一种机器人钢卷喷码系统的制作方法
- 国知局
- 2024-07-05 16:08:06
本技术专利属于工业机器人应用,具体涉及一种用于机器人全自动、自适应的钢卷喷码的系统。
背景技术:
1、目前在冶金工厂轧钢车间,在成品钢卷入库前,需要对其进行喷码,用来标识钢卷的信息,用来入库记录和质量追溯。钢卷信息一般包括日期、炉号、班组、规格、钢制等。喷码工作普遍由人工完成,工人手持喷枪,在距离钢卷很近的地方喷码,这种形式存在劳动效率低,喷码效果差、错码率高,且劳动繁重、油漆对工人健康伤害很大。一种机器人钢卷喷码系统的应用解决了上述问题,本系统使用6轴工业机器人携带自动喷枪的形式代替工人来完成工作。
技术实现思路
1、由于目前使用的人工喷码存在错误率高、对工人健康伤害大的缺点,本实用新型提供一种机器人钢卷喷码系统,以实现机器人喷码效率高、喷码质量高、喷码正确率高、运行可靠性高,并且保护工人身体健康的目的。
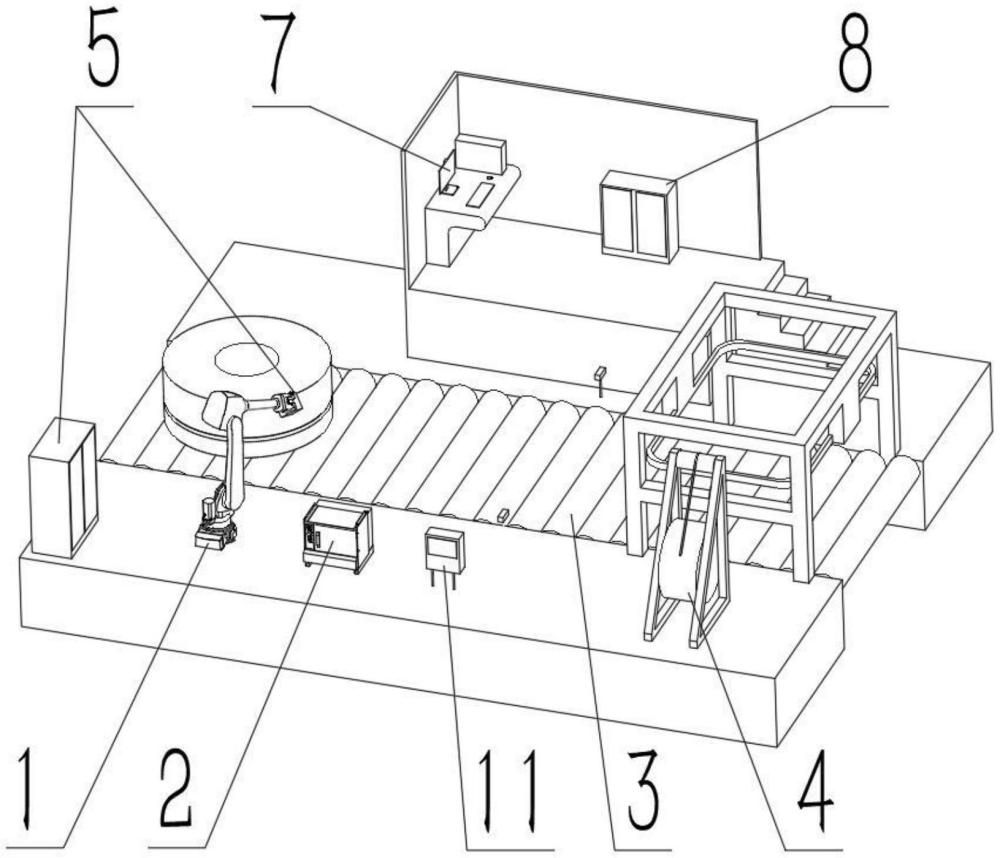
2、为实现上述目的,本实用新型所采取的技术方案是:一种机器人钢卷喷码系统,其特征在于:本系统包括机器人、机器人控制柜、喷涂单元、径向激光测距仪、就地操作箱、主控系统以及plc。所述机器人为本系统的主要执行机构,由机器人控制柜发出的信号驱动;所述机器人控制柜为机器人的控制系统,用于将plc发出的信号传递给机器人;所述喷涂单元包括喷涂盒和喷涂柜,所述喷涂盒为本系统的喷码机构,安装在机器人的腕部法兰,作为机器人喷码作业的工具;所述喷涂柜为涂料的存储和输出机构,可控制涂料输出的压力、流量等参数;所述径向激光测距仪安装在钢卷运输路径的两侧,用于测量钢卷直径,并将测量信号发送给plc;所述就地操作箱用于操作人员在工作现场操作本系统;所述主控系统为人工操作的控制系统;所述plc为本系统自动运行的控制系统,同时作为本系统的信息集成和控制中心,通过内置程序对各设备进行统一调配。
3、进一步的,所述喷涂盒包括:探针、喷头以及定位激光测距仪。所述探针的主体部分安装在喷涂盒内,探测部分伸出喷涂盒,用于测量钢卷的厚度以及钢卷停止在辊道上喷涂位的具体位置,并将测量信号发送给plc;所述喷头安装在喷涂盒内,用于喷出涂料;所述定位激光测距仪安装在喷涂盒内,用于测量钢卷的厚度以及钢卷停止在辊道上喷涂位的具体位置,并将测量信号发送给plc。
4、进一步的,所述探针与定位激光测距仪互为备份冗余测量系统。
5、进一步的,所述主控系统包括:上位机控制系统以及通讯系统。所述上位机控制系统用于操作人员手动向本系统发出指令,可输入要喷涂的字符信息,并控制本系统的运行;所述通讯系统用于接入钢厂的生产控制系统,获取所需的喷码字符信息,无需操作人员在上位机控制系统的界面上手动输入。两种获取喷码字符信息的方式在实际生产中选择一种即可。
6、进一步的,本系统可收集的喷码信息包括:日期班组、钢制、炉号、规格,并在所述上位机控制系统的操作界面生成汇总表格。
7、进一步的,本系统各组成部分之间的信号交互和指令传递通过连接彼此的信号线缆传输。
8、进一步的,本系统的运行模式包括:全自动运行模式和半自动运行模式。所述半自动运行模式作为全自动运行模式的冗余替补,当本系统无法全自动运行或必须人工介入时,操作人员可通过就地操作箱或主控系统手动向本系统发送指令。
