电动汽车控火毯铺设机器人
- 国知局
- 2024-07-05 17:07:33
本发明专利涉及电动汽车控火,具体涉及到一种控火毯自动铺设机器人。
背景技术:
1、近年来,我国新能源汽车大量普及,新能源汽车燃烧事故频发,为了更好的发展我国新能源汽车行业,应当降低汽车在使用中的安全隐患。一辆车的着火会蔓延到其他车辆且产生大量的有害气体,因此需要及时隔离和扑灭已燃车辆。目前已有的针对电动汽车起火的解决方式普遍存在以下问题:其他方式实现控火或灭火的成本高实现方式不够灵活;铺设用灭火毯重量较大不易使用人力铺设,且在使用过程中不能确保使用者的人身安全;不能极早期的采取措施将损失降到最低,在起火之后到消防队员到达后,再进行灭火造成的财产和人员伤亡是十分巨大的;在某些特殊区域如:高辐射区域,高保密区域,消防汽车不能够进入的狭小区域,使用机器人自动铺设技术是十分合适而且有必要的。
技术实现思路
1、本发明的目的在于提供一种控火毯铺设机器人,用于克服现有技术中的上述缺陷。本发明的技术方案为:一种控火毯自动铺设机器人,包括行走系统、铺设系统、控制系统。行走系统上方连接有用于搭载控制系统的机器人主体,并且机器人主体和铺设结构采用轻质隔热材料,确保机器人主体内部的控制系统和控火毯能够正常运行工作;机器人主体前方连接两个用于铺设控火毯的铺设系统,当铺设完毕后自锁结构自动启动将控火毯固定在警报车辆两侧,随即机器人主体返回出发位置。
2、在上述方案基础上,所述行走系统组件包括:驱动用嵌入式单片机一个,驱动用电机拓展板一个,电机驱动直流电源一个,驱动用5v直流电源一个,驱动用编码电机四个,所述驱动用5v直流电源与所述驱动用嵌入式单片机相连,为所述驱动用嵌入式单片机供电,所述电机驱动直流电源与所述驱动用电机拓展板相连,为所述驱动用电机拓展板供电,所述驱动用电机拓展板与所述驱动用嵌入式单片机以及4个所述驱动用编码电机相连,用于接收所述驱动用嵌入式单片机pwm信号,用来控制所述控火毯铺设机器人行走和转向。
3、在上述方案基础上,所述铺设系统组件包括:箱体,所述箱体的内部设置有螺杆,所述箱体的内部设置有与螺杆传动连接的驱动组件,所述箱体内部设置有无线信号传输模块一个,铺设用嵌入式单片机一个,铺设用电机拓展板一个,铺设用直流电源一个,铺设用编码电机一个,返程信号发射装置,所述螺杆的外壁设置有滑套,所述滑套的外壁设置有剪式伸缩机构,所述剪式伸缩机构的右侧设置有箱盖,所述箱盖的内部设置有限位组件,所述剪式伸缩机构的内壁设置有控火毯挂钩,所述铺设用编码电机的输出轴上设置有驱动齿轮,所述螺杆的外壁设置有与驱动齿轮传动连接的被动齿轮,所述滑套的数量为两个,两个所述滑套在螺杆的外壁呈前后对称分布,所述限位组件包括导向杆,所述导向杆的外壁且位于伸缩架的外壁设置有活动块,所诉导向杆末端的凹槽设有返程信号发射装置,所述无线通讯模块与所诉驱动用嵌入式单片机相连,用于接收微型计算机传递过来的启动信号,所述铺设用直流电源与铺设用嵌入式单片机相连,为所诉铺设用嵌入式单片机供电,所述铺设用直流电源与铺设用电机拓展板相连,用于给铺设用电机拓展板供电,所述铺设用电机拓展板与所述铺设用嵌入式单片机以及所述铺设用编码电机相连,用于接收所述铺设用嵌入式单片机pwm信号来驱动所述铺设用编码电机,实现控火毯的铺设。
4、在上述方案的基础上,所述螺杆的外壁设有互为反向的外螺纹槽,所述滑套的内壁开设有与外螺纹槽相咬合的内螺纹槽,所述滑套的数量为两个,两个所述滑套在螺杆的外壁呈前后对称分布,所述滑套可以运动进所述连接机构内部。
