视网膜下注射手术机器人
- 国知局
- 2024-07-12 10:29:58
本发明属于显微手术机器人和微创手术机器人,特别是一种视网膜下注射手术机器人。
背景技术:
1、眼睛是人体最重要的感觉器官,大脑所获得的信息大部分都是从眼睛获得的。同时眼组织又是结构复杂且脆弱的,这导致眼科的眼底手术的操作十分复杂,对医生的手术技能提出了很高的要求。医生细微的误操作都会对眼球造成撕扯,影响手术的愈合。现如今,外科手术正在朝着微创化发展,眼科手术亦是如此,特别是玻璃体-视网膜眼科手术的技术正趋向小切口、无缝合技术系统方向发展。在眼科视网膜手术中,由于眼内可操作空间小、组织易损伤和手术操作复杂使得该类手术具有很高的操作难度。此外该类手术精度要求极高,术中的微力人手无法感知且人手存在生理震颤难以满足高精度手术的要求。在眼内注射环节上,人手无法保持稳定姿势完成长时间的微量注射。眼科手术机器人能够可靠地辅助医生完成高精度的眼科手术,改善手术条件,提高手术成功率并减少术后并发症。
2、根据操作方式不同,目前眼科手术机器人可分为:协同式操作机器人、主从式操作机器人与手持式操作机器人。
3、1、协同式眼科手术机器人使用过程中,医生通过手持机器人末端器械与机器人共同执行手术操作。协同式操作机器人提供了更贴合传统眼科手术的直观操作方式,降低了医生的使用难度。但手持的方式也使得机器人失去了运动缩放和远程操作的可能,此外协同式操作受惯量、摩擦等因素影响较大,且只能映射末端关节的运动状态不能直接映射器械末端的运动,增加了高精度操作的难度。
4、2、手持式眼科手术机器人使用过程中,医生同样直接手握器械执行手术操作,而与协同式操作机器人不同的是手持式操作机器人通常为形似传统手术器械的手柄装置,且不具备围绕手术实施点的位置约束。与现有手术器械外形相似,医生可延续传统手术操作方式,操作更直观,结构轻盈、尺寸便携。但其稳定性及精准度较差,未改善传统人工手术可靠性、安全性低的弊病,且多为一次性器械,重复利用性差。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的问题,提供一种视网膜下注射手术机器人。
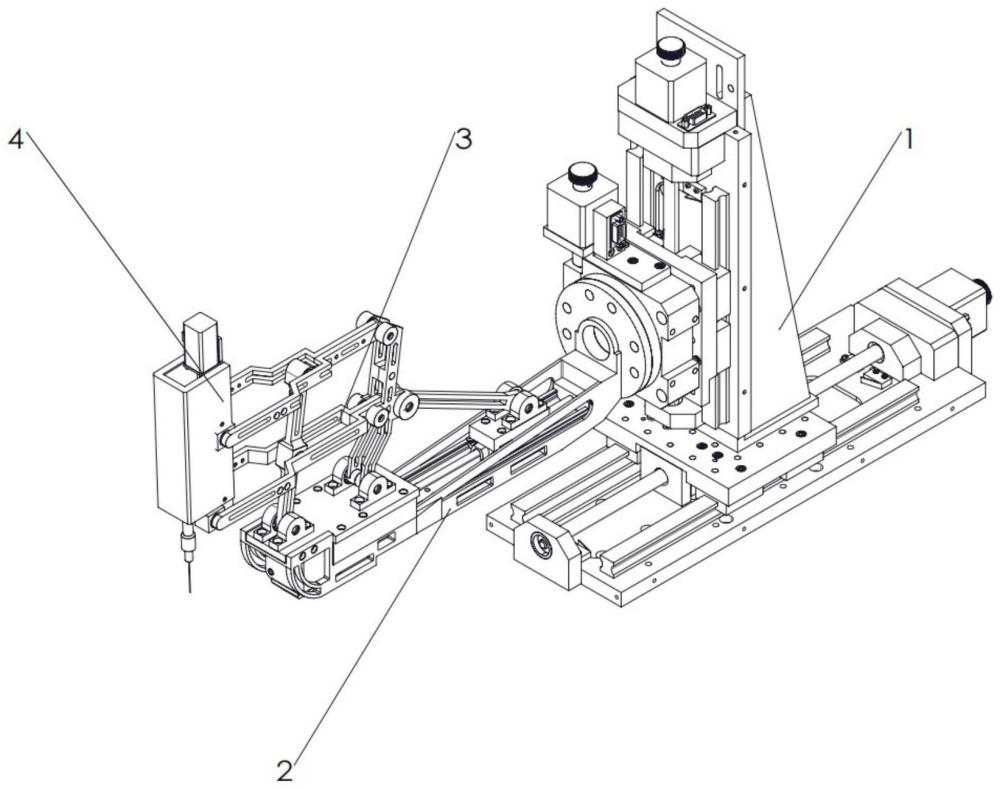
2、实现本发明目的的技术解决方案为:一种视网膜下注射手术机器人,所述机器人包括基座组件,设置在所述基座组件上的连杆组件,以及设置在所述连杆组件上的注射器组件;所述连杆组件为平行四边形结构,所述基座组件通过电机驱动丝杆运动、曲柄滑块传动的方式,带动所述连杆组件的平行四边形结构发生变动,使连杆组件带动注射器组件产生绕手术点的转动;所述注射组件根据手术需求设置注射时间和注射用量完成全自动注射。
3、进一步地,所述机器人还包括固定架组件,用于实现在xyz三个方向自由度调整机器人的起始位置。
4、进一步地,所述基座组件包括机架,以及安装在所述机架上的第一电机和第一丝杆组件,所述机架在安装于所述固定架组件上的第二电机的驱动下实现绕x轴方向自由转动,所述第一丝杆组件在所述第一电机的驱动下运动进而带动所述连杆组件工作;所述x轴方向为第二电机输出轴的轴向方向。
5、进一步地,所述第一丝杆组件包括丝杆底座、丝杆架、第一丝杆以及滑块,所述丝杆底座安装在所述机架上,所述丝杆架安装在所述丝杆底座上,所述第一丝杆安装在所述丝杆架上且沿所述丝杆架的轴向方向即x轴方向设置,并与所述第一电机的输出轴连接,所述滑块安装在所述第一丝杆上,且在第一丝杆的带动下进行直线运动。
