用于手术机器人的被动机械臂和手术机器人系统的制作方法
- 国知局
- 2024-07-12 10:38:51
本发明总地涉及手术机器人,具体而言涉及一种用于手术机器人的被动机械臂和具有其的手术机器人系统。
背景技术:
1、植介入造影手术中由于dsa会发出x射线,在这种情况下医生的体力下降较快,手术过程中容易出现失误。且长时间在该情况下工作会增加医生患白血病、癌症的机率,影响医生的身体健康。机器人介入手术能够解决以上问题,是未来的趋势。
2、在机器人进行植介入手术治疗的过程中,执行器代替医生将导丝导管输送器等相关手术器材输送导病人体内。执行器根据实际手术情况会有不同的姿态,且手术中为了确保安全,需要执行器能够与病人保持相对静止。即使手术中医生移动导管床,此时依然要确保执行器与病人保持原相对位置关系不变。这时就需要一款安全可靠的机械臂用于固定执行器,该机械臂应该具有足够的自由度用于调节执行器的姿态,能够非常牢固的固定执行器。
技术实现思路
1、在技术实现要素:部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为了至少部分地解决背景技术中的问题,本发明的第一个方面提供一种用于手术机器人的被动机械臂,其包括:
3、支座;
4、旋转臂,所述旋转臂连接至所述支座,并构造为围绕主旋转轴线相对于所述支座可旋转;
5、伸缩臂,所述伸缩臂连接至所述旋转臂,并构造为沿伸缩方向相对于所述旋转臂可伸缩,其中,所述伸缩方向不平行于所述主旋转轴线;
6、摆动臂,所述摆动臂包括摆动臂第一端和与所述摆动臂第一端相反的摆动臂第二端,所述摆动臂第一端连接至所述伸缩臂,所述摆动臂构造为沿摆动方向相对于所述伸缩臂可摆动,其中,所述摆动方向平行于由所述主旋转轴线和所述伸缩方向确定的平面;
7、第一旋转组件,所述第一旋转组件连接至所述摆动臂第二端,并构造为围绕第一旋转轴线相对于所述摆动臂可旋转,其中,所述第一旋转轴线平行于由所述主旋转轴线和所述伸缩方向确定的平面;
8、第二旋转组件,所述第二旋转组件连接至所述第一旋转组件,并构造为围绕第二旋转轴线相对于所述第一旋转组件可旋转,其中,所述第二旋转轴线与所述第一旋转轴线不平行;
9、安装组件,所述安装组件连接至所述第二旋转组件,用于安装手术执行器械;和
10、把手,所述把手设置至所述第二旋转组件,用于供用户操作以调整所述被动机械臂的姿态。
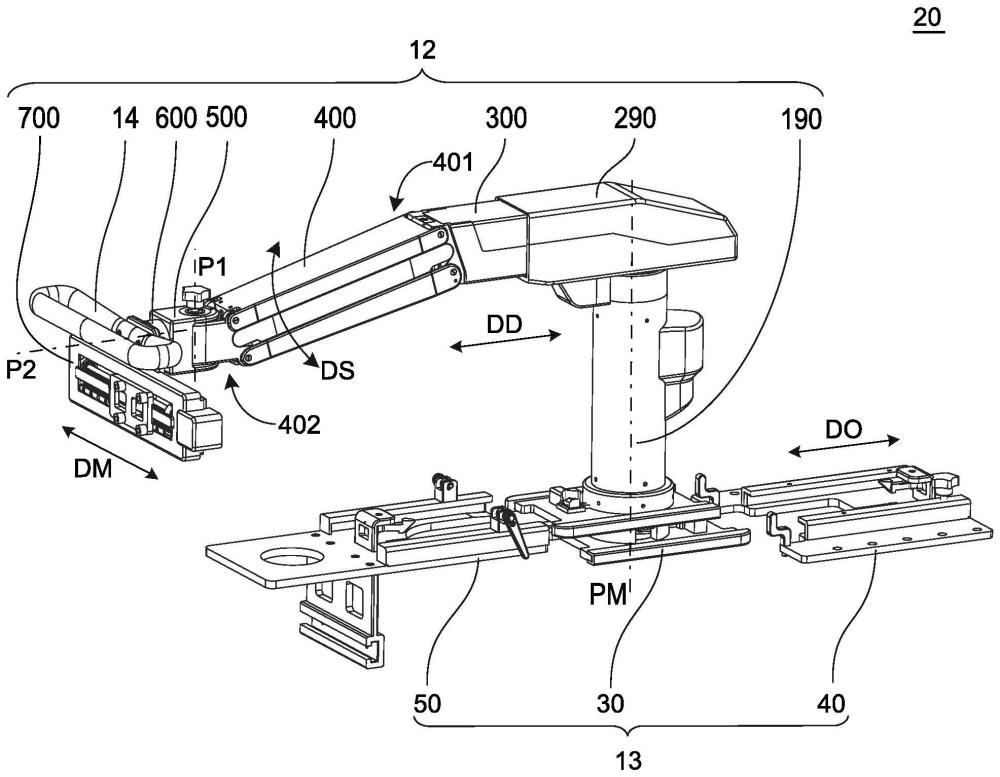
11、根据本发明的被动机械臂共有五个自由度,其中旋转臂的旋转运动、伸缩臂的伸缩运动和摆动臂的摆动运动用于调整机械臂前端(例如安装组件)相对于手术床的空间位置,第一旋转组件的旋转运动和第二旋转组件的旋转运动用于调整机械臂前端相对于手术床的角度,从而使末端手术执行器械相对于手术床具有适宜的姿态,有利于手术开展。
12、可选地,所述被动机械臂还包括末端制动装置和末端制动操作装置,
13、其中,所述末端制动操作装置供用户操作,当所述末端制动操作装置被操作时,所述末端制动操作装置接触所述末端制动装置并使得所述末端制动装置被操作,
14、其中,所述被动机械臂构造为,当所述末端制动装置被操作时,所述摆动臂、所述第一旋转组件和所述第二旋转组件被同时制动。
15、根据本发明的被动机械臂,可以通过末端制动装置将摆动臂、第一旋转组件和第二旋转组件同时制动,操作简便。
