一种用于骨科冲击波治疗的智能机器人系统的制作方法
- 国知局
- 2024-07-11 17:33:37
本发明涉及智能机器人领域,且更具体地涉及一种用于骨科冲击波治疗的智能机器人系统。
背景技术:
1、冲击波是一种介于药物和手术之间的非侵入性治疗方法,安全、有效、操作简便。在骨科冲击波应用常用于治疗股骨头坏死、胫骨、跖骨、股骨等骨折不愈合、延迟愈合,具有良好的效果。
2、冲击波治疗通过使用冲击波的力量,刺激人体的自我修复能力,有助于缓解痛苦和促进康复,在治疗过程中需要医生对仪器输出进行精确位置定位,使治疗能量覆盖病灶范围,此步至关重要,很少有医生能在没有参照对比下手动解决,很难保证治疗时的精度,进而影响治疗的效果。
3、因此,本发明公开了一种用于骨科冲击波治疗的智能机器人系统,通过导航设备将患者股骨的外形图像与内部三维模型建立关联,并通过预设治疗模型确定运动机器人的运功轨迹和冲击波的强度,提高治疗的准确性,同时通过物联网平台将患者治疗前或治疗中的影像进行实时展示和共享,让操作人员随时知道治疗的位置同病患解剖结构的关系,同时又得到导航帮助,提高治疗服务的质量和效率。
技术实现思路
1、针对现有技术的不足,本发明公开了一种用于骨科冲击波治疗的智能机器人系统,采用位置传感器实时反馈冲击波探头的位置信息,运动机器人通过冲击波探头将冲击波传导至患者股骨的患处,通过ct、mri扫描仪和三维相机采集患者股骨信息,通过图像比对模型建立患者股骨的外形图像与内部三维模型的关联,通过预设治疗模型确定运动机器人的运功轨迹和冲击波的强度,提高治疗的准确性;通过电极产生高压电场,并根据电场的电击效应产生冲击波,采用聚焦传导的方式将产生的冲击波在传导器内部进行聚焦,并通过冲击波探头将聚焦后的冲击波直接传导至患者股骨的患处,通过固定平台实现智能机器人系统整体承载,采用万向轮实现智能机器人多方向移动,通过液压装置实现固定平台的上升或下降,通过控制运动机器人的电机实现对运动机器人运动的控制,通过物联网平台将患者治疗前或治疗中的影像进行实时展示和共享,提高治疗服务的质量和效率。
2、本发明采用以下技术方案:
3、一种用于骨科冲击波治疗的智能机器人系统,所述系统包括:
4、运动机器人,用于实现对冲击波探头的精准定位和实施冲击波治疗,所述运动机器人采用位置传感器实时反馈冲击波探头的位置信息,所述运动机器人通过冲击波探头将冲击波传导至患者股骨的患处;
5、导航设备,用于实现对患者股骨内部和外部运动的实时观测,自动调整冲击波的位置和强度,所述导航设备包括视觉模块、数据存储模块和治疗规划模块,所述视觉模块通过ct(计算机断层扫描)扫描仪、mri(核磁共振成像)扫描仪和三维相机采集患者股骨信息,所述视觉模块通过图像比对模型建立患者股骨的外形图像与内部三维模型的关联,所述数据存储模块通过存储器实现患者股骨的外形图像与内部三维模型数据的存储,所述治疗规划模块通过预设治疗模型确定运动机器人的运功轨迹和冲击波的强度;
6、冲击波治疗设备,用于生产治疗使用的冲击波,所述冲击波治疗设备包括治疗设备平台、冲击波发生器和冲击波传导器,所述冲击波发生器的输出端与所述冲击波传导器的输入端连接,所述冲击波发生器和冲击波传导器安置在所述治疗设备平台中;
7、固定平台,用于智能机器人系统整体承载,所述固定平台包括底盘、轮胎和升降型平台,所述轮胎安置在所述底盘的下端四角,所述升降型平台安置在所述底盘的上端;
