包括环境传感器的机器人系统的制作方法
- 国知局
- 2024-07-05 17:54:10
本发明涉及一种机器人系统,该系统包括在与其相关联的操作范围内可移动的部件、用于控制可移动部件在操作范围内移动的控制器以及用于监测操作范围中的至少一个区域的环境传感器,以使控制器能够根据与所述区域内障碍物或人员的存在、部件相对于工件的位置等有关的感测结果来调整部件的移动。
背景技术:
1、这种环境传感器最直接的选择是电子相机。然而,这些相机只能提供与环境中物体位置相关的垂直于相机视线的二维信息,而不能提供沿视线本身的信息。因此,us9310608 b2提出一种机器人系统,使用激光扫描仪获取机器人车辆附近物体距离的相关信息。使用第一激光扫描仪扫描水平面,可以分辨出物体是在警戒区还是在安全区、距离扫描仪更近。由于水平面以外的物体不能被第一激光扫描仪检测到,提供了第二激光扫描仪,其光束在一次扫描过程中会被多个反射镜相继转向,每个反射镜因此限定相对于水平面倾斜的辅助检测平面。
2、最近,3d深度相机在应用(诸如移动电话)中开始流行起来。它们将具有二维光传感器阵列的常规电子相机与飞行时间装置结合在一起,飞行时间装置发射轮询信号,由相机视场中的物体反射,并根据轮询信号到达物体和返回至装置所需的时间估算相对于所述物体的距离。这种3d深度相机的视场有限,适合摄影,但可能不够宽,无法监测机器人系统中可移动部件的整个操作范围。
技术实现思路
1、本发明的目的是提供一种机器人系统,在该系统中,即使环境传感器的视场先验地与操作范围不匹配,也可以使用诸如3d深度相机之类的环境传感器来监测可移动部件的操作范围。
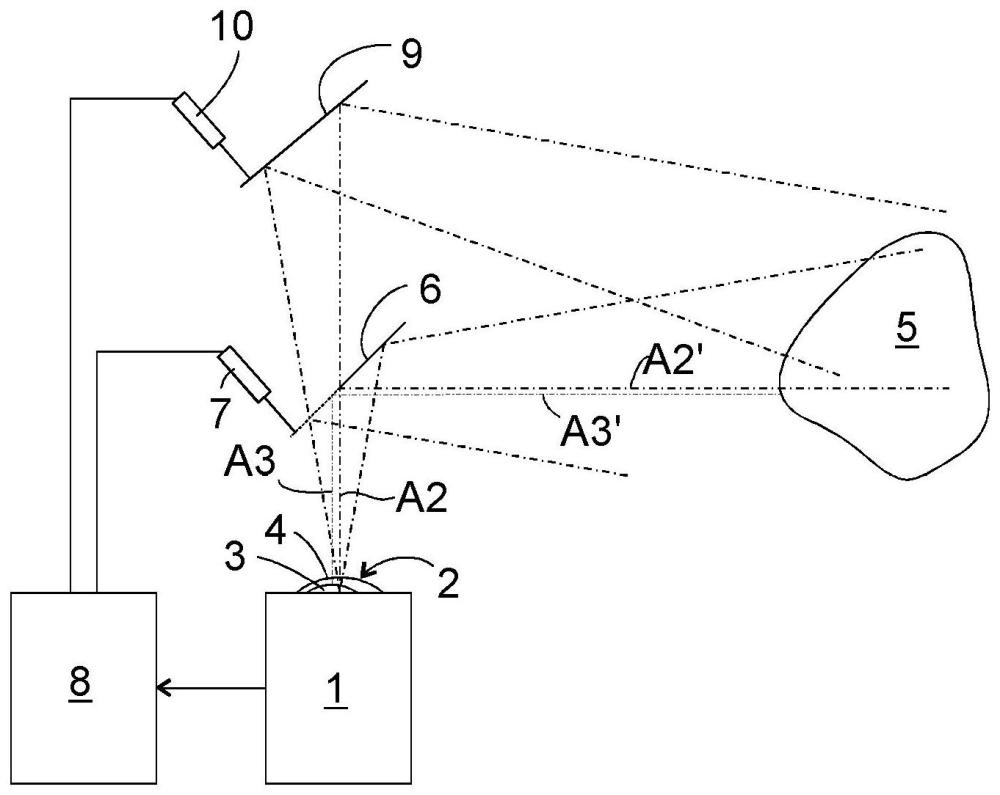
2、上述目标通过一个机器人系统来实现,该机器人系统包括在操作范围内可移动的部件、用于控制可移动部件运动的控制器和用于监测操作范围中的至少一个区域的环境传感器。环境传感器包括相机和tof装置,相机适于传送相机的视场的2d图像,tof装置用于基于从tof装置到物体并且返回的轮询信号的传播时间,来测量环境传感器和所述视场中的物体之间的距离,其中在区域与环境传感器之间的光路中设置有光学元件,用于将视场重定向到所述区域。
3、根据本发明的第一种优选应用,可移动部件是相对于基座能够移动的机械臂。在这种情况下,环境传感器可以被设置在所述基座上,使得当机械臂移动时基座将保持静止。
4、当基座包括支撑机械臂的直立支柱时,反射镜优选地被定位在环境传感器和支柱之间。这样,单个环境传感器能够监测支柱的附近区域的大部分。
5、根据第二种优选应用,可移动部件是agv。在这种情况下,环境传感器优选地被设置在agv上,以便与agv一起移动。
6、光学元件优选地包括反射镜,也可以包括透镜。但与透镜相比,反射镜有两个优点,一个优点是由于轮询信号从tof装置到反射物体并且通过反射镜返回的路径可能只通过空气,因此飞行时间与路径长度成正比,而如果是透镜,在将测量的飞行时间转换为距离时必须考虑透镜的厚度。另一个优点是,在可见光光谱之外的大范围内,具有高反射率的反射镜也很容易获得,使得轮询信号的波长可以是人眼和相机看不见的,而这种轮询信号可能会被许多阻挡某些uv或ir波长范围的普通透镜材料吸收。