9、进一步的,本系统可实现的钢卷喷码位置包括:端面、圆周面。
10、本实用新型的有益效果为:可以实现工业机器人钢卷喷码的全自动运行,根据钢卷位置和钢卷直径机器人自适应调整喷码位置,无需人为干预,大大降低操作人员工作强度,使轧钢生产线的恶劣环境下人力投入减少,保护操作人员身体健康,缓解钢厂人员短缺的压力。
技术特征:1.一种机器人钢卷喷码系统,其特征是:本系统包括机器人(1)、机器人控制柜(2)、喷涂单元(5)、径向激光测距仪(6)、主控系统(7)、plc(8)以及就地操作箱(11);所述机器人(1)通过信号线缆与机器人控制柜(2)连接;所述机器人控制柜(2)通过信号线缆与plc(8)连接;所述喷涂单元(5)通过信号线缆与plc(8)连接;所述径向激光测距仪(6)通过信号线缆与plc(8)连接;所述主控系统(7)通过信号线缆与plc(8)连接;所述就地操作箱(11)通过信号线缆与plc(8)连接。
2.根据权利要求1所述的一种机器人钢卷喷码系统,其特征是:所述喷涂单元(5)包括喷涂盒(501)以及喷涂柜(502);所述喷涂盒(501)安装在机器人(1)上。
3.根据权利要求2所述的一种机器人钢卷喷码系统,其特征是:所述喷涂盒(501)包括探针(5011)、喷头(5012)以及定位激光测距仪(5013);所述探针(5011)的主体部分安装在喷涂盒(501)内,探测部分伸出喷涂盒(501),探针(5011)通过信号线缆与plc(8)连接;所述喷头(5012)安装在喷涂盒(501)内,通过信号线缆与plc(8)连接;所述定位激光测距仪(5013)安装在喷涂盒(501)内,通过信号线缆与plc(8)连接。
4.根据权利要求3所述的一种机器人钢卷喷码系统,其特征是:所述探针(5011)与定位激光测距仪(5013)功能相同,互为备份冗余测量系统。
5.根据权利要求1所述的一种机器人钢卷喷码系统,其特征是:本系统进行喷码作业的部位包括:钢卷(9)的端面、圆周面。
技术总结本技术涉及一种机器人钢卷喷码系统,属于工业机器人应用技术领域,包括机器人、机器人控制柜、喷涂单元、径向激光测距仪、就地操作箱、主控系统以及PLC。所述机器人为本系统的主要执行机构;所述机器人控制柜为机器人的控制系统;所述喷涂单元包括喷涂盒和喷涂柜,所述喷涂盒安装在机器人的腕部,为喷码机构,所述喷涂柜为涂料的存储和输出机构;所述径向激光测距仪安装在钢卷运输路径的两侧,用于测量钢卷直径;所述就地操作箱用于操作人员在工作现场操作本系统;所述主控系统为人工操作的控制系统;所述PLC为本系统自动运行的控制系统。本系统具有喷码效率高、质量高、正确率高、运行可靠性高的特点,能够保护操作人员健康、减轻负担。技术研发人员:蔡成闻,潘华,王天一,张玲玲,泮鹏程,刘洋受保护的技术使用者:山东省冶金设计院股份有限公司技术研发日:20230818技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/40667.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表