16、可选地,所述摆动臂包括:
17、第一臂,所述第一臂包括第一臂第一端和与所述第一臂第一端相反的第一臂第二端,所述第一臂第一端在所述伸缩臂的第一位置可枢转地连接至所述伸缩臂;
18、第二臂,所述第二臂包括第二臂第一端和与所述第二臂第一端相反的第二臂第二端,所述第二臂第一端在所述伸缩臂的第二位置可枢转地连接至所述伸缩臂,所述第二臂连接至所述第一臂,其中所述第二位置与所述第一位置不同;和
19、摆动臂座,连接至所述第一臂第二端和所述第二臂第二端,所述摆动臂座还连接至所述把手,其中,所述第一臂第二端在所述摆动臂座的第三位置可枢转地连接至所述摆动臂座,所述第二臂第二端在所述摆动臂座的第四位置可枢转地连接至所述摆动臂座,
20、其中,所述被动机械臂构造为,当用户操作所述把手使所述摆动臂座相对于所述第一臂和所述第二臂均转动时,所述第一臂相对于所述第二臂移动,使得所述第一臂和所述第二臂相对于所述伸缩臂均转动。
21、进一步,所述第一臂相对于所述摆动臂座枢转的轴线、所述第一臂相对于所述伸缩臂枢转的轴线、所述第二臂相对于所述摆动臂座枢转的轴线和所述第二臂相对于所述伸缩臂枢转的轴线均相互平行。
22、根据本发明的被动机械臂,摆动臂的构造等同于一个四边形,其中,第一臂与伸缩臂的枢转连接点、第一臂与摆动臂座的枢转连接点、第二臂与伸缩臂的枢转连接点和第二臂与摆动臂座的枢转连接点构成该四边形的四个顶点,该四边形的四条边长不变,摆动臂通过改变该四边形的四个内角的角度实现摆动运动。
23、可选地,所述第一旋转组件连接至所述摆动臂座,所述第一旋转组件构造为围绕所述第一旋转轴线相对于所述摆动臂座可旋转。
24、根据本发明的被动机械臂,第一旋转组件构造为围绕第一旋转轴线相对于摆动臂的摆动臂座可旋转。
25、可选地,所述末端制动装置包括:
26、摆动臂制动装置,设置至所述摆动臂座并可操作地连接至所述第二臂,当所述摆动臂制动装置被操作时,所述摆动臂制动装置接触所述第二臂,使得所述摆动臂座相对于所述第二臂不可转动;
27、第一旋转组件制动装置,设置至所述摆动臂座并可操作地连接至所述第一旋转组件,当所述第一旋转组件制动装置被操作时,所述第一旋转组件制动装置接触所述第一旋转组件,使得所述第一旋转组件相对于所述摆动臂座不可旋转;和
28、第二旋转组件制动装置,连接至所述第一旋转组件制动装置并可操作地连接至所述第二旋转组件,当所述第二旋转组件制动装置被操作时,所述第二旋转组件制动装置接触所述第二旋转组件,使得所述第二旋转组件相对于所述第一旋转组件不可旋转,
29、其中,所述被动机械臂构造为,当所述末端制动操作装置被操作时,所述摆动臂制动装置、所述第一旋转组件制动装置和所述第二旋转组件制动装置被同时操作。
30、根据本发明的被动机械臂,末端制动装置包括分别用于制动摆动臂的摆动臂制动装置、用于制动第一旋转组件的第一旋转组件制动装置和用于制动第二旋转组件的第二旋转组件制动装置,各个制动装置根据各个自由度的形成机制对应设置。
31、可选地,所述摆动臂座包括制动通道;
32、所述末端制动操作装置设置在所述制动通道中,
33、其中,所述被动机械臂构造为,当所述末端制动操作装置位于所述制动通道中并被用户操作时,所述末端制动操作装置接触所述摆动臂座制动装置和所述第一旋转组件制动装置,使得所述摆动臂制动装置、所述第一旋转组件制动装置和所述第二旋转组件制动装置被同时操作。
