带有被配置为基于所检测到的触发器的位置来施用有助于从刀释放粘连组织的能量的控制电路的外科装置的制作方法
- 国知局
- 2024-07-12 10:25:40
本公开整体涉及端部执行器,该端部执行器适于并且被构造成能够采用多种能量模态操作,使得能够采用同时地、独立地或顺序地施加的能量模态来进行组织密封和切割。更特别地,本公开涉及端部执行器,该端部执行器适于并且被构造成能够与采用组合的超声系统和电外科系统诸如单极或双极射频(rf)的外科器械一起操作,使得能够采用同时地、独立地或顺序地施加的超声能量模态和电外科能量模态来进行组织密封和切割。可基于组织参数或其他算法来施加能量模态。端部执行器可适于并且被构造成能够联接到手持式外科系统或机器人外科系统。
背景技术:
1、采用超声能量模态的超声外科器械凭借此类器械的独特性能特性而在外科手术中得到日益广泛的应用。根据具体器械构型和操作参数,超声外科器械能够基本上同时提供组织的切割和通过凝固的止血,从而有利地使患者创伤最小化。切割动作通常通过器械的远侧端部处的端部执行器、超声刀或超声刀头来实现,该端部执行器、超声刀或超声刀头将超声能量传输到与该端部执行器接触的组织。超声端部执行器可包括超声刀、夹持臂和垫以及其他部件。
2、一些外科器械将超声能量同时用于精确切割和受控凝固。超声能量通过振动与组织接触的刀进行切割和凝固。通过高频振动(例如,每秒55,500次),超声刀使组织中的蛋白质变性以形成粘性凝结物。刀表面施加到组织上的压力使血管塌缩并且允许凝结物形成止血密封。切割和凝固的精度受外科医生的技术以及对功率水平、刀刃、组织牵引力和刀压力的调节的控制。
3、用于将电能模态施加到组织以治疗、密封、切割和/或破坏组织的电外科器械也在外科手术中得到日益广泛的应用。电外科器械通常包括具有安装在远侧的端部执行器的器械,该端部执行器包括一个或多个电极。该端部执行器可抵靠组织定位,使得电流被引入组织中。电外科器械能够被构造用于双极或单极操作。在双极操作期间,电流通过第一电极(例如,有源电极)被引入组织中并且通过第二电极(例如,返回电极)从组织返回。在单极操作期间,电流通过端部执行器的有源电极被引入组织中并且通过例如单独联接到患者身体的返回电极诸如接地垫返回。流经组织的电流所产生的热可在组织内和/或在组织之间形成止血密封,并且因此可特别地适用于例如密封血管。电外科器械的端部执行器还可包括能够相对于组织和电极移动以横切组织的切割构件。电外科端部执行器可适于并且被构造成能够联接到手持式器械以及机器人器械。
4、由电外科器械施加的电能可通过与手持件连通的发生器传递到器械。电能可为射频(“rf”)能量的形式。rf能量为可在200千赫兹(khz)至1兆赫兹(mhz)频率范围内的电能形式。在应用中,电外科器械可通过组织传递低频rf能量,这会引起离子振荡或摩擦,实际上造成电阻加热,从而升高组织的温度。由于受影响的组织与周围组织之间形成明显的边界,外科医生在不损伤相邻的非目标组织的情况下能够以高精确度和控制进行操作。rf能量的低操作温度适用于在密封血管的同时移除、收缩软组织、或对软组织塑型。rf能量特别奏效地适用于结缔组织,该结缔组织主要由胶原蛋白构成并且在接触热时收缩。
5、rf能量可在en 60601-2-2:2009+a11:2011、定义201.3.218-高频中所述的频率范围内。例如,单极rf应用中的频率通常可被限制为小于5mhz。然而,在双极rf能量应用中,频率几乎可为任何值。单极应用通常可使用高于200khz的频率,以便避免由于使用低频电流而导致不希望的对神经和肌肉的刺激。如果风险分析显示神经肌肉刺激的可能性已减轻至可接受的水平,则双极应用可使用较低频率。通常,不使用高于5mhz的频率以最小化与高频渗漏电流相关联的问题。然而,在双极应用的情况下,可使用较高的频率。通常认为,10ma是组织热效应的下限阈值。
