一种便于压迫手臂的绷带缠绕机的制作方法
- 国知局
- 2024-07-12 10:39:25
本发明涉及绷带缠绕机,具体为一种便于压迫手臂的绷带缠绕机。
背景技术:
1、包扎是外伤现场应急处理的重要措施之一,在有出血的情况下,外伤包扎的实施必须以止血为前提,如不及时止血,则可造成严重失血、休克,甚至危及生命,及时正确的包扎,可以达到压迫止血、减少感染、保护伤口、减少疼痛,以及固定敷料和夹板等目的。
2、在医院中,有些患者需要定期的更换纱布绷带对创面进行包裹,首先患者需要把手臂伸入到纱布缠绕机中,通过机器带动纱布卷围绕着手臂转动,把纱布缠绕在手臂上。但是在使用缠绕机时,每个患者胳膊的粗细的不同,对手臂的压迫力不同,可能会造成疼痛加剧或者绷带松弛,对创面造成二次伤害,为此,我们提出一种便于压迫手臂的绷带缠绕机。
技术实现思路
1、本发明的目的在于提供一种便于压迫手臂的绷带缠绕机,以解决上述背景技术中提出的问题。
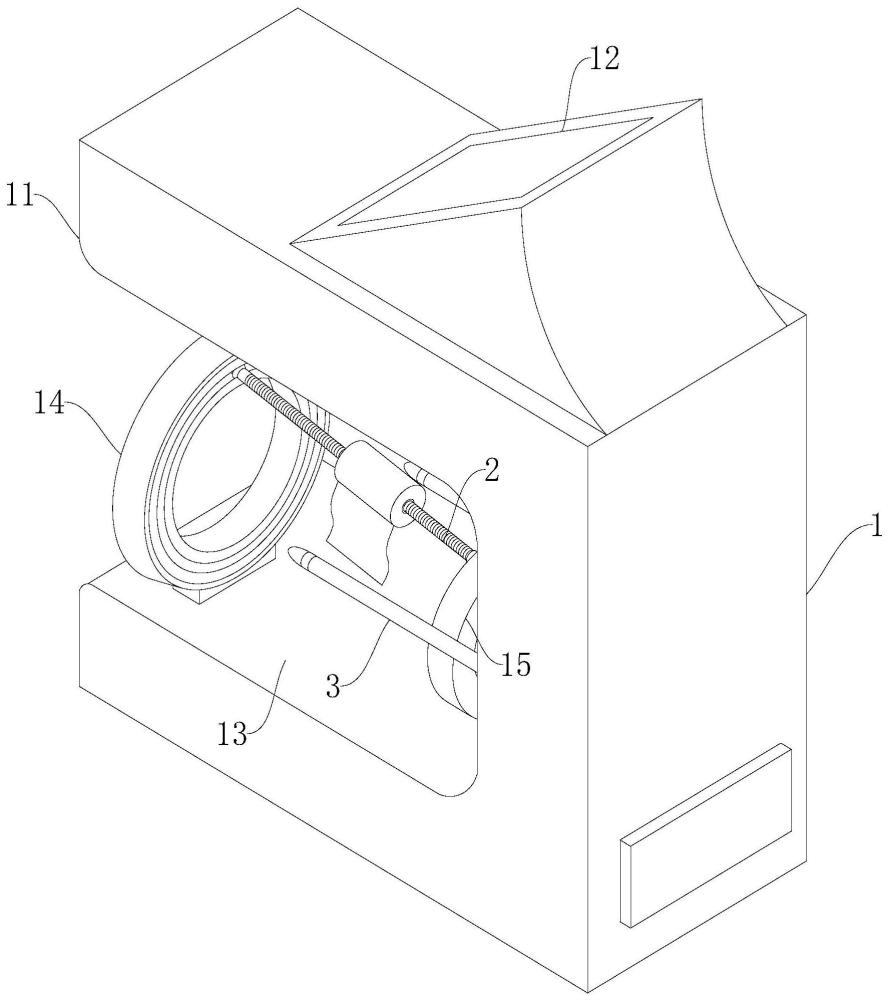
2、为实现上述目的,本发明提供如下技术方案:一种便于压迫手臂的绷带缠绕机,包括:缠绕机主体,缠绕机主体包括机箱,机箱上设置有智能控制屏,机箱的内部开设有侧臂槽,侧臂槽的内部固定设置有臂环一,臂环一的一侧设置有臂环二,
3、还包括缠绕机构,缠绕机构设置在臂环二上,缠绕机构沿着述臂环一和臂环二转动把纱布缠绕在患者的手臂上;
4、压迫机构,压迫机构设置在臂环二的两侧,通过压迫机构把绕在压迫机构上的纱布紧紧压迫在患者的手臂上,并且对缠绕机构缠绕纱布时进行定位;
5、调节机构,调节机构设置在臂环一内壁,通过患者手臂对调节机构的挤压控制缠绕机构缠绕纱布的角度,使纱布适应患者的胳膊。
6、其中,缠绕机构包括导向丝杆,导向丝杆的外部套设有纱布卷,导向丝杆的一端固定设置有限位环,导向丝杆的另一端固定设置有万向轴,万向轴的另一端设置有驱动马达一。
7、其中,驱动马达一的另一端固定设置有驱动齿轮,驱动齿轮的外部设置有驱动齿环,驱动齿环的下方设置有驱动马达二。
8、其中,驱动齿环的内壁和外壁均开设有齿牙槽,且驱动齿环分别与驱动齿轮和驱动马达二的齿盘相互啮合,驱动马达二和驱动马达一二者均与智能控制屏的智能系统连接。
9、其中,调节机构包括若干个等距均匀分布的受力柱,受力柱的外部套设置有弹簧,受力柱的底部设置有与臂环一内部固定连接开关,若干个开关与若干个受力柱一一对应,且若干个开关通过导线与智能控制屏的智能系统连接。
10、其中,开关的下方设置有膨胀气环,膨胀气环的输入端通过软管连接有连接头一,连接头一的另一端设置有气泵,且气泵通过连接头一和软管与膨胀气环相互连通,气泵通过导线与智能控制屏的智能系统连接。
