纳槽,输送管一端与执行器本体连通、另一端与收纳槽连通;移动平台位于采摘机械臂远离收纳槽的一侧内部设置中控系统,中控系统与采摘机械臂、执行器本体电性连接。
2.根据权利要求1所述的一种套筒式番茄采摘末端执行器,其特征在于:所述采摘机械臂采用多轴联动机械臂。
3.根据权利要求1或2所述的一种套筒式番茄采摘末端执行器,其特征在于:所述执行器本体包括固定支架、信息采集机构、内筒组件、夹持组件、外筒组件与驱动机构,固定支架固定设置在采摘机械臂的末端且固定支架上端设置信息采集机构;固定支架远离移动平台的一端端面固定设置内筒组件,内筒组件包括内筒骨架、转动支座、凸块与定位支架,内筒骨架一端与固定支架远离移动平台的一侧侧面固定连接且内筒骨架靠近固定支架一侧的外壁绕其中轴线均匀开设多个u形槽,内筒骨架远离固定支架的一端外壁且绕其中轴线均匀设置多个转动支座,内筒骨架位于u形槽与转动支座之间的外壁且绕其中轴线均匀设置多个凸块,内筒骨架位于u形槽与转动支座之间的内壁固定设置定位支架;夹持组件对应转动支座设置,包括拨动件、第一销轴、滚轮、第二销轴、弹性件与柔性套,拨动件整体为内凹式结构,其靠近转动支座的一端设置相互平行的第一销轴与第二销轴且第二销轴位于内侧,第二销轴转动设置在对应的转动支座上,第一销轴外壁固定套接滚轮,第二销轴上设置弹性件,弹性件一端与拨动件连接、另一端与内筒骨架连接;外筒组件同轴设置在内筒组件的外圈,包括外筒骨架、柔性垫圈、滚轮导轨、滑移导轨与连接支架,外筒骨架同轴设置在内筒骨架的外圈且其远离固定支架的一端同轴设置柔性垫圈,外筒骨架远离固定支架一侧的内壁且对应滚轮设置多根凸出的滚轮导轨,滚轮导轨前端表面相对于外筒骨架中心线具有倾斜角度、其后端表面平行于外筒骨架中心线,外筒骨架位于滚轮导轨与固定支架之间的内壁且对应凸块开设多根滑移导轨,凸块滑动卡接在对应的滑移导轨内,外筒骨架靠近固定支架的一端设置同轴的连接支架;驱动机构设置在固定支架上且位于内筒骨架的内壁。
4.根据权利要求1~3任一项所述的一种套筒式番茄采摘末端执行器,其特征在于:所述弹性件采用扭转弹簧。
5.根据权利要求3所述的一种套筒式番茄采摘末端执行器,其特征在于:所述滚轮导轨前端表面相对于外筒骨架中心下的倾斜角度为5°~30°。
6.根据权利要求3所述的一种套筒式番茄采摘末端执行器,其特征在于:所述驱动机构包括电机与丝杠,电机固定设置在固定支架远离移动平台的端面且电机输出轴固定设置丝杠,丝杠与内筒骨架同轴设置且丝杠远离电机的一端贯穿连接支架中部后、与定位支架转动连接,丝杠与连接支架螺纹连接且连接支架外支脚对应u形槽设置。
7.根据权利要求3所述的一种套筒式番茄采摘末端执行器,其特征在于:所述连接支架采用十字形支架、x形支架或y形支架中的任一种。
8.根据权利要求3所述的一种套筒式番茄采摘末端执行器,其特征在于:所述内筒骨架位于远离固定支架一侧的底部设置开口,外筒骨架底部对应开设滑移槽,输送管远离收纳槽的一端贯穿滑移槽后、与开口紧密连通。
9.根据权利要求3所述的一种套筒式番茄采摘末端执行器,其特征在于:所述外筒骨架远离固定支架的一端端面上部设置弧形刀片,柔性垫圈对应弧形刀片开设弧形槽,初始时弧形刀片隐藏在弧形槽内。
技术总结本发明提供一种套筒式番茄采摘末端执行器,涉及农业采摘设备领域,末端执行器设置在采摘机器人上,采摘机器人包括移动平台(10)、采摘机械臂(30)、执行器本体(20)、输送管(40)、收纳槽(50)与中控系统,执行器本体(20)包括固定支架(21),信息采集机构(22),由内筒骨架(231)、转动支座(232)、凸块(233)与定位支架(234)组成的内筒组件,由拨动件(241)、第一销轴(242)、滚轮(243)、第二销轴(244)、弹性件(245)与柔性套(246)组成的夹持组件(24),由外筒骨架(251)、柔性垫圈(252)、滚轮导轨(253)、滑移导轨(254)与连接支架(255)组成的外筒组件以及驱动机构。该末端执行器采摘效率高、采摘稳定性好。技术研发人员:李晓娟,王俊东,王国强,邹湘军,熊明明,陈涛,刘建璇受保护的技术使用者:新疆大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/104183.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表