具有被动驾驶功能的模块化可拼装交管机器人的制作方法
- 国知局
- 2024-07-05 17:52:46
本申请涉及智慧交通机器人,尤其涉及具有被动驾驶功能的模块化可拼装交管机器人。
背景技术:
1、由于城市交通的复杂性和多变性,传统的人工交通监管方式逐渐无法满足城市交通管理的需求,交通管理机器人在交通管理领域也逐渐成为一种趋势。作为一种新型的交通管理方式,交通管理机器人是具有高度灵活性的自动化机器,交通管理机器人可以辅助甚至替代人类完成危险、繁重、复杂的工作,不仅能够有效地维护道路交通秩序,还能够有效地减少人力资源的使用,为人民群众的生产、生活、出行等方面提供更加安全、便利的服务。
2、交通管理机器人最初的设计是为了解决城市交通管理中的一些问题,比如人力不足、管理疏漏等。它们通常是一些能够自动巡逻,识别车辆基本情况,记录违法行为等机器人。随着科技的不断发展,越来越多种类和功能的交通管理机器人被广泛应用于交通管理领域,比如处理恶劣交通事故、驾驶事故车辆、高峰期交通拥堵疏导、交通指挥、临时信号灯功能、建立城市交通智能化管理平台、甚至交通管理中其他参与者的辅助功能等服务。
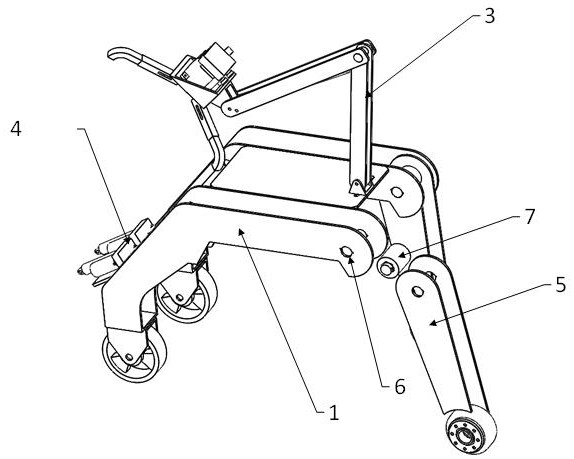
3、交通管理机器人一般包括机械结构、电子电路、线缆布线,而现有技术的交通管理机器人各部件之间多数是采用连接件固定连接,也有少数的采用活动连接,拆装繁琐,费时费力;使用中存在松动脱落隐患,需定期检查紧固;线缆布线与机械连接相互独立,组装困难;零部件繁多,资源浪费,不能让交通管理机器人组合安装更便捷省力;而且由于交通管理机器人控制车辆动力系统和制动系统的部分一般采用旋转结构进行收纳,需要一定的旋转空间,一定程度上增大了机器人的占用空间,尤其是车辆驾驶位空间受限,实用性较差。
4、本实用新型的目的是提供一种结构简单的插接结构,且实用性好的具有被动驾驶功能的模块化可拼装交管机器人,适合携行和在现场根据任务需要拼装成不同功能的机器人,适合特警排爆、刑警缉毒、交警指挥、消防应急救援等多警种不同任务的多场景综合性使用。
技术实现思路
1、本申请的目的是提供具有被动驾驶功能的模块化可拼装交管机器人,主体基座设有多个插接座,定位装置、抓取装置、动力装置、运动装置均设有插接体,通过插接体与相应位置插接座的快速插接,实现机器人各部分的机械和电气的同时连接和拆卸,兼具经济性和实用性;通过插接体与插接座多位置变换插接,完成根据任务需要在现场快速拼装成不同功能的机器人。
2、为实现上述目的,本申请提供了如下方案:
3、具有被动驾驶功能的模块化可拼装交管机器人,包括:主体基座、定位装置、抓取装置、动力装置、运动装置,所述主体基座包括多个插接座,所述插接座内嵌于所述主体基座内部,所述插接座包括第一预埋体、第二预埋体、定位凹槽,所述定位凹槽位于所述第一预埋体内,所述定位凹槽与所述第二预埋体连通;
4、所述运动装置包括插接体,所述插接体固定于所述运动装置的顶端;所述插接体包括固定轴、弹性部件、伸缩轴、连接凸台,所述固定轴两端开有盲孔,所述盲孔的内表面开有键槽,所述盲孔的内表面开有键槽,所述弹性部件的一端与所述盲孔的内端面固定连接,所述弹性部件的另一端与所述伸缩轴的一端固定连接,所述伸缩轴的另一端与所述连接凸台固定连接;所述连接凸台与所述伸缩轴为一体成型结构;所述连接凸台包括第三预埋体、第四预埋体、定位凸柱,所述定位凸柱与所述第四预埋体固定连接,所述第三预埋体覆于所述第四预埋体表面;通过压缩所述弹性部件,所述伸缩轴处于收缩状态时,使所述连接凸台的所述定位凸柱处于所述固定轴外端侧的所述键槽内,所述伸缩轴处于伸长状态时,所述定位凸柱插接在位于所述主体基座上对应位置的所述插接座的所述定位凹槽内,完成所述运动装置与所述主体基座的机械和电气连接。