8、驱动模块,用于控制运动机器人的运动,所述驱动模块包括驱动接口和执行器,所述驱动接口的输出端与所述执行器的输入端连接;
9、共享展示平台,用于共享和远程展示治疗前或治疗中的影像,所述共享展示平台通过物联网平台将患者治疗前或治疗中的影像进行实时展示和共享;
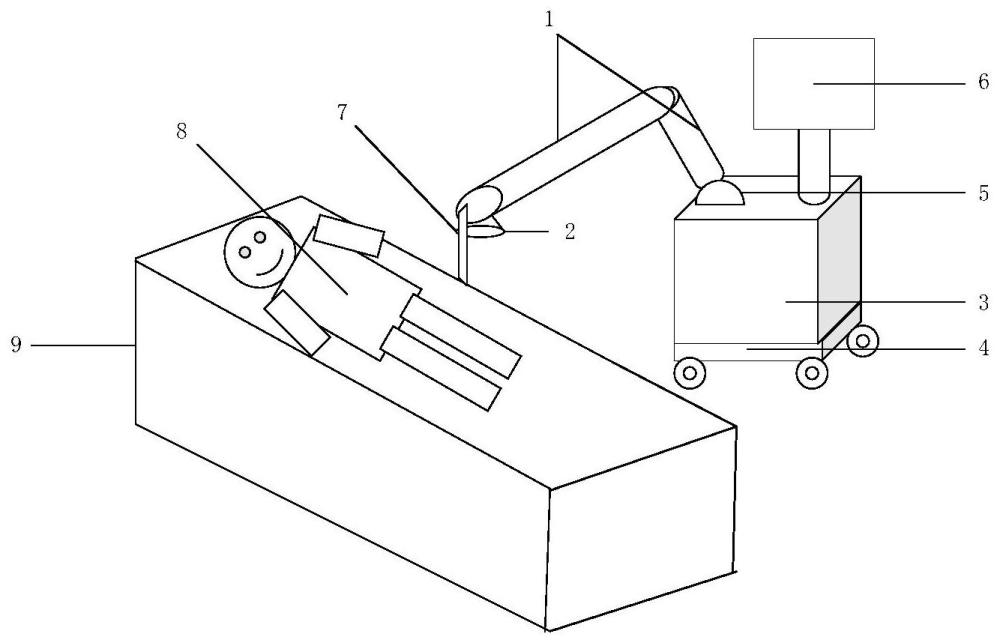
10、所述冲击波治疗设备设置在所述固定平台的上端,所述运动机器人设置在所述冲击波治疗设备的上端,所述驱动模块设置在所述运动机器人的下端,所述导航设备设置在所述运动机器人的上端,所述共享展示平台设置在所述冲击波治疗设备的上端右侧。
11、作为本发明进一步的技术方案,所述图像比对模型的构建包括以下步骤:
12、步骤一、获取患者股骨的ct或mri二维图像;
13、所述图像比对模型采用ct或mri扫描仪对患者股骨进行扫描,并根据患者的具体情况和病症选择合适的扫描参数,获取患者股骨的ct或mri二维图像,所述扫描参数包括扫描区域、扫描层数和扫描方式;
14、步骤二、构建患者股骨的内部三维模型;
15、所述图像比对模型通过图像处理函数对患者股骨图像数据进行预处理,并采用滤波反投影算法进行三维重建,建立出包含患者股骨的内部三维模型,所述滤波反投影算法通过滤波处理和反投影计算将ct或mri二维图像转换为三维模型,所述滤波反投影算法通过引入正则化项,实现平衡图像平滑和噪声印制,所述滤波反投影算法的公式为:
16、f(x)=∫[∫∫f(x,y)δ(xcosθ+ysinθ-r)dxdy]·tdt+λ||w||_1 (1)
17、在公式(1)中,f(x,y)是ct或mri二维图像的灰度值,δ(x)为dirac拉普拉斯分布函数,(x,y)为投影点的坐标,θ为投影角度,r为投影的距离,t为扫描时间,λ为正则化参数,w为模型参数,||·||_1为l1范数;
18、步骤三、获取患者股骨的三维图像;
19、所述图像比对模型通过三维相机对患者的股骨进行拍摄,将实际的人体股骨外形转换为三维图像;
20、步骤四、进行比对和拼接;
21、所述图像比对模型通过图像识别算法将三维图像与内部三维模型进行比对和拼接,完成外形图像与内部三维模型的相关联,所述图像识别算法的公式为:
22、w=γ*∑αi·||si-r*ti-l||2 (2)
23、在公式(2)中,w为内部三维模型的点集和外形三维图像的点集的距离,γ为迭代补偿系数,αi为点si和ti的权重,si为内部三维模型点集的第i个元素,ti为外形三维图像点集的第i个元素,r为旋转矩阵,l为平移向量,当w值小时,则内部三维模型和外形三维图像匹配,若匹配正确,则执行下一步骤,若匹配错误,则重复此步骤;
24、步骤五、重构内部三维模型;
25、所述图像比对模型通过旋转矩阵和平移向量将原内部三维模型的点集进行变换,获得新的点集,并使用新点集重新构建成三维模型,实现股骨与内部三维模型的相关联。
26、作为本发明进一步的技术方案,所述预设治疗模型的构建包括以下步骤:
27、步骤1、获取预设目标点的位置信息;
28、所述预设治疗模型根据治疗方案输入预设目标点和冲击波强度参数,所述预设治疗模型通过图像识别算法确定输入的预设目标点的位置信息,确定所述运动机器人到达的位置;
29、步骤2、确定运动机器人的运动轨迹;