11、其中,连接头一上固定设置有收合筒一,收合筒一的内部活动设置有阻挡球,阻挡球上固定设置有拉线一,拉线一的另一端固定设置有电磁铁一,且电磁铁一通过导线与若干个开关连接,阻挡球的直径尺寸大于连接头一的内部直径尺寸。
12、其中,压迫机构包括压带柱,压带柱的一端设置有与机箱固定连接的组装头,组装头的输入端通过软管设置有连接头二,连接头二通过软管与压带柱相互连通。
13、其中,连接头二上固定设置有收合筒二,收合筒二中穿设有拉线二,拉线二的两端分别固定设置有配置球和电磁铁二。
14、其中,压带柱的外壁固定设置有膨胀柱。
15、本发明至少具备以下有益效果:
16、本发明在医院中,如果有患者使用缠绕机主体快速对纱布进行缠绕时,首先,患者需要把纱布头先在压迫机构上多缠绕几圈,之后患者把手臂上的创面紧紧的贴在纱布上,患者可以根据实际需求把胳膊压在压迫机构撑开的纱布上或者放在纱布的上方,以此可以在缠绕纱布前对患者的创面进行压迫,起到保护患者创面的作用,之后通过调节机构对患者胳膊的粗细程度进行检测,使缠绕机构自动适应患者手臂,最后通过缠绕机构把纱布缠绕在患者的胳膊上,有利于缠绕机构在缠绕纱布时自动的适用于患者胳膊由粗变细,保证缠绕纱布的稳定性和安全性。
技术特征:1.一种便于压迫手臂的绷带缠绕机,
2.根据权利要求1所述的便于压迫手臂的绷带缠绕机,其特征在于:所述缠绕机构(2)包括导向丝杆(21),所述导向丝杆(21)的外部套设有纱布卷(22),所述导向丝杆(21)的一端固定设置有限位环(23),所述导向丝杆(21)的另一端固定设置有万向轴(26),所述万向轴(26)的另一端设置有驱动马达一(24)。
3.根据权利要求2所述的便于压迫手臂的绷带缠绕机,其特征在于:所述驱动马达一(24)的另一端固定设置有驱动齿轮(25),所述驱动齿轮(25)的外部设置有驱动齿环(27),所述驱动齿环(27)的下方设置有驱动马达二(28)。
4.根据权利要求3所述的便于压迫手臂的绷带缠绕机,其特征在于:所述驱动齿环(27)的内壁和外壁均开设有齿牙槽,且驱动齿环(27)分别与驱动齿轮(25)和驱动马达二(28)的齿盘相互啮合,所述驱动马达二(28)和驱动马达一(24)二者均与智能控制屏(12)的智能系统连接。
5.根据权利要求1所述的便于压迫手臂的绷带缠绕机,其特征在于:所述调节机构(4)包括若干个等距均匀分布的受力柱(41),所述受力柱(41)的外部套设置有弹簧(42),所述受力柱(41)的底部设置有与臂环一(14)内部固定连接开关(43),若干个所述开关(43)与若干个受力柱(41)一一对应,且若干个开关(43)通过导线与智能控制屏(12)的智能系统连接。