6、进一步地,所述平行四边形结构位于沿x轴方向的平面内,在该平面内沿x轴的轴向方向运动。
7、进一步地,所述连杆组件包括第一连杆、第二连杆、第三连杆、第四连杆、第五连杆、第一轴承座、第一连接件、第二轴承座、第二连接件和第三轴承座;所述第一连杆、第二连杆、第三连杆、第四连杆形成平行四边形结构;
8、所述第一连接件安装在所述滑块上,所述第一轴承座安装在所述第一连接件上,所述第五连杆的一端与所述第一轴承座连接,且能自由转动;所述第二连接件安装在所述机架的末端,所述第二连接件上沿x轴方向同轴布置安装所述第二轴承座和第三轴承座,所述第四连杆的一端、第三连杆的一端分别与第二轴承座、第三轴承座连接,且均能自由转动;所述第四连杆的中部设置有两个轴承座,第五连杆的另一端、第一连杆的一端分别与两个轴承座相连,且能自由转动;所述第一连杆的中部与第三连杆的中部连接,所述第四连杆的另一端与所述第二连杆的一端连接,所述第二连杆的中部与第三连杆的另一端相连,且连杆之间均能相对自由转动;所述第一连杆的另一端、第二连杆的另一端安装所述注射器组件。
9、进一步地,所述第一连杆的另一端、第二连杆的另一端均设有支出阶梯轴,用于安装所述注射组件。
10、进一步地,所述注射器组件包括注射器、直线轴承、联轴器、第四轴承座、注射器底板和第二丝杆组件;所述注射器底板安装在所述连杆组件上,所述直线轴承通过第四轴承座安装在所述注射器底板上,所述注射器安装在所述直线轴承上,且其上套有联轴器,所述联轴器通过第三连接件与第二丝杆组件连接;所述第二丝杆组件工作时,带动所述联轴器推动所述注射器沿直线轴承方向移动完成注射。
11、进一步地,所述第二丝杆组件包括第三电机、第二丝杆和第二丝杆轴承;所述第三电机安装在所述注射器底板上,所述第二丝杆与所述第三电机的输出轴连接,所述第二丝杆轴承安装在所述第二丝杆上,且在第二丝杆的带动下进行直线运动,所述第二丝杆轴承通过所述第三连接件与所述联轴器相连。
12、本发明与现有技术相比,其显著优点为:
13、(1)根据传统手术方式对手术逻辑和运动方式进行设计,操作直观,缩短了医生的学习曲线。
14、(2)通过主从式的操作方式使得机器人能够实现运动缩放功能,消除人手生理震颤、提高了手术精度和可操作性。
15、(3)本视网膜下注射手术机器人主干部分采用曲柄滑块连杆结构,具有很高的运动精度和力学特性。
16、(4)通过仿真优化得到了适应视网膜下注射手术的平行四边形连杆尺寸结构。
17、(5)不同于双平面机构,本视网膜下手术机器人通过对驱动机构的重新集成设计,采用两个电机即可满足眼内手术的运动范围要求,极大缩小了控制难度,去除了冗余自由度和不必要的实体空间占用。
18、(6)在末端注射器结构上根据高精度视网膜下注射手术要求进行了独立设计,机器人到达指定手术位置后可通过末端执行器完成自动注射且能够维持注射角度,精准控制注射时间和用量。
19、(7)可适配性强,通过后续对末端执行器的设计改造,可在该机器人上实现微力反馈和震颤消除功能。与术中oct结合还可实现实时成像。
20、下面结合附图对本发明作进一步详细描述。
技术特征:1.一种视网膜下注射手术机器人,其特征在于,所述机器人包括基座组件,设置在所述基座组件上的连杆组件,以及设置在所述连杆组件上的注射器组件;所述连杆组件为平行四边形结构,所述基座组件通过电机驱动丝杆运动、曲柄滑块传动的方式,带动所述连杆组件的平行四边形结构发生变动,使连杆组件带动注射器组件产生绕手术点的转动;所述注射组件根据手术需求设置注射时间和注射用量完成全自动注射。
