一种抓手机构以及钻切一体机的制作方法
- 国知局
- 2024-07-11 15:52:15
本技术涉及板材加工领域,尤其涉及一种抓手机构以及钻切一体机。
背景技术:
1、随着加工自动化技术的发展,特别是在劳动密集型的木材加工领域,自动化的板材加工设备极大的提高了木板的加工效率与加工精度。现有的板材加工设备中,钻切一体机是把钻孔单元和开料单元整合在一台机器上的复合型加工设备,钻切一体机的加工工艺是先在钻孔单元的工作台上进行整板正反面钻孔、拉槽加工,板件再移动到开料单元的工作台面上进行开料加工。由于两个工作单元处于不同的工作台上,板件需要进行两次自动上料和两次装夹固定。目前也有在开料机上先双面钻孔后开料的生产模式,但该生产方式需要在开料机上进行翻转板件的操作,多采用人工进行翻转,自动化程度低、劳动强度大且效率低。现有的钻切一体机,普遍需要分别在两个工作台上对板件进行定位测量,即耽误加工效率,重复定位的精度也较差,两次加工的坐标系容易出现误差。
2、此外,在开料主轴进行板材的开料加工时,需要在真空吸附台面上安装一块具有一定透气性的垫板(通常为中密度纤维板),板件开料的时候会在垫板上过切划出纵横交错的刀路。使用一段时间后刀路密集到一定程度会影响吸附台面的吸附性能,这时需要把垫板降面加工平整。垫板可反复降面加工平整后使用,直至垫板面接近于固定螺栓的高度位置才需要更换新的垫板。然而,降面加工后,板件与吸附台面之间的间隙增大;传统的抓手机构在应对降面加工时,要么跟着调整抓手机构的抓取高度,要么直接松开板件后,从新对板件进行定位再开始加工,过程中极易差生板件的偏移与定位误差。
技术实现思路
1、为了克服现有的抓手机构在板件的钻切一体机加工过程需要多次抓取,重复进行定位,且板件重复定位容易产生偏差的问题,本实用新型提供一种抓手机构以及钻切一体机。
2、本实用新型采用的技术方案是:一种抓手机构,包括上夹手、第一升降组件、下夹手、第二升降组件、升降定位基准、第三升降组件和抓手基座;
3、所述第一升降组件的下端、第二升降组件的下端和第三升降组件的下端均分别与抓手基座固定相连,且所述第一升降组件、第二升降组件和第三升降组件均沿竖直方向设置;
4、所述上夹手和所述下夹手均沿水平方向设置,所述上夹手的一端与所述第一升降组件的上端固定相连,所述下夹手设于所述上夹手的正下方,所述下夹手的一端与所述第二升降组件的上端固定相连;
5、所述升降定位基准设于所述下夹手的一侧,所述升降定位基准的一端与所述第三升降组件的上端固定相连。
6、本实施例还公开了一种钻切一体机,用于加工板件,包括底座,以及固定设于底座上的双面钻铣工段和开料工段,开料工段包括主真空吸附台、副真空吸附台,所述主真空吸附台与所述底座固定相连,所述副真空吸附台与所述底座沿竖直方向滑动相连;
7、所述底座的一侧设有至少一个上述的抓手机构,所述抓手机构与所述底座横向滑动相连,所述抓手机构用于夹紧固定板件并带动板件在双面钻铣工段和开料工段上横向运动,以及通过分别调整上夹手与下夹手的驱动压力,使所夹取的板件在被夹住的过程中贴合不同高度的加工面;所述副真空吸附台用于避让所述抓手机构。
8、作为优选地,所述抓手基座上设有抓手移动组件,所述抓手基座的下侧固定设有若干个第四滑块,所述底座一侧设有与抓手移动组件相配合的齿条,所述齿条的侧面设有与所述第四滑块相配合的第四导轨。
9、优选地,所述底座的前端固定设有自动贴标上料工段,所述底座的后端固定设有自动下料工段。
10、本实用新型的有益效果是:
11、(1)通过上夹手和下夹手均可独立上下运动的抓手设计,可以夹住板件的同时进行上下运动,且可以通过分别调整第一升降组件与第二升降组件的驱动压力,使所夹取的板件在被夹住的过程中贴合不同高度的加工面。
12、(2)通过抓手机构在板件的加工过程中一直固定住板件,直至板件被真空吸附台吸附固定,从而使夹紧板件的抓手机构在加工过程中作为被加工的板件的定位基准,仅需要一次板件定位即可完成双面铣钻工序与开料工序,提高了多道工序加工的准确性,避免重复定位后再加工产生的误差,提高了板材加工的效率。