34、根据本发明的被动机械臂,末端制动操作装置直接作用于摆动臂座制动装置和第一旋转组件制动装置,通过内部机制间接作用于第二旋转组件制动装置。
35、可选地,所述第二臂包括固定块,所述固定块设置在所述第二臂第二端,所述固定块包括第一圆弧表面;
36、所述摆动臂座还包括:
37、第一顶杆通道,所述第一顶杆通道的延伸方向不平行于所述制动通道的延伸方向,所述第一顶杆通道的一端与所述制动通道连通,
38、滑槽,设置至所述摆动臂座的用于朝向所述摆动臂的一端,所述滑槽位于所述第一顶杆通道的与所述制动通道相反的一侧,
39、制动滑块,设置至所述滑槽并位于所述滑槽与所述第一顶杆通道之间,并沿所述滑槽的延伸方向相对于所述滑槽可移动,所述制动滑块包括用于接触所述第一圆弧表面的第二圆弧表面,所述第一圆弧表面与所述第二圆弧表面均以所述第二臂第二端相对于所述摆动臂座枢转的枢转轴线为轴,其中所述第一圆弧表面与所述第二圆弧表面中的一个为凸表面、另一个为凹表面;
40、所述摆动臂制动装置构造为第一顶杆,所述第一顶杆设置在所述第一顶杆通道中并沿所述第一顶杆通道的延伸方向相对于所述第一顶杆通道可移动,所述第一顶杆的长度大于所述第一顶杆通道的长度,所述第一顶杆包括用于进入所述制动通道的第一顶杆第二端和与所述第一顶杆第二端相反的第一顶杆第一端,
41、其中,所述第一顶杆第一端包括第一顶杆第一端表面,所述制动滑块包括用于朝向所述第一顶杆的滑块表面,所述第一顶杆第一端表面与所述滑块表面中的至少一个构造为倾斜表面,
42、其中,所述被动机械臂构造为,当所述末端制动操作装置位于所述制动通道中并被用户操作时,所述末端制动操作装置接触所述第一顶杆第二端,使得所述第一顶杆朝向所述滑槽移动并接触所述制动滑块,所述制动滑块在所述倾斜表面的所用下相对于所述滑槽移动,使得所述第二圆弧表面接触所述第一圆弧表面,从而使所述滑槽相对于所述固定块不可旋转。
43、根据本发明的被动机械臂,摆动臂制动装置的作用机制为使上述的摆动臂的四边形的其中一个内角的角度不可改变,因该四边形的四条边长不变,因此当一个内角被锁定后其余三个内角也被锁定,从而摆动臂的姿态被锁定。
44、可选地,所述第一圆弧表面与所述第二圆弧表面设置有使所述第一圆弧表面与所述第二圆弧表面彼此啮合的锯齿,所述锯齿的齿牙与齿槽的延伸方向平行于所述第二臂第二端相对于所述摆动臂座枢转的所述枢转轴线。
45、根据本发明的被动机械臂,第一圆弧表面与第二圆弧表面设置有匹配的锯齿,第一圆弧表面与第二圆弧表面接触时锯齿互相咬合,使得摆动臂的制动更加稳固。
46、可选地,所述的被动机械臂还包括第一弹簧,所述第一弹簧设置至所述摆动臂座,所述摆动臂座构造为使得所述第一弹簧向所述第二圆弧表面施加弹性力,以使所述第二圆弧表面与所述第一圆弧表面解除接触。
47、根据本发明的被动机械臂,当制动力撤销后,第一弹簧使制动滑块离开固定块,从而使摆动臂恢复自由度。
48、可选地,所述摆动臂座还包括第二顶块通道,所述第二顶块通道的延伸方向不平行于所述制动通道的延伸方向,所述第二顶块通道的一端与所述制动通道连通,所述第二顶块通道的另一端朝向所述第一旋转组件;