30、所述预设治疗模型根据预设目标点之间的距离和方向,确定运动轨迹的控制点,所述预设治疗模型基于贝塞尔曲线和控制点构建运动轨迹公式,规划出运动轨迹,并通过增加惩罚项避免贝塞尔曲线过度拟合,所述运动轨迹公式为:
31、
32、在公式(3)中,b(z)为运动轨迹上的点z,n为控制点的个数,k为控制点的排序,pk为第k个控制点,μ为惩罚项系数,β为惩罚项;
33、步骤3、确定所述运动机器人的运动时间和速度;
34、所述预设治疗模型通过计算运动轨迹点之间的距离,计算出所述运动机器人运动的时间和速度,实现运动轨迹的平滑和连续性;
35、步骤4、治疗轨迹预判;
36、所述预设治疗模型通过输出端口将规划完成的治疗轨迹传输至共享展示平台,操作者对治疗轨迹进行预判,若预判正确,则执行治疗轨迹,若预判错误,则预设治疗模块重新规划治疗轨迹。
37、作为本发明进一步的技术方案,所述治疗设备平台采用金属框架形成存放空间,实现冲击波治疗仪器的安置存放,所述冲击波发生器通过电极产生高压电场,并根据电场的电击效应产生冲击波,所述冲击波传导器采用聚焦传导的方式将产生的冲击波在传导器内部进行聚焦,并通过冲击波探头将聚焦后的冲击波直接传导至患者股骨的患处。
38、作为本发明进一步的技术方案,所述底盘通过金属材料剪裁形成平面,实现升降型平台的放置,所述轮胎采用万向轮实现智能机器人多方向移动,所述升降型平台通过液压装置实现固定平台的上升或下降。
39、作为本发明进一步的技术方案,所述驱动接口通过无线传输协议接收来自导航设备的运动轨迹,所述执行器通过控制所述运动机器人的电机实现对所述运动机器人运动的控制。
40、作为本发明进一步的技术方案,所述物联网平台包括数据连接模块、数据预处理模块、数据展示模块和数据共享模块,所述数据连接模块通过文件传输协议将物联网平台与导航设备的数据存储模块建立联系,并获取患者股骨治疗前或治疗中的影像数据,所述数据预处理模块通过小波变换法和去噪算法实现对患者股骨治疗前或治疗中影像数据的增强和去除噪声,所述数据展示模块通过可视化算法和图形渲染方法将患者股骨的治疗前或治疗中的影像数据转化为可视化影像实现实时展示,所述数据共享模块通过互联网通信服务将患者股骨治疗前或治疗中的影像数据传输至其他终端设备上实现远程共享和访问。
41、积极有益效果:
42、本发明公开了一种用于骨科冲击波治疗的智能机器人系统,采用位置传感器实时反馈冲击波探头的位置信息,运动机器人通过冲击波探头将冲击波传导至患者股骨的患处,通过ct、mri扫描仪和三维相机采集患者股骨信息,通过图像比对模型建立患者股骨的外形图像与内部三维模型的关联,通过预设治疗模型确定运动机器人的运功轨迹和冲击波的强度,提高治疗的准确性;通过电极产生高压电场,并根据电场的电击效应产生冲击波,采用聚焦传导的方式将产生的冲击波在传导器内部进行聚焦,并通过冲击波探头将聚焦后的冲击波直接传导至患者股骨的患处,通过固定平台实现智能机器人系统整体承载,采用万向轮实现智能机器人多方向移动,通过液压装置实现固定平台的上升或下降,通过控制运动机器人的电机实现对运动机器人运动的控制,通过物联网平台将患者治疗前或治疗中的影像进行实时展示和共享,提高治疗服务的质量和效率。
本文地址:https://www.jishuxx.com/zhuanli/20240615/84902.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表