7、为了使反射镜适应可移动部件的操作范围,反射镜可以可枢转地安装。反射镜的安装可以允许手动调节。优选地用于枢转反射镜的致动器被可操作地连接到控制器,从而使控制器能够将相机的视场引导到操作范围中需要信息的任何区域。在反射镜处于给定方向情况下,一次可监测的区域可能小于操作范围。不过,通过枢转反射镜,可以对整个操作范围进行实时多路监测。
8、备选地,相机的视场可以通过具有有限焦距的光学元件进行调整。根据焦距的正或负,光学元件可以使视场变窄或变宽。因此,如果相机本身的视场太窄而无法覆盖整个操作范围,那么通过提供具有负焦距的光学元件,就可以根据需要扩大视场以覆盖操作范围。当光学元件能够在区域和环境传感器之间的光路中的位置和偏离光路的位置之间移动时,视场就可以变化,优选地是在覆盖整个操作范围和只覆盖其中感兴趣的细节之间变化。
9、备选地,视场可以通过至少在一个维度上具有可变焦距的光学元件以及用于在至少一个宽视场状态和一个窄视场状态之间改变焦距的致动器来改变,该致动器可操作地连接到控制器。具有可变焦距的变焦透镜在摄影中很常见,并且可以在本发明的机器人系统中使用。一维曲率可变的反射镜特别容易制造和控制。
10、当可移动部件是机械臂时,控制器可适于控制窄视场状态中的视场,以包括机械臂的末端执行器。因此,在宽视场状态中,相机可以监测整个操作范围,以便检测可能会阻挡机器人预定路径的人或物体,而在窄视场状态中,则可以高分辨率监测末端执行器,并且因此可以对其进行精确控制。
11、当可移动部件是agv时,控制器优选地能够在agv传播速度为低时设置宽视场状态,在agv传播速度为高时设置窄宽视场状态。在第一种情况下,宽视场可确保检测到任何足够靠近到可能与agv发生碰撞的人或物体,使得控制器能够为agv规划要遵循的路径,在该路径中碰撞被避免。在后一种情况下,尽管可能发生碰撞的人或物体距离agv仍然很远,但仍能够可靠地检测到并且能以必要的精度对其进行观察,使得控制器能够避免碰撞。
12、此外,如果控制器适于在宽视场状态中在来自相机的图像中检测人,那么当检测到人时,它也可以适于控制光学元件进入窄视场状态,窄视场状态具有至少部分地覆盖人的视场。一方面,可以精确地监测人的整体运动,并考虑人的速度和运动方向的变化,以用于以最小的延迟控制可移动部件的运动;另一方面,密切监测人促进识别人的预定手势,并在控制可移动部件时考虑到这些手势。
技术特征:1.一种机器人系统,包括在操作范围内可移动的部件(14,24)、用于控制所述可移动部件(14,24)运动的控制器(8)和用于监测所述操作范围中的至少一个区域的环境传感器(1),所述环境传感器(1)包括相机(2)以及tof装置(3),所述相机适于传送所述相机(2)的视场(22)的2d图像,所述tof装置用于基于从所述tof装置到所述视场中的物体(18)并且返回的轮询信号的传播时间,来测量所述环境传感器(1)和所述物体(18)之间的距离,其特征在于,在所述区域与所述环境传感器(1)之间的光路(2a,2a';3a,3a')中设置有光学元件(6,9,11),用于将所述视场(22)重定向到所述区域。