5、进一步的,所述动力装置包括插接体,所述插接体与所述动力装置固定连接;所述主体基座安装所述动力装置处的两侧分别设置有滑轨和两个所述插接座,所述滑轨的上端与所述插接座连通,所述滑轨的下端与另一个所述插接座连通,通过压缩所述弹性部件,所述伸缩轴处于收缩状态时,使所述连接凸台的所述定位凸柱处于所述固定轴外端侧的所述键槽内,所述伸缩轴处于伸长状态时,所述定位凸柱插接在所述滑轨上端的所述插接座的所述定位凹槽内,完成所述动力装置与所述主体基座的插接固定;机器人进入车辆驾驶室执行驾驶功能时,所述定位装置调整好所述主体基座在驾驶位的位置后,所述动力装置通过压缩所述插接体的所述弹性部件,使所述伸缩轴置于所述滑轨上,所述插接体带动所述动力装置沿所述滑轨下滑,至所述滑轨下端的所述插接座的所述定位凹槽内,完成所述动力装置的平移滑出和固定,所述动力装置执行油门和刹车的控制动作。
6、进一步的,所述第一预埋体为绝缘材料,用于所述第二预埋体与金属连接部分绝缘;所述第三预埋体为绝缘材料,用于所述第四预埋体与金属连接部分绝缘;所述第二预埋体的一端与线缆连接,所述第二预埋体的另一端与所述第四预埋体连接,所述第四预埋体的另一端与线缆连接;
7、进一步的,所述固定轴为圆柱体,所述伸缩轴为六棱柱体,所述固定轴两端开有内切面为六边形的盲孔,所述伸缩轴与所述六边形盲孔配合连接,用于所述固定轴与所述伸缩轴的限位;所述固定轴的端面与所述主体基座侧滑动配合,用于对所述动力装置的左右限位;
8、进一步的,所述定位凹槽可以为多个,所述定位凹槽为环形间隔排列;所述连接凸台的所述定位凸柱插接在所述插接座的不同位置的所述定位凹槽内,完成不同功能时所述插接座和所述插接体不同的连接状态,实现携行和在现场根据任务需要拼装成不同功能的机器人;
9、本申请技术方案的有益效果:
10、具有被动驾驶功能的模块化可拼装交管机器人,插接座内嵌有用于线缆连接的第二预埋体,连接凸台内嵌有用于线缆连接的第四预埋体,通过固定于各部分的连接凸台的定位凸柱插接在固定于主体基座上的对应插接座,完成本申请交管机器人的机械插接,同时完成插接部分的电气连接;实现机械和电气的同时连接和拆卸,快速便捷。
11、具有被动驾驶功能的模块化可拼装交管机器人,采用一体化插接结构,降低人工成本;减少零部件的使用,节约经济成本,避免了使用过程中零部件松动脱落的潜在隐患,提高机器人可靠性。
12、本申请的动力装置通过主体基座对应位置上设置滑轨,滑轨两端分别连通插接座,完成快捷插接的同时,使动力装置实现沿滑轨顺向滑动,不占用多余空间,解决了动力机构在车辆驾驶位置空间受限的情况下进行车辆动力系统和制动系统的控制,实用效果突出。
13、插接座的定位凹槽可以为多个间隔排列,连接凸台的定位凸柱插接在插接座不同位置的定位凹槽内,实现连接凸台与插接座不同角度的旋转固定,完成本申请机器人各部分相对于主体基座的不同角度的快速变换拼装连接,配合不同警种对本申请机器人在现场实现如低匍匐、特殊角度、特殊场景时对各部件不同安装位置快速拼装的需求。
技术特征:1.具有被动驾驶功能的模块化可拼装交管机器人,包括:主体基座、定位装置、抓取装置、动力装置、运动装置,其特征在于,所述主体基座包括多个插接座,所述插接座内嵌于所述主体基座内部,所述插接座包括第一预埋体、第二预埋体、定位凹槽,所述定位凹槽顶端与所述第二预埋体连接,所述第二预埋体与所述第一预埋体连接;