49、所述第一旋转组件制动装置构造为第二顶块,所述第二顶块包括用于朝向所述制动通道的第二顶块第一端部和与所述第二顶块第一端部相反的第二顶块第二端部,所述第二顶块的长度大于所述第二顶块通道的长度,所述第二顶块第一端部设置在所述第二顶块通道中,所述第二顶块沿所述第二顶块通道的延伸方向相对于所述第二顶块通道可移动,
50、其中,所述被动机械臂构造为,当所述末端制动操作装置位于所述制动通道中并被用户操作时,所述末端制动操作装置还接触所述第二顶块第一端部,使得所述第二顶块朝向所述第一旋转组件移动,以使所述第二顶块第二端部接触所述第一旋转组件,从而使所述第一旋转组件相对于所述摆动臂座不可旋转。
51、根据本发明的被动机械臂,当施加制动时,通过第二顶块将摆动臂座与第一旋转组件连接为一体,从而使得第一旋转组件不能相对于摆动臂座转动,也即制动第一旋转组件。
52、可选地,所述第二顶块第二端部包括以所述第一旋转轴线为轴的第三圆弧表面。
53、根据本发明的被动机械臂,由于第一旋转组件围绕第一旋转轴线相对于摆动臂座可转动,第二顶块的用于接触第一旋转组件的表面设置为以第一旋转轴线为轴的圆弧表面,以便于第一旋转组件相对于摆动臂座位于不同的旋转角度时均能制动第一旋转组件。
54、可选地,所述第一旋转组件包括弹簧顶块通道,所述弹簧顶块通道的一端朝向所述第二顶块第二端部,所述弹簧顶块通道的另一端朝向所述第二旋转组件;
55、所述第二旋转组件制动装置包括:
56、弹簧顶块,所述弹簧顶块设置在所述弹簧顶块通道中并沿所述弹簧顶块通道的延伸方向相对于所述弹簧顶块通道可移动,所述弹簧顶块通道包括弹簧槽,所述弹簧槽的延伸方向平行于所述弹簧顶块通道的延伸方向,
57、第二组件,所述第二组件设置在所述弹簧顶块的用于朝向所述第二旋转组件的一侧,所述第二组件位于所述弹簧顶块与所述第二旋转组件之间,所述第二组件沿所述弹簧顶块通道的延伸方向相对于所述第一旋转组件可移动,和
58、第二弹簧,设置在所述弹簧槽中,所述第二弹簧的一端抵靠所述第二组件,所述第二弹簧的另一端抵靠所述弹簧槽的底壁,使得所述弹簧顶块接触所述第二顶块第二端部,
59、其中,所述被动机械臂构造为,当所述末端制动操作装置位于所述制动通道中并被用户操作时,所述末端制动操作装置还接触所述第二顶块第一端部,使得所述第二顶块相对于所述第二顶块通道移动,以使所述第二顶块第二端部驱动所述弹簧顶块朝向所述第二组件移动,使得所述第二组件在所述第二弹簧的弹性力作用下朝向所述第二旋转组件移动并接触所述第二旋转组件,从而使所述第二旋转组件相对于所述第一旋转组件不可旋转。
60、根据本发明的被动机械臂,第二旋转组件制动装置(包括弹簧顶块、第二弹簧和第二组件)连接在第一旋转组件和第二旋转组件之间,当用户施加制动力时,末端制动操作装置通过第一旋转组件制动装置连接至第二旋转组件制动装置,使第二旋转组件制动装置将第一旋转组件与第二旋转组件连接为一体,使得第二旋转组件不能相对于第一旋转组件转动,也即将第二旋转组件制动。同时,当制动力撤销后,第二弹簧的弹性力可以将第二顶块顶离第一旋转组件,使第一旋转组件恢复自由度。
61、可选地,所述第二组件的用于朝向所述第二旋转组件的一侧设置有鼠牙,所述第二旋转组件的用于朝向所述第二组件的一侧设置有鼠牙。
62、根据本发明的被动机械臂,第二旋转组件与第二旋转组件制动装置均设置有鼠牙,当第二旋转组件制动装置接触第二旋转组件时,鼠牙相互咬合,使得第二旋转组件的制动更稳固。