2.根据权利要求1所述的机器人系统,其中所述可移动部件是相对于基座(13)能够移动的机械臂(14),并且所述环境传感器(1)被设置在所述基座(13)中。
3.根据权利要求2所述的机器人系统,其中所述基座(13)包括支撑所述机械臂(14)的直立支柱(16),并且反射镜(11)被定位在所述环境传感器(1)和所述支柱(16)之间。
4.根据权利要求1所述的机器人系统,其中所述可移动部件是agv(24),并且所述环境传感器(1)被设置在所述agv(24)中。
5.根据前述权利要求中任一项所述的机器人系统,其中所述光学元件包括反射镜(6,9,11)。
6.根据权利要求5所述的机器人系统,其中所述反射镜(6,9,11)被可枢转地安装,并且用于枢转所述反射镜(6,9,11)的致动器(10)被可操作地连接至所述控制器(8)。
7.根据前述权利要求中任一项所述的机器人系统,其中所述光学元件(11)在至少一个维度上具有可变曲率和/或焦距,并且用于在至少一个宽视场状态和一个窄视场状态之间改变所述曲率和/或所述焦距的致动器(12)被可操作地连接至所述控制器(8),或者
8.根据权利要求7和权利要求2或3所述的机器人系统,其中所述控制器(8)适于控制所述窄视场状态中的视场,以包括人(18)或所述机械臂(14)的末端执行器(17)。
9.根据权利要求7和权利要求4所述的机器人系统,其中所述控制器(8)适于在所述agv(24)的传播速度为低时设置所述宽视场状态,并且在所述agv(24)的传播速度为高时设置所述窄宽视场状态。
10.根据权利要求7至9中任一项所述的机器人系统,其中所述控制器(8)适于在所述宽视场状态中在来自所述相机的图像中检测人(18),并且当检测到所述人时,控制所述光学元件进入所述窄视场状态,所述窄视场状态具有至少部分地覆盖所述人的所述视场。
技术总结一种机器人系统,包括在操作范围内可移动的部件(14,24)、用于控制可移动部件(14,24)运动的控制器(8)和用于监测操作范围中的至少一个区域的环境传感器(1)。环境传感器(1)包括相机(2)和TOF装置(3),相机适于传送相机(2)的视场(22)的2D图像,TOF装置用于基于从TOF装置(3)到物体(18)并且返回的轮询信号的传播时间,来测量环境传感器(1)和所述视场中的物体(18)之间的距离,其特征在于,在区域与环境传感器(1)之间的光路(2A,2A';3A,3A')中设置有光学元件(6,9,11),用于将视场(22)重定向到所述区域。技术研发人员:哈拉尔德·斯塔布,比约恩·马蒂亚斯,尼玛·埃纳亚蒂,戴凡受保护的技术使用者:ABB瑞士股份有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49575.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表