6.根据权利要求5所述的便于压迫手臂的绷带缠绕机,其特征在于:所述开关(43)的下方设置有膨胀气环(44),所述膨胀气环(44)的输入端通过软管连接有连接头一(45),所述连接头一(45)的另一端设置有气泵(47),且气泵(47)通过连接头一(45)和软管与膨胀气环(44)相互连通,所述气泵(47)通过导线与智能控制屏(12)的智能系统连接。
7.根据权利要求6所述的便于压迫手臂的绷带缠绕机,其特征在于:所述连接头一(45)上固定设置有收合筒一(46),所述收合筒一(46)的内部活动设置有阻挡球(48),所述阻挡球(48)上固定设置有拉线一(401),所述拉线一(401)的另一端固定设置有电磁铁一(49),且电磁铁一(49)通过导线与若干个开关(43)连接,所述阻挡球(48)的直径尺寸大于连接头一(45)的内部直径尺寸。
8.根据权利要求1所述的便于压迫手臂的绷带缠绕机,其特征在于:所述压迫机构(3)包括压带柱(31),所述压带柱(31)的一端设置有与机箱(11)固定连接的组装头(32),所述组装头(32)的输入端通过软管设置有连接头二(33),所述连接头二(33)通过软管与压带柱(31)相互连通。
9.根据权利要求8所述的便于压迫手臂的绷带缠绕机,其特征在于:所述连接头二(33)上固定设置有收合筒二(34),所述收合筒二(34)中穿设有拉线二(35),所述拉线二(35)的两端分别固定设置有配置球和电磁铁二(36)。
10.根据权利要求8所述的便于压迫手臂的绷带缠绕机,其特征在于:所述压带柱(31)的外壁固定设置有膨胀柱(37)。
技术总结本发明涉及绷带缠绕机技术领域,具体公开了一种便于压迫手臂的绷带缠绕机,包括:缠绕机主体,还包括缠绕机构,缠绕机构设置在臂环二上;压迫机构,压迫机构设置在臂环二的两侧;调节机构,调节机构设置在臂环一内壁。本发明患者可以根据实际需求把胳膊压在压迫机构撑开的纱布上或者放在纱布的上方,以此可以在缠绕纱布前对患者的创面进行压迫,起到保护患者创面的作用,之后通过调节机构对患者胳膊的粗细程度进行检测,使缠绕机构自动适应患者手臂,最后通过缠绕机构把纱布缠绕在患者的胳膊上,有利于缠绕机构在缠绕纱布时自动的适用于患者胳膊由粗变细,保证缠绕纱布的稳定性和安全性。技术研发人员:王青天,付秋燕受保护的技术使用者:王青天技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/88331.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。