5、在上述方案的基础上,所述铺设系统末端设有限位组件包括导向杆,所述导向杆设有可供小圆珠滑动的滑轨,以及在所述滑轨的末端设有可供小圆珠滑落的凹槽,在所述凹槽内设有返程信号发射装置,所述导向杆的外壁且位于伸缩架的外壁设置有活动块,所述活动块与所诉导向杆接触面设有小圆珠,所诉小圆珠可以在所述导向杆上滑动,并能滑入所述凹槽触发返程信号发射装置,随即所述活动块不再移动。
6、在上述方案的基础上,所述箱盖的顶部可以向上掀开,便于控火毯的安装,所述箱体左侧设有与箱盖相咬合的安装槽,在不使用时可以紧闭所述箱体和所述箱盖,延长控火毯使用寿命。
7、在上述方案基础上,所述控制用组件包括:微型计算机一个、激光雷达一个、双目摄像头一个、红外测距传感器两个、车灯两个、光敏传感器若干、烟雾传感器若干、铺设用无线信号发射某块一个、返程信号接受模块一个,所述驱动用5v直流电源与面包板相连,为所述微型计算机供电,所述激光雷达与所述微型计算机相连,用于进行slam地图构建和障碍物检测,所述双目摄像头与所述微型计算机相连,用于进行警报车辆两侧间隙检测和车牌识别,所述红外测距传感器与所述微型计算机相连,置于所述机器人主体两侧,用于在烟雾浓度大时辅助所述激光雷达进行障碍物检测,所述车灯与驱动用嵌入式单片机相连,用于在光线不足的情况下为双目摄像头进行补光,所述光敏传感器与驱动用嵌入式单片机相连,用于检测环境光照强度,判断是否打开车灯,所述烟雾传感器与驱动用嵌入式单片机相连,用于检测环境烟雾浓度,判断是否启用红外测距传感器进行障碍物辅助检测,所述铺设用无线信号发射模块与微型计算机相连,当所述机器人主体到达警报位置,并且找准警报车辆两侧间隙后发出信号启动所述铺设用编码电机,所述返程信号接受模块与所述微型计算机相连,用于当铺设完成后所述机器人主体返回出发位置。
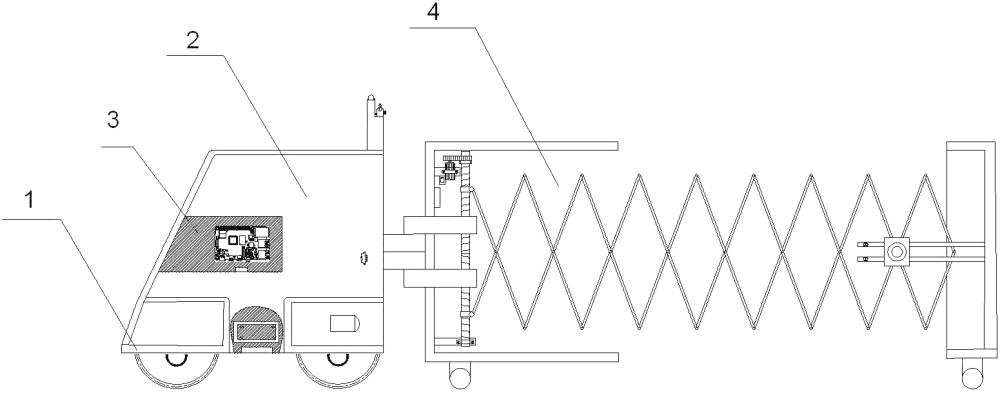
技术特征:1.如权利要求1所诉的电动汽车控火毯铺设铺设机器人,其特征在于,包括设置在地面上用于行走的行走机构(1),设置在所述行走机构(1)上的机器人主体(2),设置在所述机器人主体(2)内的控制系统(3),设置在所述机器人主体(2)前端的铺设装置(4),所述铺设装置(4),包括箱体(5),所述箱体 (5)的内部设置有螺杆(6),铺设用编码电机(7),铺设用直流电源(18),连接机构(15),滑套(9),导向杆(12),活动块(16),控火毯挂钩(14),箱盖(11),剪式伸缩机构(10),铺设用嵌入式单片机(8),所述箱体(5)的内部设置有与所述螺杆(6)传动连接的铺设用编码电机(7),所述箱体(5)的内部设置有所述铺设用嵌入式单片机(8)与所述铺设用直流电源(18)和所述铺设用编码电机(7)相连,所述螺杆(2)的外壁设置有所述滑套(9),所述滑套(9)的前端设有所述剪式伸缩机构(10),所述剪式伸缩机构(10)的右侧设置有所述箱盖(11),所述箱盖(11)的内部设置有导向杆(12),所述导向杆(12)左端设有凹槽,凹槽内部设有所述返程信号发射装置(13),所述剪式伸缩机构(10)的内壁设置有所述控火毯挂钩(14)与控火毯相连。
2.如权利要求1所述的连接机构(15),其特征在于,所述连接机构(15)上下对称,包括上弯曲c形杆(27),下弯曲c形杆(28),带齿杆(29),齿轮(30),弹簧(31),所述弹簧(31)和所述带齿杆(29)相连,所述带齿杆(29)与齿轮(30)啮合,所述齿轮(30)与所述c形杆(28)连接,所述齿轮(30)能够带动所述c形杆(28)转动,所述c形杆(27)与所述c形杆(28)接触可进行相对滑动。
