旋转关节力矩控制方法及装置、电子设备、存储介质与流程
- 国知局
- 2024-07-12 10:23:29
本技术涉及医疗器械,特别涉及一种旋转关节力矩控制及装置、电子设备、计算机可读存储介质。
背景技术:
1、显微外科是一门借助光学放大设备和专用显微外科手术器械进行手术的学科,它是现代外科手术技术的重要分支,在创伤和修复重建领域发挥着重要的作用。由于显微外科在多个科室均有应用,如淋巴外科、整形外科、手足外科、神经外科等。因此,手术的目标位置可能位于人体的各个部位,手术场景和手术室布局也较为多样。在显微外科手术机器人的开发过程中,需要考虑适应各个科室的多种手术场景。可以通过增程臂将显微外科手术机器人的末端执行器移动至不同的位置。增程臂结构还需承受较大的负载,以满足末端执行器的设计要求。因此,增程臂的设计需要充分考虑负载能力、运动范围、精度和稳定性等多个因素,以确保显微外科手术机器人在各种手术场景中都能够发挥良好的性能。在手术准备阶段,通过改变增程臂的构型,将末端执行器定位至所需操作目标位置,通过增程臂的移动来改变末端执行器的位置。
2、增程臂主要由多个旋转关节、多个连杆、末端执行器固定座以及使能按钮等结构组成。连杆和连杆之间通过旋转关节可实现相对转动,由于每个旋转关节配备了谐波减速器,谐波减速器存在静摩擦力,使得需要施加较大的力才能克服其摩擦力并开始拖动。同时,在拖动的过程中,也需要克服谐波减速器的动摩擦力。
3、增程臂上通过设置使能按钮,使增程臂能够在力矩控制功能和位置控制功能之间切换,在力矩控制模式下速度尚未为零的情况下松开使能按钮切换到位置控制模式时,可能导致速度瞬间归零,从而使增程臂的瞬时加速度和速度都过大,表现为增程臂的剧烈抖动。因此,需要设计一种控制算法,能够实现对摩擦力的补偿,并克服增程臂在切换功能模式时发生的剧烈抖动。
技术实现思路
1、本技术实施例的目的在于提供一种旋转关节力矩控制方法,本技术的力矩控制方法,可以实现对旋转关节的摩擦力补偿,改善了以往力矩控制模式下旋转关节启动时的静摩擦力和拖拽时动摩擦力大的问题。
2、第一方面,本技术提供了一种旋转关节力矩控制方法,所述方法应用于手术机器人,所述旋转关节设于所述手术机器人的增程臂,所述方法包括:
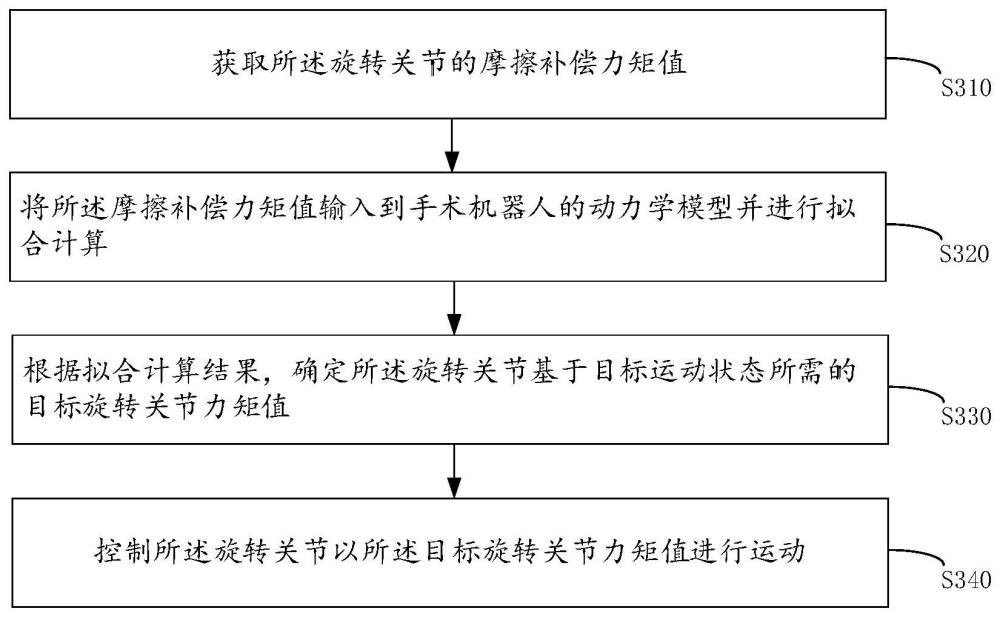
3、获取所述旋转关节的摩擦补偿力矩值;
4、将所述摩擦补偿力矩值输入到手术机器人的动力学模型并进行拟合计算;
5、根据拟合计算结果,确定所述旋转关节基于目标运动状态所需的目标旋转关节力矩值;
6、控制所述旋转关节以所述目标旋转关节力矩值进行运动。
7、于一实施例中,所述获取所述旋转关节的摩擦补偿力矩值,包括:
8、获取所述旋转关节的摩擦力模型;
9、将采集到的所述旋转关节的不同等级的匀速速度值样本输入所述摩擦力模型,进行拟合计算;
10、根据拟合计算结果,获得所述旋转关节在不同等级匀速速度下受到的所述摩擦补偿力矩值。
11、于一实施例中,所述旋转关节具有电流环;所述将采集到的所述旋转关节的不同等级的匀速速度值样本输入所述摩擦力模型,进行拟合计算,包括:
12、通过所述电流环输出不同等级的所述匀速速度值;
13、将不同等级的所述匀速速度值作为输入样本,输入到所述摩擦力模型,进行拟合计算。
14、于一实施例中,所述旋转关节安装有扭矩传感器;所述确定所述旋转关节基于目标运动轨迹所需的目标旋转关节力矩值,包括:
15、获取所述旋转关节输入端施加的转矩;
16、根据所述转矩与扭转的映射关系,确定所述扭矩传感器负载端输出的扭矩值;
