密集障碍物区域的清扫方法与流程
- 国知局
- 2024-07-10 17:29:28
本申请涉及机器人,特别涉及一种密集障碍物区域的清扫方法。
背景技术:
1、清洁机器人通常需要对清扫的环境进行覆盖清扫,清扫覆盖区域包括家庭环境常见的角落、椅脚周围、桌子脚周围等等。在家庭环境中,椅脚之间和桌子脚之间都是较为狭小的可通行区域,可以将椅脚和桌子脚视为密集分布的障碍物。
2、由于清洁机器人受到传感器和地图漂移误差的影响后,椅脚之间的空隙、桌子脚之间的空隙、桌子腿与椅子腿之间的空隙等区域都会成为清洁机器人按照地图导航时不容易遍历到的区域位置,从而容易在这些区域位置产生漏扫。
技术实现思路
1、本申请实施例的目的在于提供一种密集障碍物区域的清扫方法,用于借助摄像头采集的图像数据和激光雷达获取雷达数据,实现良好的清洁效果。
2、本申请提供了一种密集障碍物区域的清扫方法,所述机器人搭载有激光雷达和摄像头,包括:
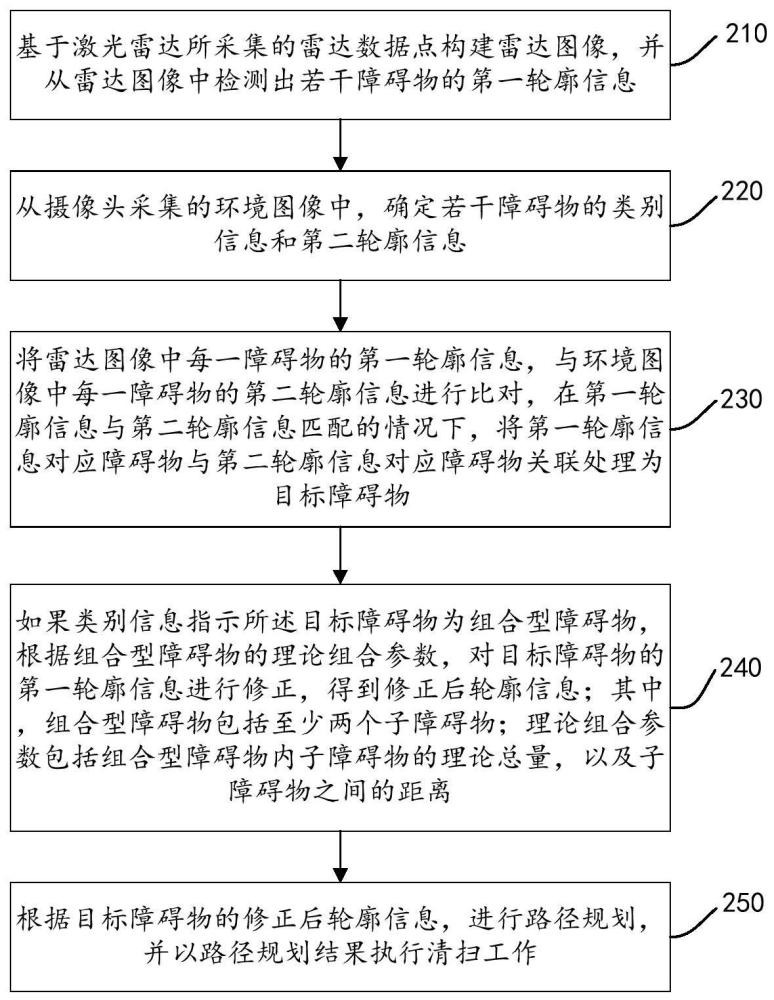
3、基于所述激光雷达所采集的雷达数据点构建雷达图像,并从所述雷达图像中检测出若干障碍物的第一轮廓信息;
4、从所述摄像头采集的环境图像中,确定若干障碍物的类别信息和第二轮廓信息;
5、将所述雷达图像中每一障碍物的第一轮廓信息,与所述环境图像中每一障碍物的第二轮廓信息进行比对,在所述第一轮廓信息与所述第二轮廓信息匹配的情况下,将所述第一轮廓信息对应障碍物与所述第二轮廓信息对应障碍物关联处理为目标障碍物;
6、如果所述类别信息指示所述目标障碍物为组合型障碍物,根据所述组合型障碍物的理论组合参数,对所述目标障碍物的第一轮廓信息进行修正,得到修正后轮廓信息;其中,所述组合型障碍物包括至少两个子障碍物;所述理论组合参数包括所述组合型障碍物内子障碍物的理论总量,以及子障碍物之间的距离;
7、根据所述目标障碍物的修正后轮廓信息,进行路径规划,并以路径规划结果执行清扫工作。
8、在一实施例中,所述从所述雷达图像中检测出若干障碍物的第一轮廓信息,包括:
9、对所述雷达图像中雷达数据点进行聚类处理,获得若干障碍物区域;其中,所述障碍物区域为障碍物在雷达图像中占据的区域;
10、对每一障碍物区域进行边缘检测,获得对应的第一轮廓信息。
11、在一实施例中,所述从所述摄像头采集的环境图像中,确定若干障碍物的类别信息和第二轮廓信息,包括:
12、对所述摄像头采集的环境图像进行目标检测,获得所述环境图像中若干障碍物的类别信息和像素位置;
13、基于所述环境图像中每一障碍物的像素位置,对所述障碍物进行边缘检测,得到对应的第二轮廓信息。
14、在一实施例中,所述根据所述组合型障碍物的理论组合参数,对所述目标障碍物的第一轮廓信息进行修正处理,得到修正后轮廓信息,包括:
15、若组合型障碍物中子障碍物的数量与所述理论总量不匹配,则对各子障碍物之间的距离进行计算,判断离群点;
16、对所述离群点进行过滤,得到与所述理论总量相匹配数量的子障碍物,作为修正后的组合型障碍物轮廓信息。
