一种变形机器人及变形方法与流程
- 国知局
- 2024-07-11 16:26:46
本发明涉及变形机器人,具体而言,涉及一种变形机器人及变形方法。
背景技术:
1、变形机器人是自动执行工作的机器装置。由于机器人需要在人形态和坦克形态两种形态下自由切换,目前现有技术中并未有相关的技术,并且实现坦克形态和人形态两种形态下的不同姿态的变化需求。
2、例如申请号为kr20220041822的韩国专利,其公开了一种可变形机器人,其中可变形机器人包括臂结构、腿结构和固定在胸腔结构上的机器人头部。臂结构包括左胳膊和右胳膊,腿结构包括左腿和右腿;所述肋骨结构包括固定在所述第二固定框架上部的第一转向器,所述第一转向器的旋转输出轴连续穿过所述第二固定框架的上壁和所述第一垫板以安装在所述第一旋转框架上。固定连接至固定的第一方向盘;第一方向盘具有弧形的有限开口;可移动地穿过第一背板上的受限开口的受限柱;第一转向器的旋转输出轴旋转以旋转第一旋转架。变形机器人通过控制器控制机器人各关节上的转向器,实现从人形到车形或从车形到人形的转换;以汽车的形式,可变形机器人可以通过转向器实现运动;在人类形态下,机器人可以通过舵机实现两足行走。但该机器人的变化姿态较为单一,只能由人形变为车形。
3、又例如公布号为wo2022012051a1的国际申请,其公开了一种变形机器人,包括安装在胸腔结构上的手臂结构、腿部结构及机器人头部。手臂结构包括左手臂和右手臂,腿部结构包括左腿部和右腿部;胸腔结构,包括安装在第二固定架上部的第一舵机,第一舵机的转动输出轴依次穿过第二固定架的顶壁、第一垫板与固定安装在第一转动架上的第一舵盘连接;所述第一舵盘具有圆弧形的限位开口;第一垫板上的限位柱活动地穿过限位开口;第一舵机的转动输出轴转动带动第一转动架转动。该变形机器人可通过控制器控制机器人各个关节上的舵机实现从人形态到车形态的变形或者是从车形态到人形态的变形。在车形态状态下,可通过舵机实现变形机器人运动;在人形态状态下,可通过舵机实现变形机器人进行双足行走。但该机器人的变化姿态较为单一,只能由人形变为车形。
技术实现思路
1、为了解决现有技术存在的上述技术缺陷,本发明的目的在于提供一种变形机器人及变形方法,通过共有13种共计36个舵机用于驱动机器人由人形向坦克形态、坦克向人形态的转变以及各种形态下行走等各种动作。
2、为了实现上述设计目的,本发明采用的方案如下:
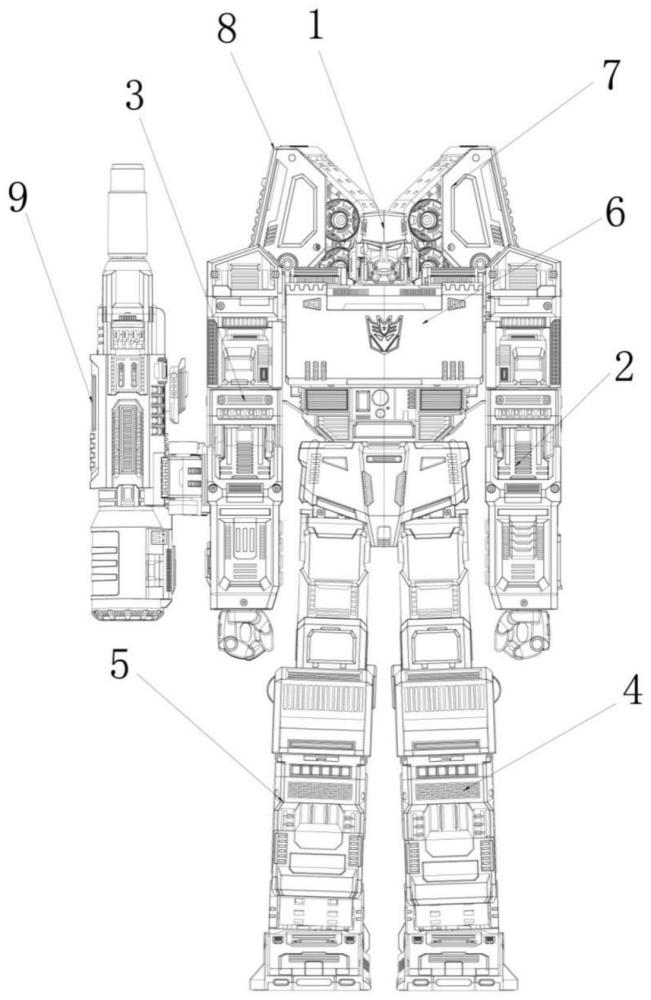
3、本发明的第一方面提供了一种变形机器人,包括头部、躯干以及位于躯干两侧对称分布的左胳膊和右胳膊;位于躯干下端两侧对称分布的左腿和右腿,所述头部、左胳膊、右胳膊、左腿、右腿和躯干通过共有13种共计36个舵机用于驱动机器人由人形向坦克形态、坦克向人形态的转变以及各种形态下行走各种动作;所述人形态和坦克形态包括多种不同的姿态;躯干的前胸上设有logo结构件,该logo结构件具有翻转功能,在变形过程中,logo同时进行翻转,使用户在两种形态下都可以正视logo,使用户有着更好的体验。本发明的机器人在变形前后从坦克形态到人形态的转变以及从人形态到坦克形态下的转变过程,实现了在非人为因素的干扰下可以自动变形,极大地增加了机器人的可玩性与可操作性。