17、根据所述扭矩传感器负载端输出的扭矩值以及所述摩擦补偿力矩值,确定所述旋转关节基于目标运动轨迹所需的目标旋转关节力矩值。
18、于一实施例中,所述根据所述转矩与扭转的映射关系,确定所述扭矩传感器负载端输出的扭矩值,包括:
19、根据所述转矩与扭转的映射关系,确定所述扭矩传感器负载端输出的原始扭矩值;
20、对所述扭矩传感器负载端输出的原始扭矩值进行滤波处理,得到处理后的所述扭矩传感器负载端输出的扭矩值。
21、于一实施例中,所述根据所述扭矩传感器负载端输出的扭矩值以及所述摩擦补偿力矩值,确定所述旋转关节基于目标运动轨迹所需的目标旋转关节力矩值,包括:
22、根据所述扭矩传感器负载端输出的扭矩值以及所述摩擦补偿力矩值,确定所述旋转关节的原始旋转关节力矩值;
23、获取预设的阻尼洗漱;
24、根据所述旋转关节的原始旋转关节力矩值以及所述阻尼系数,确定所述旋转关节基于目标运动状态所需的目标旋转关节力矩值。
25、于一实施例中,所述旋转关节具有力矩控制模式,所述力矩控制模式通过使能按钮进行切换;所述控制所述旋转关节以所述目标旋转关节力矩值进行运动,包括:
26、当所述使能按钮处于触发状态时,控制所述旋转关节切换至所述力矩控制模式;
27、控制所述旋转关节以所述力矩控制模式对应的所述目标旋转关节力矩值进行运动。
28、于一实施例中,所述旋转关节具有位置控制模式,所述位置控制模式通过所述使能按钮进行切换;所述方法还包括:
29、当所述使能按钮处于未触发状态时,判断所述旋转关节是否切换至所述位置控制模式;
30、若是,控制所述旋转关节以所述位置控制模式进行工作;
31、若否,控制所述旋转关节以所述力矩控制模式对应的所述目标旋转关节力矩值进行运动。
32、于一实施例中,所述若否,控制所述旋转关节以所述力矩控制模式对应的所述目标旋转关节力矩值进行运动,还包括:
33、判断当前所述旋转关节的速度是否为零;
34、若是,控制所述旋转关节切换至所述位置控制模式进行工作;
35、若否,控制所述使能按钮保持为所述力矩控制模式,并控制所述旋转关节以所述力矩控制模式对应的所述目标旋转关节力矩值进行运动。
36、第二方面,本技术提供一种旋转关节力矩控制装置,包括:
37、获取模块,用于获取所述旋转关节的摩擦补偿力矩值;
38、输入模块,用于将所述摩擦力矩值输入到手术机器人的动力学模型并进行拟合计算;
39、确定模块,用于根据拟合计算结果,确定所述旋转关节基于目标运动状态所需的目标旋转关节力矩值;
40、处理模块,用于控制所述旋转关节以所述目标旋转关节力矩值进行运动。
41、第三方面,本技术还提供了一种电子设备,所述电子设备包括:
42、处理器;
43、用于存储处理器可执行指令的存储器;
44、其中,所述处理器被配置为执行本技术实施例第一方面任意一项所述的旋转关节力矩控制方法。
45、第四方面,本技术还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器运行时,用以执行本技术实施例第一方面任意一项所述的旋转关节力矩控制方法。
46、采用本技术力矩控制方法,可以实现对旋转关节的摩擦力补偿,改善了以往力矩控制模式下旋转关节启动时的静摩擦力和拖拽时动摩擦力大的问题,同时还能够调整拖拽增程臂时的阻尼效果。
47、此外,本技术的方法还可以对增程臂在功能模式切换时发生剧烈抖动和振荡进行优化,从而使用户在拖拽增程臂的过程中的手感更顺滑。
本文地址:https://www.jishuxx.com/zhuanli/20240614/86637.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表