一种近远程协同消防作战的机器人的制作方法
- 国知局
- 2024-07-05 16:55:23
本发明涉及消防机器人,具体的,涉及一种近远程协同消防作战的机器人。
背景技术:
1、随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。
2、经检索,申请号为202221100869.x一种消防机器人系统及消防机器人,其中,该消防机器人系统包括:控制模块、传感器模块以及执行模块,其中,传感器模块分别与执行模块以及控制模块连接,用于获取执行模块当前的工况信息,并将工况信息传输至控制模块;控制模块,用于接收工况信息,并根据工况信息生成控制指令;执行模块与控制模块连接,用于接收并执行控制模块发送的控制指令。通过本技术,解决了消防机器人无法确定各执行机构是否准确地执行控制指令的问题,提高了消防机器人运行控制准确度。
3、上述消防机器人具有能够感知各执行模块的工况信息的消防机器人系统,能够获知消防机器人中各执行模块的工况信息的反馈,并根据反馈的工况信息实现对消防机器人的闭环控制,而在实际工况的复杂环境下,可能会存在以下问题:仅能够适用于近程消防作战,而在当消防距离较远时,就需要更换长度较长的消防水带,这样就会增加机器人的负担,在行驶路线上会出现一些路障,进而影响机器人的行驶路线,。
技术实现思路
1、本发明提出一种近远程协同消防作战的机器人,解决了现有技术中远距离作战需更换消防水带、路障影响机器人行驶路线的问题。
2、本发明的技术方案如下:一种近远程协同消防作战的机器人,包括消防机器人、无人机以及控制中心,所述消防机器人包括通讯单元、执行单元以及中央控制模块,所述中央控制模块通过通讯单元与控制中心通讯连接,所述中央控制模块与执行单元信号连接,用于传达操控指令,所述消防机器人与控制中心建立连接后能够进行引航式灭火模式与自适应灭火模式,所述消防机器人的引航式灭火模式与自适应灭火模式均包括近程消防作战程序与远程消防作战程序。
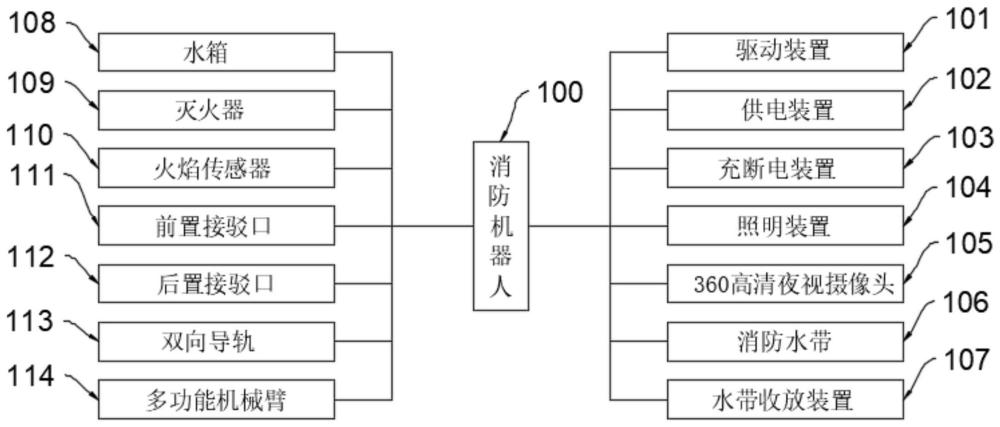
3、优选的,所述消防机器人上配置有驱使消防机器人进退及转向的驱动装置、为消防机器人进行供电的供电装置、与基站充电桩连接为供电装置进行充电的充断电装置、为消防机器人在工作环境中提供光亮的照明装置、对消防机器人工作环境进行拍摄的360高清夜视摄像头、与消防栓连接的消防水带、对消防水带进行收放的水带收放装置、用于储备水源的水箱、对火源进行灭火的灭火器、自适应感知火源位置的火焰传感器、将消防水带与水箱接驳的前置接驳口、可与其他消防机器人上前置接驳口接驳的后置接驳口、双向导轨、在双向导轨上行走调整使用位置实现消防栓接驳与清理路障的多功能机械臂。
4、优选的,所述通讯单元包括无线发射模块与无线接收模块,所述无线发射模块与无线接收模块和控制中心建立联系后,由控制中心对消防机器人进行远程人为操控。
5、优选的,所述执行单元包括:
6、行走驱动模块,用于控制驱动装置驱使消防机器人前进、后退、左转、右转及停止;
7、摄像头控制模块,用于控制360高清夜视摄像头上下摆动、左右摇晃调整摄像姿态;
8、机械手驱动模块,用于控制多功能机械臂在双向导轨前后行走至工作位置,实现消防水带与消防栓、不同消防机器人后置接驳口与消防水带的对接与脱开以及对消防机器人行驶路线上障碍物的搬运;
9、充断电控制模块,用于控制充断电装置将消防机器人上的供电装置的充电头与基站充电桩连接或断开