6、本文所述性质的超声外科器械和电外科器械可被构造用于开放式外科手术、微创外科手术或非侵入式外科手术。微创外科手术涉及使用通过小切口插入的相机和器械,以便可视化和治疗关节或体腔内的状况。微创手术可完全在体内进行,或者在一些情况下,可与较小的开放式方法一起使用。这些组合方法例如被称为“关节镜、腹腔镜或胸腔镜辅助的外科手术”。本文所述的外科器械还可用于非侵入式手术,诸如例如内窥镜外科手术。这些器械可由外科医生使用手持器械或机器人来控制。
7、利用这些外科器械的挑战是不能根据正在治疗的组织的类型来控制和定制单个能量模态或多个能量模态。希望提供克服当前外科器械的一些缺陷并且改善组织治疗、密封或切割或这些操作的组合的质量的端部执行器。本文所述的组合能量模态端部执行器克服了这些缺陷并且改善了组织治疗、密封或切割或这些操作的组合的质量。
技术实现思路
1、在一个方面,提供了一种用于解剖和凝固组织的设备。该设备包括具有端部执行器的外科器械,该端部执行器适于并且被构造成能够将多种能量模态递送到位于其远侧端部的组织。可同时地、独立地或顺序地施加能量模态。发生器电联接到外科器械并且被构造成能够将多个能量模态提供给端部执行器。在一个方面,发生器被构造成能够将电外科能量(例如,单极或双极射频(rf)能量)和超声能量提供给端部执行器,以允许端部执行器与组织相互作用。能量模态可由单个发生器或多个发生器提供给端部执行器。
2、在各个方面,本公开提供了一种外科器械,该外科器械被构造成能够将至少两种能量类型(例如,超声、单极rf、双极rf、微波或不可逆电穿孔[ire])递送到组织。该外科器械包括用于激活能量的第一激活按钮、用于为激活按钮选择能量模式的第二按钮。第二按钮连接到使用至少一个输入参数来定义能量模式的电路。可通过到发生器的连接或通过软件更新来远程修改输入参数。
3、在一个方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,至少一个电极用作相对于相对的超声刀的可偏转支撑件。至少一个电极穿过超声刀并被构造成能够相对于夹持臂是可偏转的,该夹持臂具有改变至少一个电极下方的组织压缩的机械特性的特征部。至少一个电极包括防止电极和超声刀之间意外接触的特征部。
4、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,可移动夹钳包括至少一个非偏置的可偏转电极,以最小化超声刀与rf电极之间的接触。超声刀垫包括用于将电极固定到垫的特征部。随着垫的高度磨损或被切穿,电极相对于夹钳的高度以渐进方式调节。一旦夹钳从超声刀移开,电极即保持在其新位置。
5、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,至少一个双极rf电极是可偏转的并且具有比近侧偏置更多的远侧偏置。双极rf电极能够相对于夹钳偏转。端部执行器被构造成能够改变近侧端部至远侧端部的组织压缩的机械特性,以产生比单独夹持所产生的压力模式更均匀或不同的压力模式。
6、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,双极rf电极是可偏转的,并且端部执行器沿该可偏转电极的长度提供可变的压缩/偏置。端部执行器被构造成能够基于夹钳闭合或夹持量来改变电极下方的组织压缩的机械特性。
