腹部穴位确定方法、装置、艾灸机器人及存储介质
- 国知局
- 2024-07-11 17:41:33
本发明穴位识别,具体涉及一种腹部穴位确定方法、装置、艾灸机器人及存储介质。
背景技术:
1、随着人们对身体健康的愈加重视,越来越多的人开始选择艾灸作为对身体不适的治疗手法。艾灸在中医传统医术中流传至今,已衍生出了多种针灸手法,其中,腹针疗法就是在人的腹部上相应的穴位进行实施针刺的过程,在肚子上治疗各种疾病的过程。
2、当前主流腹部穴位定位方法是通过训练深度学习模型来实现检测,但此方法对于没有什么纹理特征的腹部来说,特征不能得到很好的学习,导致腹部穴位定位不准确,进而影响艾灸治疗。为实现准确的腹部定位,最常用的还是人工寻穴,即:通过人工经验确定腹部穴位并进行艾灸,但人工寻穴效率低,且依赖于人工经验,当经验不足时,腹部穴位定位也不准确。
3、因此,亟需提供一种腹部穴位确定方法、装置、艾灸机器人及存储介质,提高确定出的腹部穴位的准确率。
技术实现思路
1、有鉴于此,有必要提供一种腹部穴位确定方法、装置、艾灸机器人及存储介质,用以解决现有技术中存在的确定出的腹部穴位的准确率较低的技术问题。
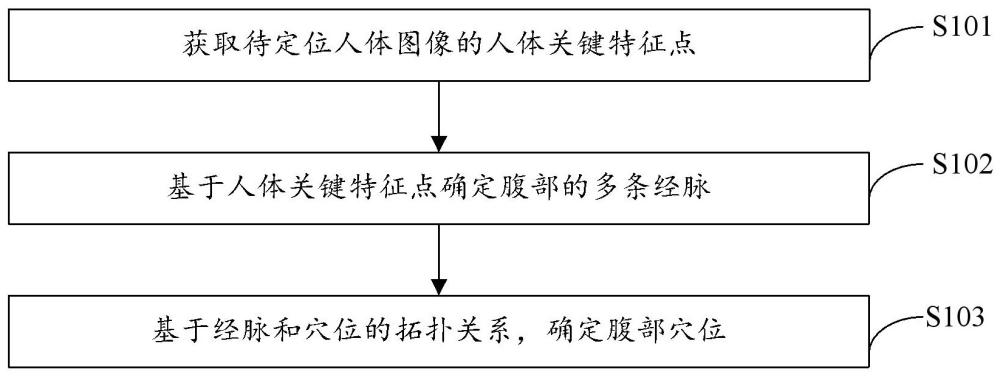
2、一方面,本发明提供了一种腹部穴位确定方法,包括:
3、获取待定位人体图像的人体关键特征点;
4、基于所述人体关键特征点确定腹部的多条经脉;
5、基于所述经脉和穴位的拓扑关系,确定腹部穴位。
6、在一些可能的实现方式中,所述人体关键特征点包括第一类人体关键特征点和第二类人体关键特征点,所述获取待定位人体图像的人体关键特征点,包括:
7、基于mediapipe提取模型对所述待定位人体图像进行关键点提取,确定所述第一类人体关键特征点;
8、对初始检测模型进行训练,获得目标检测模型,并基于所述目标检测模型对所述待定位人体图像进行关键点提取,确定所述第二类人体关键特征点。
9、在一些可能的实现方式中,所述第一类人体关键特征点包括鼻子,所述第二类人体关键特征点包括左乳头、右乳头以及肚脐;所述经脉包括任脉、左足少阴肾经、右足少阴肾经、左足阳明胃经、右足阳明胃经、左足太阴脾经和右足太阴脾经。
10、在一些可能的实现方式中,所述基于所述人体关键特征点确定腹部的多条经脉,包括:
11、确定所述鼻子和所述肚脐的第一连线,并将所述第一连线作为所述任脉;
12、过左乳头和右乳头分别做与所述第一连线平行的第一平行线和第二平行线,并将所述第一平行线作为所述左足太阴脾经,将所述第二平行线作为右足太阴脾经;
13、确定与所述第一连线平行,且与所述第一连线和所述第一平行线之间的距离相等的第三平行线,并将所述第三平行线作为所述左足阳明胃经;
14、确定与所述第一连线平行,且与所述第一连线和所述第二平行线之间的距离相等的第四平行线,并将所述第四平行线作为所述右足阳明胃经;
15、确定与所述第一连线之间的距离为预设距离的第五平行线和第六平行线,所述第五平行线位于所述第一连线和所述第三平行线之间,所述第六平行线位于所述第一连线和所述第四平行线之间,并将所述第五平行线作为所述左足少阴肾经,将所述第六平行线作为所述右足少阴肾经。
16、在一些可能的实现方式中,所述拓扑关系包括所述经脉与所述穴位之间位置关系、所述经脉与所述经脉之间的横向拓扑关系以及所述穴位和穴位之间的竖向拓扑关系;所述基于所述经脉和穴位的拓扑关系,确定腹部穴位,包括:
17、获取所述左乳头和所述右乳头之间的第一实际像素距离和第一市制距离,并基于所述第一实际像素距离和所述第一市制距离确定单位横寸;
18、获取所述肚脐的中心点与所述左乳头和所述右乳头的中点之间的第二实际像素距离和第二市制距离,并基于所述第二实际像素距离和所述第二市制距离确定单位竖寸;
19、获取所述位置关系;
20、基于所述单位横寸确定所述横向拓扑关系,并基于所述单位竖寸确定所述竖向拓扑关系;
21、基于所述位置关系、所述横向拓扑关系和所述纵向拓扑关系确定所述腹部穴位。
22、在一些可能的实现方式中,所述腹部穴位包括神阙、下脘、中脘、上脘、气海、关元、中极、左承满、左梁门、左太乙、左天枢、左水道、左归来、右承满、右梁门、右太乙、右天枢、右水道、右归来、左大横、左腹结、右大横、右腹结、左腹通骨、左阴都、左商曲、左肓俞、左气穴、左大赫、右腹通骨、右阴都、右商曲、右肓俞、右气穴、右大赫;