10、水带收放控制模块,用于控制水带收放装置将消防水带进行释放与收卷。
11、优选的,所述消防机器人的引航式灭火模式包括以下步骤:
12、第一步,接警后控制中心控制无人机与消防机器人出动,由无人机对消防机器人进行引航;
13、第二步,由无人机发现火点,并根据火点位置为消防机器人规划好行径路线;
14、第二步,消防机器人的火焰传感器感知到火点位置,并将信息反馈至控制中心,由控制中心下发指令远程操控消防机器人进行灭火。
15、优选的,所述消防机器人的自适应灭火模式包括以下步骤:
16、第一步,接警后控制中心控制消防机器人出动,由消防机器人上自带的360高清夜视摄像头进行自适应巡航;
17、第二步,由360高清夜视摄像头观察火点位置,并通过控制中心操控消防机器人行驶至火点附近;
18、第三步,到达火点附近后,由消防机器人的火焰传感器感知火点位置信息,并将信息反馈至控制中心,由控制中心下发指令远程操控消防机器人进行灭火。
19、所述消防机器人的近程消防作战程序包括以下步骤:
20、第一步,消防机器人通过多功能机械臂与火点位置附近的消防栓进行对接;
21、第二步,消防机器人在驱动装置的驱使下驶向火点位置,并在行驶过程中通过水带收放装置逐渐将消防水带释放;
22、第三步,在到达火点位置后,驱动装置与水带收放装置同步停止,并由灭火器执行灭火。
23、优选的,所述消防机器人的远程消防作战程序包括以下步骤:
24、第一步,消防机器人通过多功能机械臂与火点位置附近的消防栓进行对接;
25、第二步,消防机器人在驱动装置的驱使下驶向火点位置,并在行驶过程中通过水带收放装置逐渐将消防水带释放;
26、第三步,在到达火点位置后,驱动装置与水带收放装置同步停止,并由灭火器执行灭火,并在灭火过程中将消防机器人自带的水箱充满;
27、第四步,在灭火完成后,下一消防火点超过作战区域时,多功能机械臂断开消防水带与消防栓的连接,并通过水带收放装置将消防水带收起,驱动装置驱使消防机器人继续向下一火点位置行驶;
28、第五步,到达下一火点位置后,驱动装置停止,消防机器人利用水箱内储水对火点进行灭火。
29、优选的,所述消防机器人的远程消防作战程序的第五步中,当水箱内储水用尽后,控制中心调配其他作战完成的机器人行驶至消防机器人所在位置,使其他机器人上的后置接驳口与消防机器人上前置接驳口处的消防水带对接。
30、优选的,所述驱动装置驱使消防机器人前往火点的过程中出现路障时,消防机器人可受无人机引导或人为引导避开路障,而在狭窄道路上遇到路障时,可通过多功能机械臂尝试清除路障,如清理难度较大,可通过人工控制清障设备进行清理,以确保消防机器人的行驶畅通。
31、本发明的有益效果为:
32、1、本发明中具有引航式灭火模式与自适应灭火模式,且在引航式灭火模式与自适应灭火模式下能够执行近程消防作战程序与远程消防作战程序,解决了现有技术中远距离作战需更换消防水带的问题;
33、2、本发明中通过在消防机器人上设置前后置接驳口、双向导轨、以及在双向导轨上行走调整使用位置实现消防栓接驳与清理路障的多功能机械臂,能够实现消防水带与消防栓的自动接驳与脱开、消防水带与另一消防机器人前置接驳口的自动接驳与脱开、以及对路障的自动清理,具有多功能实用价值,解决了现有技术中路障影响机器人行驶路线的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240617/45262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表