63、可选地,所述的被动机械臂还包括第三弹簧,所述第三弹簧设置在所述第二旋转组件与所述第二组件之间,所述第三弹簧的一端抵靠所述第二旋转组件,所述第三弹簧的另一端抵靠所述第二组件。
64、根据本发明的被动机械臂,当制动力撤销后,第三弹簧用于将第二旋转组件制动装置顶离第二旋转组件,从而使第二旋转组件恢复自由度。
65、可选地,所述第一顶杆通道与所述第二顶块通道相对设置,并且所述制动通道的延伸方向垂直于所述第一顶杆通道的延伸方向与所述第二顶块通道的延伸方向。
66、进一步,所述制动通道包括:
67、通道开口,设置在所述摆动臂座的表面,和
68、螺纹部,所述螺纹部设置有内螺纹;
69、所述末端制动操作装置包括:
70、制动螺栓,所述制动螺栓包括与所述内螺纹匹配的外螺纹,和
71、制动头,所述制动头设置在所述制动通道中,并沿所述制动通道的延伸方向相对于所述制动通道可移动,其中所述制动头比所述螺纹部远离所述通道开口,所述制动头的远离所述通道开口的一端包括锥形表面,所述锥形表面朝向所述第一顶杆通道与所述制动通道的交汇口和所述第二顶块通道与所述制动通道的交汇口,
72、其中,所述被动机械臂构造为,当所述制动螺栓被从所述通道开口旋入所述制动通道时,所述制动螺栓接触所述制动头并使所述制动头相对于所述制动通道移动,从而使所述锥形表面接触所述第一顶杆第二端和所述第二顶块第一端部。
73、根据本发明的被动机械臂,制动操作装置操作制动装置的方法简单有效。
74、可选地,所述第一顶杆第二端包括与所述锥形表面匹配的倾斜表面,并且/或者所述第二顶块第一端部包括与所述锥形表面匹配的倾斜表面。
75、根据本发明的被动机械臂,制动操作装置与制动装置通过倾斜表面相配合,可以有效保证制动操作装置操作制动装置的稳定性。
76、可选地,所述摆动臂座还包括:
77、第一旋转轴通道,所述第一旋转轴通道沿所述第一旋转轴线的方向延伸;
78、第一组件旋转轴,所述第一组件旋转轴设置在所述第一旋转轴通道中,所述第一组件旋转轴连接至所述第一旋转组件,所述第一组件旋转轴的轴线为所述第一旋转轴线,所述第一旋转组件构造为围绕所述第一旋转轴线相对于所述第一组件旋转轴可旋转,
79、其中,所述制动通道沿所述第一旋转轴线的延伸方向设置至所述第一旋转轴,形成所述第一组件旋转轴的空心结构。
80、根据本发明的被动机械臂,摆动臂座结构紧凑。
81、可选地,所述的被动机械臂还包括气弹簧,所述气弹簧的一端在所述第三位置处可枢转地连接至所述第一臂第二端和所述摆动臂座,所述气弹簧的另一端在所述第二位置处可枢转地连接至所述第二臂第一端和所述摆动臂座。
82、进一步,所述的被动机械臂还包括限位块,所述限位块设置至所述伸缩臂,用于限制所述第一臂相对于所述伸缩臂的旋转角度。
83、根据本发明的被动机械臂,气弹簧相当于摆动臂的四边形的对角线,气弹簧的一端设置在伸缩臂,另一端用于向摆动臂的第一臂施加旋转力,同时通过限位块限制第一臂相对于伸缩臂的旋转角度。
84、可选地,所述主旋转轴线垂直于所述伸缩方向,并且/或者所述第一旋转轴线垂直于所述第二旋转轴线。
85、根据本发明的被动机械臂,其各个自由度的运动方向设置合理。
86、可选地,所述被动机械臂构造为使得所述旋转臂与所述伸缩臂被同时制动。