2.根据权利要求1所述的视网膜下注射手术机器人,其特征在于,所述机器人还包括固定架组件,用于实现在xyz三个方向自由度调整机器人的起始位置。
3.根据权利要求2所述的视网膜下注射手术机器人,其特征在于,所述基座组件包括机架,以及安装在所述机架上的第一电机和第一丝杆组件,所述机架在安装于所述固定架组件上的第二电机的驱动下实现绕x轴方向自由转动,所述第一丝杆组件在所述第一电机的驱动下运动进而带动所述连杆组件工作;所述x轴方向为第二电机输出轴的轴向方向。
4.根据权利要求3所述的视网膜下注射手术机器人,其特征在于,所述第一丝杆组件包括丝杆底座、丝杆架、第一丝杆以及滑块,所述丝杆底座安装在所述机架上,所述丝杆架安装在所述丝杆底座上,所述第一丝杆安装在所述丝杆架上且沿所述丝杆架的轴向方向即x轴方向设置,并与所述第一电机的输出轴连接,所述滑块安装在所述第一丝杆上,且在第一丝杆的带动下进行直线运动。
5.根据权利要求2所述的视网膜下注射手术机器人,其特征在于,所述平行四边形结构位于沿x轴方向的平面内,在该平面内沿x轴的轴向方向运动。
6.根据权利要求4所述的视网膜下注射手术机器人,其特征在于,所述连杆组件包括第一连杆、第二连杆、第三连杆、第四连杆、第五连杆、第一轴承座、第一连接件、第二轴承座、第二连接件和第三轴承座;所述第一连杆、第二连杆、第三连杆、第四连杆形成平行四边形结构;
7.根据权利要求6所述的视网膜下注射手术机器人,其特征在于,所述第一连杆的另一端、第二连杆的另一端均设有支出阶梯轴,用于安装所述注射组件。
8.根据权利要求1所述的视网膜下注射手术机器人,其特征在于,所述注射器组件包括注射器、直线轴承、联轴器、第四轴承座、注射器底板和第二丝杆组件;所述注射器底板安装在所述连杆组件上,所述直线轴承通过第四轴承座安装在所述注射器底板上,所述注射器安装在所述直线轴承上,且其上套有联轴器,所述联轴器通过第三连接件与第二丝杆组件连接;所述第二丝杆组件工作时,带动所述联轴器推动所述注射器沿直线轴承方向移动完成注射。
9.根据权利要求8所述的视网膜下注射手术机器人,其特征在于,所述第二丝杆组件包括第三电机、第二丝杆和第二丝杆轴承;所述第三电机安装在所述注射器底板上,所述第二丝杆与所述第三电机的输出轴连接,所述第二丝杆轴承安装在所述第二丝杆上,且在第二丝杆的带动下进行直线运动,所述第二丝杆轴承通过所述第三连接件与所述联轴器相连。
技术总结本发明公开了一种视网膜下注射手术机器人,包括基座组件,设置在基座组件上的连杆组件,以及设置在连杆组件上的注射器组件;连杆组件为平行四边形结构,基座组件通过电机驱动丝杆运动、曲柄滑块传动的方式,带动连杆组件的平行四边形结构发生变动,使连杆组件带动注射器组件产生绕手术点的转动;注射组件根据手术需求设置注射时间和注射用量完成全自动注射。本发明采用曲柄滑块传动机构驱动连杆,由丝杆传动和电机控制,只需要两个驱动组件即可满足手术所需移动范围和自由度,具有更高的运动精度和力学特性;通过仿真优化得到了适应视网膜下注射手术的平行四边形连杆尺寸结构;同时,在末端注射器结构上进行了独立设计,机器人到达指定手术位置后可通过末端执行器完成自动注射且能够维持注射角度,精准控制注射时间和用量。技术研发人员:韩世纪,严辰煜,李云耀,胡津源,樊金宇,史国华受保护的技术使用者:中国科学院苏州生物医学工程技术研究所技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/87309.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。