17、在一实施例中,所述对各子障碍物之间的距离进行计算,判断离群点,包括:
18、若子障碍物之间的距离小于预设距离,且子障碍物出现在组合型障碍物区域中间位置,则判定该子障碍物为离群点。
19、在一实施例中,所述清扫方法还包括:
20、如果所述目标障碍物为非组合型障碍物,且所述类别信息指示所述目标障碍物为圆形障碍物,确定第一轮廓信息对应的圆心位置和半径;
21、根据所述圆心位置和半径,判断是否存在多个属于同一圆形的第一轮廓信息;如果是,将属于同一圆形的多个第一轮廓信息进行合并,得到修正后轮廓信息;
22、若所述类别信息指示所述目标障碍物为矩形障碍物,将若干形态为直角、线段的第一轮廓信息进行拼接,得到修正后轮廓信息。
23、在一实施例中,如果所述目标障碍物为非组合型障碍物,所述清扫方法还包括:
24、判断所述修正后轮廓信息是否为完整,若否,根据所述类别信息指示的理论轮廓类型,对所述修正后轮廓信息进行补齐,得到经过补齐处理的修正后轮廓信息。
25、在一实施例中,所述方法还包括:
26、对于任一不完整的修正后轮廓信息,判断对所述修正后轮廓信息的补齐处理,是否与周边障碍物的轮廓信息存在冲突;
27、如果存在冲突,放弃对所述修正后轮廓信息的补齐处理。
28、在一实施例中,所述根据所述目标障碍物的修正后轮廓信息,进行路径规划,并以路径规划结果执行清扫工作,包括:
29、在所述机器人的运动方向上存在所述组合型障碍物的情况下,根据机身尺寸和相邻子障碍物之间的第一间距,判断能否从当前运动方向上穿过所述组合型障碍物;其中,相邻子障碍物之间的第一间距,通过相邻子障碍物对应的修正后轮廓信息确定;
30、若能够穿过所述组合型障碍物,生成沿当前运动方向穿过所述组合型障碍物的运动路径,并依据所述运动路径进行运动;其中,在进入所述组合型障碍物的过程中,对所述组合型障碍物的多个子障碍物之间的区域进行清扫;
31、若无法穿过所述组合型障碍物,生成环绕所述组合型障碍物并经过所述组合型障碍物内部的运动路径,并依据所述运动路径进行运动;其中,在进入所述组合型障碍物的过程中,对所述组合型障碍物的多个子障碍物之间的区域进行清扫。
32、在一实施例中,所述根据所述目标障碍物的修正后轮廓信息,进行路径规划,并以路径规划结果执行清扫工作,包括:
33、在所述机器人的运动方向上存在所述组合型障碍物、且所述组合型障碍物内部存在其它障碍物的情况下,根据机身尺寸、相邻子障碍物之间的第一间距、子障碍物与所述其它障碍物之间的第二间距,判断能否从当前运动方向上穿过所述组合型障碍物;其中,相邻子障碍物之间的第一间距,通过相邻子障碍物对应的修正后轮廓信息确定;子障碍物与所述其它障碍物之间的第二间距,通过子障碍物对应的修正后轮廓信息,以及所述其它障碍物的第一轮廓信息确定;
34、若无法穿过所述组合型障碍物,生成环绕所述组合型障碍物、并经过每一对相邻子障碍物与其它障碍物之间区域的运动路径,依据所述运动路径进行运动;其中,在经过每一对相邻子障碍物与其它障碍物之间区域的过程中,执行清扫工作。