87、根据本发明的被动机械臂,旋转臂与伸缩臂也可以被同时制动,从而机械臂的五个自由度均可以被锁定,使机械臂得以保持所需的姿态。
88、可选地,所述安装组件包括:
89、基板,所述基板附接至所述第二旋转组件,并与所述第二旋转组件围绕所述第二旋转轴线相对于所述第一旋转组件同步旋转;
90、移动块,所述移动块连接至所述基板,所述移动块沿平移方向相对于所述基板可平移;和
91、转接块,用于连接所述手术执行器械,所述转接块可拆卸地连接至所述移动块并与所述移动块沿所述平移方向相对于所述基板同步平移。
92、进一步,所述安装组件还包括驱动组件,用于驱动所述移动块沿所述平移方向相对于所述基板平移。
93、进一步,所述驱动组件包括:
94、电机,设置至所述基板,用于提供驱动力;
95、丝杠,设置至所述基板,所述丝杠连接至所述电机的输出轴,所述丝杠沿所述平移方向延伸;和
96、丝杆螺母,设置至所述移动块,所述丝杠螺母与所述丝杠相匹配;和
97、控制器,耦连至所述电机,用于控制所述电机工作。
98、根据本发明的被动机械臂,安装组件可以协助手术执行器械移动,以协助手术操作。
99、可选地,所述安装组件还包括:
100、导轨,设置至所述基板,所述导轨沿所述平移方向延伸;和
101、移动滑块,设置至所述移动块并连接至所述导轨,所述移动滑块构造为沿所述平移方向相对于所述导轨可平移。
102、根据本发明的被动机械臂,通过导轨和移动滑块导向移动块的平移运动,使移动块得平移运动更加稳定。
103、可选地,所述安装组件还包括限位传感器,所述限位传感器设置至所述基板,所述限位传感器耦连至所述控制器,
104、所述安装组件配置为,当所述移动块沿所述平移方向相对于所述基板平移至第一限位位置时,所述移动块触发所述限位传感器,所述控制器接收到所述触发信号后控制所述电机停止工作。
105、进一步,所述限位传感器为光电传感器。
106、根据本发明的被动机械臂,限位传感器用于提供限位保护。
107、可选地,所述安装组件还包括机械限位件,所述机械限位件设置至所述基板,
108、所述安装组件配置为,当所述移动块沿所述平移方向相对于所述基板平移至第二限位位置时,所述移动块接触所述机械限位件,使得所述移动块被所述机械限位件阻挡而不能沿原移动方向继续移动,
109、其中,所述移动块在沿所述平移方向相对于所述基板平移至第二限位位置的过程中经过所述第一限位位置。
110、根据本发明的被动机械臂,机械限位件用于在限位传感器发生故障时提供限位保护。
111、本发明的第二方面提供一种手术机器人系统,其包括:
112、根据上述任一项技术方案所述的被动机械臂;和
113、手术执行器械,附接至所述安装组件。
114、根据本发明的手术机器人系统,手术执行器械安装至被动机械臂的前端。其中,被动机械臂共有五个自由度,其中旋转臂的旋转运动、伸缩臂的伸缩运动和摆动臂的摆动运动用于调整机械臂前端的手术执行器械相对于手术床的空间位置,第一旋转组件的旋转运动和第二旋转组件的旋转运动用于调整机械臂前端的手术执行器械相对于手术床的角度,从而使末端手术执行器械相对于手术床具有适宜的姿态,有利于手术开展。
本文地址:https://www.jishuxx.com/zhuanli/20240614/88267.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表