7、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,垫包括不对称的节段以提供对超声刀支撑件的支撑,并且电极是可移动的。该不对称的分段垫被构造用于与可移动双极rf电极协作接合。该分段超声支撑垫至少部分地延伸穿过双极rf电极。至少一个垫元件显著高于第二垫元件。第一垫元件整个地延伸穿过双极rf电极,并且第二垫元件部分地延伸穿过双极rf电极。第一垫元件和第二垫元件由不同材料制成。
8、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,电极的物理参数的变化与可偏转电极结合使用,以改变递送到组织的能量密度和组织相互作用。电极的物理方面沿其长度变化,以便随着电极也偏转而改变电极与组织的接触面积和/或能量密度。
9、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,提供了一种超声换能器控制算法,以在检测到超声刀与电极之间的接触短路时减小由超声或rf发生器递送的功率,从而防止损坏超声刀。该超声刀控制算法监测电短路或超声刀与电极的接触。该检测用于在超过电阈值最小值时调节超声换能器的功率/振幅水平,并且将换能器功率/振幅阈值调节到低于可能导致损坏超声刀、超声发生器、双极rf电极或双极rf发生器的最小阈值的水平。所监测的电参数可以是组织阻抗(z)或电连续性。功率调节可以是为了切断外科装置的超声发生器、双极rf发生器,或者它可以是对电参数、压力或时间或这些参数的任何组合的成比例响应。
10、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,在夹持臂中提供夹钳的特征部或方面以最小化组织粘连并且改进组织控制。夹持臂组织路径或夹持区域包括被构造成能够相对于夹持臂/超声刀调节组织路径以形成预定接触位置从而减少组织粘连和炭化的特征部。
11、在另一方面,本公开提供了一种组合式超声/双极rf能量外科装置。该组合式超声/双极rf能量外科装置包括端部执行器。端部执行器包括夹持臂和超声刀。夹持臂包括可移动夹钳、柔性聚合物垫和至少一个双极rf电极。至少一个电极联接到rf发生器的正极,并且超声刀联接到rf发生器的负极。超声刀声学上联接到由超声发生器驱动的超声换能器叠堆。在一个方面,提供了部分导电夹持臂垫,以使电极能够磨穿并且最小化超声刀与双极rf电极之间的电短路。该夹持臂垫包括导电部分和不导电部分,从而使得其充当双极rf电极中的一者,同时还充当超声刀的耐磨支撑结构。该夹持臂垫的导电部分围绕垫的周边定位并且不定位在超声刀接触区域的正下方。导电部分被配置为能够劣化或磨损,以防止与超声刀的任何接触中断剩余导电垫的导电性。
12、在另一方面,本公开提供了一种被构造成能够抓持组织的端部执行器。该端部执行器包括被配置为能够联接到超声换能器的超声刀和包括夹持臂垫的夹持臂。超声刀被配置为能够将超声能量传递到组织。夹持臂垫包括导电材料和不导电材料。夹持臂垫被配置为能够射频能量电路的一个电极。该电极被配置为能够将射频能量通过组织传递到射频能量电路的返回电极。不导电材料被配置为能够随着夹持臂垫在端部执行器的整个使用寿命期间劣化而减小导电材料与超声刀之间发生电短路的可能性。
13、在另一方面,本公开提供了一种被构造成能够结合超声刀来抓持组织的夹持臂。该夹持臂包括具有限定通道的导电层以及不导电层的夹持臂垫。不导电层被定位成与导电层相邻,使得不导电层的至少一部分穿过通道定位。夹持臂垫被配置为射频能量电路的一个电极。不导电材料被配置为能够减小导电材料与超声刀之间发生电短路的可能性。