4、优选的是,所述头部包括脖子上壳、脖子下壳以及位于脖子下壳下方的头部舵机,脖子上壳与脖子下壳之间设有从动轮和主动轮,由头部舵机为输出动力源,舵机在人形状态下带动头部左右旋转;由人形态变坦克形态过程中头部向后旋转180°,头部的位置主要利用从动轮与主动轮之间啮合在一起通过齿轮传动实现了舵机输出轴与外观转动位置的不同。
5、在上述任一方案中优选的是,所述躯干包括骨架、前壳、后壳、左壳和右壳,骨架上设有前胸logo翻转连接件、左胳膊舵机、右胳膊舵机、左胳膊翻转舵机、右胳膊翻转舵机、左腿舵机、右腿舵机以及后背的背包连接舵机;前壳、后壳、左壳和右壳紧固在骨架上组成机器人的躯干外观;前胸logo翻转连接件连接前胸主要起到固定的作用;左胳膊舵机和右胳膊舵机分别使左胳膊和右胳膊紧紧连接在机器人的身体上,并带动左胳膊和右胳膊前后旋转到合适的角度;左胳膊翻转舵机、右胳膊翻转舵机分别通过钣金连接件依靠螺钉紧固连接左胳膊舵机和右胳膊舵机,并带动左胳膊舵机和右胳膊舵机进行人形状变坦克形状和坦克形状变人形状时胳膊的翻转以及放下;左腿舵机、右腿舵机分别依靠螺钉将左腿和右腿紧固在机器人身体上,并且实现左腿和右腿的旋转需求;背包连接舵机通过钣金连接件连接左右对称的左背包和右背包,将左背包和右背包紧固在机器人的身体上面,并实现左背包和右背包在坦克形态和人形态的状态下的收起和放下。
6、在上述任一方案中优选的是,所述logo结构件包括logo标、前胸翻板、上壳、前胸滑块固定结构件、左肩上壳、左肩下壳、前胸从动盘和运动机构,左肩上壳和左肩下壳通过螺钉将上舵机固定在外观件的内部,上舵机在驱动外观件左肩上壳和左肩下壳进行运动的时候,从而拉动前胸翻板运动,通过固定在前胸翻板内部的双层拉杆的结构一级拉杆拖动二级拉杆以抽屉的形式使行程最大化,以及齿轮齿条的运动机构;上舵机通过螺钉与前胸主动盘连接左肩下壳和左肩上壳通过螺钉固定将上舵机包在壳内部,前胸从动盘连接在上舵机的从动轴上;前胸主动盘和前胸从动盘均通过螺钉与背包主动盘连接;左肩上壳和左肩下壳通过穿轴的方式与麦克风固定结构件连接,麦克风固定结构件通过螺钉与前胸翻板连接;所述穿轴中穿连有扭簧给前胸翻板提供一个向外的力,担心导轨之间有虚位,靠弹簧让它回正;所述运动机构包括前胸翻板上设有齿条、第一齿轮、第二齿轮、固定滑轨、前胸前滑块、前胸后滑块、胸部滑块、前胸滑块固定结构件和导轨,其中齿条、第一齿轮、第二齿轮的组装件以及logo标、固定滑轨均通过螺钉连接在前胸翻板上,前胸前滑块钩住齿条带给齿条动力。
7、在上述任一方案中优选的是,所述左背包和右背包均包括有背包舵机、背包连接舵机、背包橡胶履带、背包驱动轮、背包张紧轮和背包从动轮,背包橡胶履带利用背包驱动轮的安装位置与背包张紧轮形成35-45度的啮合角度,并与背包从动轮配合完成单个舵机带动背包橡胶履带转动,进而实现机器或单独的负重和机器坦克形态行走的允许。