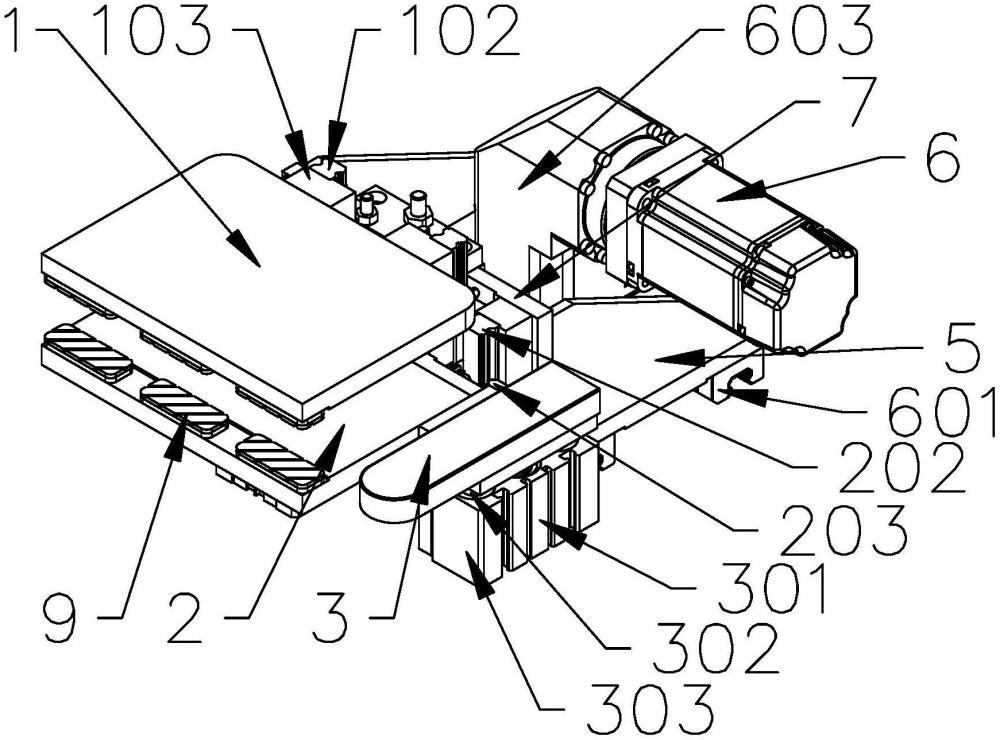
技术特征:1.一种抓手机构,其特征在于,包括上夹手(1)、第一升降组件、下夹手(2)、第二升降组件、升降定位基准(3)、第三升降组件(301)和抓手基座(5);
2.根据权利要求1所述的一种抓手机构,其特征在于,所述抓手基座(5)靠近上夹手(1)的一侧设有竖直的夹手固定板(7),所述夹手固定板(7)与所述抓手基座(5)固定相连,所述夹手固定板(7)上沿竖直方向设有第一滑动导轨(102)和第二滑动导轨(202);
3.根据权利要求2所述的一种抓手机构,其特征在于,所述第一滑动导轨(102)与所述第二滑动导轨(202)各设有两个,且两个所述第一滑动导轨(102)对称设于夹手固定板(7)的两端,两个所述第二滑动导轨(202)对称设于夹手固定板(7)的两端。
4.根据权利要求1所述的一种抓手机构,其特征在于,还包括位置调节板(701)、第一调节机米(702)和第二调节机米(703);位置调节板(701)与所述抓手基座(5)固定相连,所述第一调节机米(702)和所述第二调节机米(703)均分别与所述位置调节板(701)螺纹配合,所述第一调节机米(702)用于限制第一升降组件的运动高度上限,所述第二调节机米(703)用于限制第二升降组件的运动高度上限。
5.根据权利要求1所述的一种抓手机构,其特征在于,所述第一升降组件、所述第二升降组件和所述第三升降组件(301)均是升降气缸。
6.根据权利要求1所述的一种抓手机构,其特征在于,所述上夹手(1)的下表面以及所述下夹手(2)的上表面均设有防滑垫(9)。
7.一种钻切一体机,用于加工板件,其特征在于,包括底座(802),以及固定设于底座(802)上的双面钻铣工段(801)和开料工段,开料工段包括主真空吸附台(803)、副真空吸附台(804),所述主真空吸附台(803)与所述底座(802)固定相连,所述副真空吸附台(804)与所述底座(802)沿竖直方向滑动相连;
8.根据权利要求7所述的一种钻切一体机,其特征在于,所述抓手基座(5)上设有抓手移动组件(6),所述抓手基座(5)的下侧固定设有若干个第四滑块(601),所述底座(802)一侧设有与抓手移动组件(6)相配合的齿条(602),所述齿条(602)的侧面设有与所述第四滑块(601)相配合的第四导轨(604)。
9.根据权利要求7所述的一种钻切一体机,其特征在于,所述底座(802)的前端固定设有自动贴标上料工段(809),所述底座(802)的后端固定设有自动下料工段(810)。
技术总结本技术涉及板材加工领域,具体公开了一种抓手机构以及钻切一体机,抓手机构包括上夹手、第一升降组件、下夹手、第二升降组件、升降定位基准、第三升降组件和抓手基座;第一升降组件、第二升降组件和第三升降组件均沿竖直方向设置;上夹手和下夹手均沿水平方向设置,上夹手与第一升降组件的运动端固定相连,下夹手与第二升降组件的运动端固定相连;升降定位基准设于下夹手的一侧,升降定位基准的后端与第三升降组件的运动端固定相连。本技术通过分别调整上下夹手的驱动压力,使所夹取的板件在被固定的过程中贴合不同高度的加工面,并在不同工序中起到板件在水平方向上定位的基准,确保板件在不同工序中的对齐,减少重复定位,加工效率高。技术研发人员:黄柱文,高子恒,林振涛,唐丰盟受保护的技术使用者:广东德弘重工有限公司技术研发日:20230918技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240615/76425.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
木块规方机的制作方法
下一篇
返回列表