35、本申请方案,机器人可以通过激光雷达和摄像头分别采集周边环境的障碍物信息,并对激光雷达采集的障碍物信息与摄像头采集的障碍物信息进行融合,并对障碍物进行修正得到障碍物准确的修正后轮廓信息,以修正后轮廓信息进行路径规划,可以准确避开障碍物。同时,针对由多个子障碍物组成的组合型障碍物,如桌子腿、椅子腿区域,可以根据组合型障碍物的理论组合参数对组合型障碍物的轮廓进行修正,得到更加准确的组合型障碍物轮廓信息,依此规划清扫路径,这样在组合型障碍物区域进行清扫时,可以有效避免漏扫的情况出现,提高清洁效率。
技术特征:1.一种密集障碍物区域的清扫方法,应用于机器人,其特征在于,所述机器人搭载有激光雷达和摄像头,所述清扫方法包括:
2.根据权利要求1所述的密集障碍物区域的清扫方法,其特征在于,所述从所述雷达图像中检测出若干障碍物的第一轮廓信息,包括:
3.根据权利要求1所述的密集障碍物区域的清扫方法,其特征在于,所述从所述摄像头采集的环境图像中,确定若干障碍物的类别信息和第二轮廓信息,包括:
4.根据权利要求1所述的密集障碍物区域的清扫方法,其特征在于,所述根据所述组合型障碍物的理论组合参数,对所述目标障碍物的第一轮廓信息进行修正处理,得到修正后轮廓信息,包括:
5.根据权利要求4所述的密集障碍物区域的清扫方法,其特征在于,所述对各子障碍物之间的距离进行计算,判断离群点,包括:
6.根据权利要求1所述的密集障碍物区域的清扫方法,其特征在于,所述清扫方法还包括:
7.根据权利要求6所述的密集障碍物区域的清扫方法,其特征在于,如果所述目标障碍物为非组合型障碍物,所述清扫方法还包括:
8.根据权利要求7所述的密集障碍物区域的清扫方法,其特征在于,所述方法还包括:
9.根据权利要求1所述的密集障碍物区域的清扫方法,其特征在于,所述根据所述目标障碍物的修正后轮廓信息,进行路径规划,并以路径规划结果执行清扫工作,包括:
10.根据权利要求1所述的密集障碍物区域的清扫方法,其特征在于,所述根据所述目标障碍物的修正后轮廓信息,进行路径规划,并以路径规划结果执行清扫工作,包括:
技术总结本申请提供一种密集障碍物区域的清扫方法,包括:基于激光雷达所采集的雷达数据点构建雷达图像,并从雷达图像中检测出若干障碍物的第一轮廓信息;从摄像头采集的环境图像中,确定若干障碍物的类别信息和第二轮廓信息;将雷达图像中每一障碍物的第一轮廓信息,与环境图像中每一障碍物的第二轮廓信息进行比对,在第一轮廓信息与第二轮廓信息匹配的情况下,将第一轮廓信息对应障碍物与第二轮廓信息对应障碍物关联处理为目标障碍物;根据目标障碍物的类别信息判断目标障碍物为组合型障碍物后,根据理论组合参数,对组合型障碍物的轮廓信息进行修正,并进行路径规划。本申请方案,实现了良好的避障效果和避免漏扫。技术研发人员:朱泽春,李宏峰受保护的技术使用者:尚科宁家(中国)科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240615/63591.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表