8、在上述任一方案中优选的是,所述左胳膊包括左小臂、左大臂、手和左肩膀;右胳膊包括右小臂、右大臂、手和右肩膀;左胳膊和右胳膊的大臂中设有大臂舵机和肩膀舵机;左胳膊和右胳膊的小臂中设有小臂舵机;左胳膊和右胳膊的小臂包括小臂钣金件、翻转u型件、翻转舵机、小臂滑轨和小臂手肘,小臂手肘连接在手肘转接轴连接座上,小臂屈肘时能够带动固定在手肘转接轴连接座上的小臂手肘在小臂滑轨里滑动,利用滑块结构使得屈肘的肘部能被小臂手肘所遮挡,完善外观;左胳膊和右胳膊的肩膀处设有肩膀防摩擦件、肩膀舵盘和翻板骨架;左胳膊和右胳膊的大臂和肩膀均通过大臂与肩膀连接件连接在一起;左胳膊和右胳膊的大臂与小臂通过小臂与大臂连接u型件连接;左胳膊和右胳膊的小臂与手通过小臂连接u型件连接,肩膀处利用肩膀防摩擦件与翻板骨架摩擦的方式解决两个外观件直接摩擦的问题,避免了机器人在人形态下运动肩膀与躯干的干涉,以及肩膀与炮的运动干涉;小臂需要完成变形由人形态转变成坦克形态,从而使固定在小臂连接u型件上的翻转舵机的运动下可以将人形态的手和坦克形态下的外观形成180°的翻转,在翻转过程中触碰到两侧的翻板利用扭簧将翻板复位,来完全保证了两种形态下的外观的完整性。
9、在上述任一方案中优选的是,所述左腿与右腿结构相同,现以右腿为例进行介绍,左腿包括左大腿、左膝盖、左小腿和左脚;右腿包括右大腿、右膝盖、右小腿和右脚,右大腿与右小腿通过右膝盖连接,右小腿与右脚通过脚部连接件连接;右大腿的外部设有大腿滑块和大腿滑块盖板,大腿滑块紧固在右大腿和大腿滑块盖板之间,并利用腰部连接件与大腿滑块上凸点的接触为动力推动外观件向下在右大腿和大腿滑块盖板之间滑动,解决外观空间不够和外观完整的问题;右小腿的外部设有小腿顶壳、小腿滑块和脚部翻板,小腿滑块通过小腿顶壳上的滑槽和限位紧固,脚部翻板通过转轴和扭簧紧固在右脚上面,在右脚上围绕转轴转动实现翻转效果,右脚与右小腿处利用小腿滑块与脚部翻板的滑动结构和转动结构之间的配合来实现脚踝处向前翻转90°和外观完整的问题;右小腿的内部设有小腿从动轮、小腿驱动舵机、小腿驱动轮、小腿橡胶履带和小腿张紧轮,小腿橡胶履带利用小腿驱动舵机的安装位置与小腿张紧轮形成35-40度的啮合角度,并与小腿从动轮配合完成单个舵机带动小腿橡胶履带转动,进而实现机器或单独的负重允许,履带硬度60-80,花纹增加摩擦力和6%的收缩率为履带实际长度和打样长度的比值;左腿和右腿的上端设有腰部连接件与机器人的左腿舵机、右腿舵机连接;左腿和右腿从上至下依次设有大腿上舵机、大腿下舵机、腿部连接舵机、小腿上舵机、小腿下舵机和脚部舵机,大腿上舵机带动整条腿的抬起和放下;大腿下舵机和小腿上舵机实现机器人变形增加膝盖的活动范围,避免干涉;腿部连接舵机在人形态变成坦克形态或坦克形态变成人形态将小腿和脚部的部分进行横向的折叠或展开;小腿下舵机通过舵机旋转带动脚部的抬起或者放下;脚部舵机通过舵机旋转将脚部左右旋转,满足机器人在人形态的稳定。
10、要达到90°的翻转角度,直接调好脚的位置是不够的,还要继续调节小腿翻板的位置,因此在弹片机构的基础上又增加了与之配合的滑块机构,滑块机构具体为:小腿外壳通过螺钉紧固在固定不动的驱动位置上面,弹簧放入小腿外壳的弹簧槽里面的同时将小腿翻板通过小腿外壳的滑轨和小腿外壳连接到一起,为了防止其被弹簧弹出,在小腿外壳的螺钉孔处安装螺钉,限制小腿翻板的运动。