23、所述位置关系为:所述神阙、下脘、中脘、上脘、气海、关元、中极位于所述任脉上,所述左承满、左梁门、左太乙、左天枢、左水道、左归来位于所述左足阳明胃经上,所述右承满、右梁门、右太乙、右天枢、右水道、右归来位于所述右足阳明胃经上,所述左大横、左腹结位于所述左足太阴脾经上,所述右大横、右腹结位于所述右足阳明胃经上,所述左腹通骨、左阴都、左商曲、左肓俞、左气穴、左大赫位于所述左足少阴肾经上,所述右腹通骨、右阴都、右商曲、右肓俞、右气穴、右大赫位于所述右足少阴肾经上;
24、所述横向拓扑关系为:所述任脉与所述左足阳明胃经、所述右足阳明胃经之间的距离均为2个单位横寸,所述任脉与所述左足太阴脾经、右足太阴脾经之间的距离均为4个单位横寸,所述任脉与所述左足少阴肾经、所述右足少阴肾经均为0.5个单位横寸;
25、所述竖向拓扑关系为:所述下脘、中脘、上脘位于所述神阙与所述鼻子之间,所述下脘与所述神阙之间的距离为2个单位竖寸,所述中脘与所述神阙之间的距离为4个单位竖寸、所述上脘与所述神阙之间的距离为5个单位竖寸,所述气海、关元、中极位于所述神阙与脚之间,所述气海与所述神阙之间的距离为1.5个单位竖寸,所述关元与所述神阙之间的距离为3个单位竖寸、所述中极与所述神阙之间的距离为4个单位竖寸;所述左承满、所述右承满与所述上脘的纵坐标相同,所述左梁门、所述右梁门、所述左阴都、所述右阴都与所述中脘的纵坐标相同,所述左太乙、所述右太乙、所述左商曲、所述右商曲与所述下脘的纵坐标相同,所述左天枢、所述右天枢、所述大横、所述右大横、所述左肓俞、所述右肓俞与所述神阙的纵坐标相同,所述左腹结、所述右腹结与所述气海的纵坐标相同,所述左水道、所述右水道、所述左气穴、所述右气穴与所述关元的纵坐标相同,所述左归来、所述右归来、所述左大赫、所述右大赫与所述中极的纵坐标相同。
26、在一些可能的实现方式中,所述第一类人体关键特征点还包括左肩膀和右肩膀;则在所述基于所述经脉和穴位的拓扑关系,确定腹部穴位之前,还包括:
27、获取所述左肩膀和所述右肩膀之间的连接线,并确定所述连接点的连接中点;
28、过所述连接中点做垂直于所述连接线的垂直线;
29、判断所述垂直线与所述任脉之间的角度偏差值是否小于偏差阈值,若小于,则所述任脉准确。
30、另一方面,本发明还提供了一种腹部穴位确定装置,包括:
31、关键特征点获取单元,用于获取待定位人体图像的人体关键特征点;
32、经脉确定单元,用于基于所述人体关键特征点确定腹部的多条经脉;
33、腹部穴位确定单元,用于基于所述经脉和穴位的拓扑关系,确定腹部穴位。
34、另一方面,本发明还提供了一种艾灸机器人,包括用于确定腹部穴位的寻穴子系统和用于基于所述腹部穴位进行艾灸的施灸子系统,所述寻穴子系统包括存储器和处理器,其中,
35、所述存储器,用于存储程序;
36、所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述任意一种可能的实现方式中的腹部穴位确定方法中的步骤。
37、另一方面,本发明还提供了一种计算机可读存储介质,所述可读存储介质上存储有程序或指令,所述程序或指令被处理器执行时以实现上述任意一种可能的实现方式中所述的腹部穴位确定方法中的步骤。
38、采用上述实施例的有益效果是:本发明提供的腹部穴位确定方法,通过设置基于人体关键特征点确定腹部的多条经脉,然后基于经脉和穴位的拓扑关系,确定腹部穴位,实现通过经脉确定腹部穴位,避免了基于深度学习模型对穴位进行定位,导致其对没纹理特征的腹部穴位定位不准确的技术问题,提高了腹部穴位的定位准确性。
39、进一步地,本发明无需对穴位进行标注,消除了标注过程,因此,可避免标注不准确带来的定位不准确的问题,进一步提高了腹部穴位的定位准确性,并提高了腹部穴位的定位效率。
本文地址:https://www.jishuxx.com/zhuanli/20240615/85617.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表