2.根据权利要求1所述的具有被动驾驶功能的模块化可拼装交管机器人,其特征在于,所述第一预埋体为绝缘材料,用于所述第二预埋体与金属连接部分绝缘;所述第三预埋体为绝缘材料,用于所述第四预埋体与金属连接部分绝缘;所述第二预埋体的一端与线缆连接,所述第二预埋体的另一端与所述第四预埋体连接,所述第四预埋体的另一端与线缆连接;所述连接凸台的所述定位凸柱插接在所述插接座的所述定位凹槽内完成机械连接的同时实现电气连接。
3.根据权利要求1所述的具有被动驾驶功能的模块化可拼装交管机器人,其特征在于,所述固定轴两端开有盲孔,所述盲孔的内表面开有键槽,所述弹性部件的一端与所述盲孔的内端面固定连接,所述弹性部件的另一端与所述伸缩轴的一端固定连接,所述伸缩轴的另一端与所述连接凸台固定连接;所述连接凸台与所述伸缩轴为一体成型结构;所述伸缩轴处于收缩状态时,使所述连接凸台的所述定位凸柱处于所述固定轴外端侧的所述键槽内,所述伸缩轴处于伸长状态时,所述定位凸柱插接在位于所述主体基座上对应位置的所述插接座的所述定位凹槽内。
4.根据权利要求3所述的具有被动驾驶功能的模块化可拼装交管机器人,其特征在于,所述伸缩轴为六棱柱体,所述固定轴两端开有内切面为六边形的盲孔,所述伸缩轴与所述六边形盲孔配合连接,用于所述固定轴与所述伸缩轴的限位;所述固定轴的端面与所述主体基座侧滑动配合,用于对所述动力装置的左右限位。
5.根据权利要求1所述的具有被动驾驶功能的模块化可拼装交管机器人,其特征在于,所述主体基座安装所述动力装置处设置有滑轨和两个所述插接座,所述滑轨的上端与所述插接座连通,所述滑轨的下端与另一个所述插接座连通,通过压缩所述弹性部件,使所述连接凸台的所述定位凸柱插接在所述滑轨上端的所述插接座的所述定位凹槽内,完成所述动力装置与所述主体基座的固定;通过压缩所述弹性部件,使所述伸缩轴置于所述滑轨上,所述伸缩轴带动所述动力装置沿滑轨下滑,至所述滑轨下端的所述插接座的所述定位凹槽内,完成所述动力装置的滑出和固定。
6.根据权利要求1所述的具有被动驾驶功能的模块化可拼装交管机器人,其特征在于,所述定位凹槽可以为多个,间隔排列;所述连接凸台的所述定位凸柱插接在所述插接座的不同位置的所述定位凹槽内,完成不同功能时所述插接座和所述插接体不同的连接状态。
技术总结本申请公开了具有被动驾驶功能的模块化可拼装交管机器人,涉及智慧交通技术领域。包括:主体基座、定位装置、抓取装置、动力装置、运动装置,主体基座设有多个插接座,定位装置、抓取装置、动力装置、运动装置均设有插接体,插接座包括第一预埋体、第二预埋体、定位凹槽;插接体包括固定轴、弹性部件、伸缩轴、连接凸台,连接凸台包括第三预埋体、第四预埋体、定位凸柱,通过压缩弹性部件,使插接体的定位凸柱插接在相应位置插接座的定位凹槽内,使插接体的第四预埋体的一端与插接座的第二预埋体的一端连接,第四预埋体的另一端与线缆连接,第二预埋体的另一端与线缆连接,实现机械和电气的同时连接和拆卸,快速便捷。技术研发人员:王士元,王川受保护的技术使用者:维特瑞交通科技有限公司技术研发日:20230912技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49424.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表