3.如权利要求1所述的铺设装置(4),其特征在于,所述螺杆(6)的外壁设有互为反向的外螺纹槽,所述滑套(9)的内壁开设有与外螺纹槽相咬合的内螺纹槽,所述滑套(9)的数量为两个,两个所述滑套(9)在所述螺杆(6)的外壁呈前后对称分布,在所述铺设装置(4)末端设有限位器,所述限位器包括导向杆(12),所述导向杆(12)带有可供小圆珠滑动的滑槽,所述导向杆(12)的外壁且位于伸缩架的外壁设置有活动块(16),所述活动块(16)内侧带有滚动小圆珠。
4.如权利要求2所述的控火毯铺设机器人控制系统(3),其特征在于,采用在不发生碰撞的前提下,以到达目标点路径最短为算法逻辑,采用以astar为全局路径规划,以dwa为局部路径规划,使用c++编程将算法逻辑封装进所述微型计算机(20),所述驱动用编码器电机(26)采用pid算法控制转速,所述控制系统包括驱动用5v直流电源(17),铺设用直流电源(18),电机驱动直流电源(19),微型计算机(20),驱动用嵌入式单片机(21),铺设用嵌入式单片机(8),激光雷达(22),双目摄像头(23),红外测距传感器(24),车灯(25),驱动用编码电机(26),铺设用编码电机(7),返程信号发射装置(13),所述驱动用5v直流电源(17)与面包板相连,面包板与所述微型计算机(20)和所述驱动用嵌入式单片机(21)相连,为所述微型计算机(20)和所述驱动用嵌入式单片机(21)供电,所述铺设用直流电源(18)与所述铺设用嵌入式单片机(8)连接,所述铺设用直流电源(18)为所述铺设用嵌入式单片机(8)供电,所述电机驱动直流电源(19)与面包板相连,面包板与驱动用电机拓展板相连,用于给驱动用电机拓展板供电,所述车灯(25)与面包板相连,用于给双目摄像头(23)提供光源保证画面的清晰度,所述微型计算机(20)与所述驱动用嵌入式单片机(21),铺设用嵌入式单片机(8),激光雷达(22),双目摄像头(23),红外测距传感器(24)相连,进行信号传输,用于实时观测周围环境,所述驱动用嵌入式单片机(21)与驱动用电机拓展板相连,所述铺设用嵌入式单片机(8)与铺设用用电机拓展板相连,驱动用电机拓展板还与4个所述驱动用编码器电机(26)相连,驱动用编码电机1用于驱动控火毯铺设机器人左前轮,驱动用编码电机2用于驱动控火毯铺设机器人右前轮,驱动用编码电机3用于驱动控火毯铺设机器人左后轮,驱动用编码电机4用于驱动控火毯铺设机器人右后轮,所述铺设用嵌入式单片机(8)与铺设用电机拓展板相连,所述铺设用编码器电机(7)用于带动所述螺杆(6)转动,所述活动块(16)内侧小圆珠进入所述导向杆(12)末端的圆槽,触发所述返程信号发射装置(13),所述微型计算机(20)接收到信号返回出发位置。
技术总结本发明公开了一种电动汽车控火毯铺设机器人,涉及电动汽车控火技术领域,包括:设置在地面上用于行走的四轮行走机构;搭载在机器人内部的控制系统;搭载在机器人外壳上的光学传感器;设置在机器人前端的伸缩机构;设置在伸缩机构上方的控火毯。本发明提出的控火毯铺设机器人,当接收到车辆火警警报后,机器人自动行走避障,到达警报车辆位置,识别警报车辆左右间隙,触发控火毯铺设装置向间隙内伸出,搭载于铺设装置上的控火毯随即在间隙内展开,使得警报车辆左右两侧与其他车辆隔离,保护周围其他车辆。技术研发人员:甄海生,康玮安受保护的技术使用者:海南大学技术研发日:技术公布日:2024/3/24本文地址:https://www.jishuxx.com/zhuanli/20240617/46635.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表