11、弹片机构和滑块机构相互配合实现脚踝翻转90°,其小腿和脚在内部的形态分别为小腿翻板通过滑块机构向后收缩和脚翻板通过弹片机构向下压缩;当其从翻转90°再次回到原位时,小腿翻板通过滑块机构沿着导轨弹出,弹出到限制位置上停止弹出,脚部翻板通过弹片机构向上弹出固定的角度。
12、在上述任一方案中优选的是,所述右胳膊上增设有翻转u型件用于连接炮,炮上设有外侧舵机和内侧舵机;左胳膊的肩膀处增设有开关。
13、本发明的另一方面,提供了一种变形机器人的变形方法,包括如下变形步骤:
14、第一步,机器人初始处于站立状态,首先通过左胳膊舵机、大腿上舵机、大腿下舵机、小腿上舵机、小腿下舵机的驱动下机器人由站立状态转变为双手和双足撑地;
15、第二步,在通过肩膀舵机、左胳膊舵机、大腿上舵机、大腿下舵机、小腿上舵机、小腿下舵机的驱动下机器人由双手、双足撑地状态转变为背包和双足撑地;
16、第三步,在通过肩膀舵机、左胳膊舵机、大腿上舵机、大腿下舵机、小腿上舵机、小腿下舵机、前胸舵机(前胸舵机为肩上舵机另一侧没有)、头部舵机(头部舵机为头部转动舵机也只有一个),以上舵机驱动下机器人的头部向后转动180°前胸翻板才能被前胸舵机拉起,此时前胸翻板已经翻到位,logo已经从人形态向坦克形态转变,机器人由背包和双足撑地状态转变为背包和小腿履带撑地;
17、第四步,接下来继续通过肩膀舵机和小腿下舵机的驱动下机器人此时脚部也已经翻转到位贴合在小腿外观件上,依然是由背包与小腿履带撑地;
18、第五步,继续通过左胳膊舵机和背包连接舵机、翻转舵机、内侧舵机(其中内侧舵机全机器也不是对称的只有右小臂连接炮的位置有一颗,来控制炮向内翻转,此时小臂舵机完成了人形态下拳头的造型翻转成为坦克形态的外观造型完成换位)以上舵机的驱动下机器人依然是由背包与小腿履带撑地;
19、第六步,通过左胳膊舵机和背包连接舵机、内侧舵机的驱动下机器人依然是由背包与小腿履带撑地;
20、第七步,通过腿部连接舵机向外90°翻转,腿部连接舵机的驱动下机器人依然是由背包与小腿履带撑地;
21、第八步,继续通过腿部连接舵机向外90°翻转,翻转到为后再由外侧舵机将炮管伸出完成变形。
22、在上述任一方案中优选的是,所述当由坦克形态向人形态转变时将上述步骤由第九步向第一步操作即可。
23、综上所述,本发明的变形机器人及变形方法具有以下优点:通过共有13种共计36个舵机用于驱动机器人由人形向坦克形态、坦克向人形态的转变以及各种形态下行走各种动作;所述人形态和坦克形态包括多种不同的姿态;本发明的机器人变形方法在变形前后从坦克形态到人形态的转变以及从人形态到坦克形态下的转变过程,实现了在非人为因素的干扰下可以自动变形,极大地增加了机器人的可玩性与可操作性;躯干的前胸上设有logo结构件,该logo结构件具有翻转功能,在变形过程中logo在不同形态下logo都可以正视用户,使用户有着更好的体验。
本文地址:https://www.jishuxx.com/zhuanli/20240615/79395.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表