14、在另一方面,本公开提供了一种被构造成能够抓持组织的端部执行器。该端部执行器包括超声刀和具有夹持臂垫的夹持臂。夹持臂垫包括导电材料和不导电材料。不导电材料被配置为能够防止导电材料随着夹持臂垫在端部执行器的整个使用寿命期间劣化而被定位成远离超声刀预定距离。
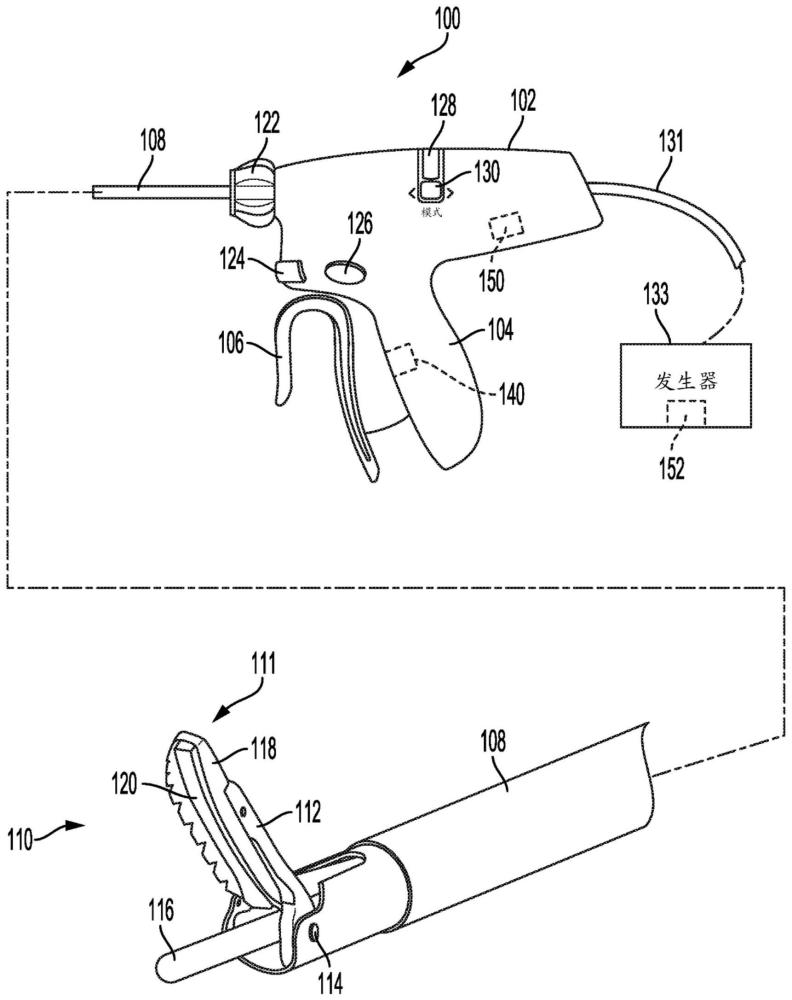
15、在另一方面,本公开提供了一种外科装置。该外科装置可包括端部执行器,该端部执行器包括夹钳;触发器,该触发器被配置为能够打开和闭合该夹钳;传感器,该传感器被配置为能够检测该触发器的相对位置;和控制电路,该控制电路可通信地联接到该传感器和发生器,其中该控制电路被配置为能够使该发生器施用与要在组织上执行的外科手术相关联的能量,从该传感器接收信号,基于该信号来确定用户正试图从该夹钳释放该组织,以及响应于确定该用户正试图从该夹钳释放该组织而使该发生器施用被配置为能够从该夹钳释放该组织的能量,其中被配置为能够从该夹钳释放该组织的能量不同于该与要在该组织上执行的外科手术相关联的该能量。
16、在另一方面,本公开提供了一种被配置用于与外科装置一起使用的端部执行器。该端部执行器可包括夹持臂基部、具有第一几何结构的夹持臂垫、具有第一硬度的超声刀;和电极。该电极可包括具有第二硬度的电极材料,其中该第二硬度小于该超声刀的该第一硬度,并且其中该电极材料限定具有第二几何结构的腔体;该第二几何结构可对应于该第一几何结构,使得该夹持臂垫的一部分可定位在该腔体内;和中间材料,该中间被配置为能够将该电极材料粘附到该夹持臂基部。
17、在另一方面,本公开提供了一种制造电极的方法,该电极被配置用于在外科装置的端部执行器内使用。该方法可包括将电极材料形成为期望的几何构型;在该电极材料中形成一个或多个凹坑;并且将中间材料施加到形成在该电极中的该一个或多个凹坑中,其中该中间材料适于将该中间材料焊接、结合到该电极材料。该方法还可包括将该中间材料附接到该端部执行器的夹持臂基部,以将该中间材料和该电极材料固定到该夹持臂基部。
18、除上述内容之外,在诸如本公开的文本(例如,权利要求和/或具体实施方式)和/或附图的教导内容中列出和描述了各种其他方法和/或系统和/或程序产品方面。
19、上述内容是概述,因此可包括简化、概括、纳入部分和/或细节的省略;因此,本领域技术人员应当理解,该概述仅仅是说明性的,并不旨在以任何方式进行限制。本文描述的装置和/或工艺和/或其他主题的其他方面、特征和优点将在本文列出的教导内容中变得显而易见。
20、在各方面中的一个或多个方面,相关系统包括但不限于用于执行本文引用的方法方面的电路和/或编程;电路和/或编程实际上可以是被配置为能够根据系统设计者的设计选择来影响本文引用的方法方面的硬件、软件和/或固件的任意组合。除上述内容之外,在诸如本公开的文本(例如,权利要求和/或具体实施方式)和/或附图的教导内容中列出和描述了各种其他方法和/或系统方面。
21、此外,应当理解,下述形式、形式表达、示例中的任何一个或多个可与下述其他形式、形式表达和示例中的任何一个或多个组合。
22、上述技术实现要素:仅为例示性的,并非旨在以任何方式进行限制。除了上述例示性方面、实施方案和特征,参考附图和下述具体实施方式,其他方面、实施方案和特征将变得显而易见。
本文地址:https://www.jishuxx.com/zhuanli/20240614/86854.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。