一种VR头戴设备驱动的人形机器人头部运动控制系统的制作方法
- 国知局
- 2024-07-05 17:55:00
本发明涉及vr技术与机器人控制,尤其涉及一种vr头戴设备驱动的人形机器人头部运动控制系统。
背景技术:
1、vr技术在人机交互(hri)研究中越来越多地被采用,以增强交互的沉浸感和真实感。然而,vr与hri的集成也引入了新的挑战,如延迟问题、虚拟与真实环境间的不匹配以及可能对人类用户造成的不良影响。尽管存在这些挑战,vr在hri中的应用具有提供改进通信、增加安全性和加强培训与教育的潜在优势。
2、目前,vr技术与机器人控制技术领域的研究还相对较少,随着个性化、互动性和吸引力不断增强的机器人的发展,以及虚拟现实创新的普及,我们可以预见vr在控制机器人以完成医院、学校和工厂等各种任务中的广泛应用。但仍然存在一些挑战,例如需要更先进的vr技术来提供更真实和沉浸式的体验,需要开发更具人性化的机器人模型以改善社交互动,以及需要更好的方法来评估vr在人机交互中的有效性。
技术实现思路
1、本发明提供了一种利用高精度vr头戴设备来实现对人形机器人头部运动的精确控制,同时具备远近视力和散光的自适应视觉画面调节功能。本发明结合了先进的眼球追踪技术、脑电波分析以及可变焦点显示(vfd)技术,实现对vr环境的个性化调整,以适应不同用户的视觉需求。
2、为了实现上述目的,本发明采用了如下技术方案:
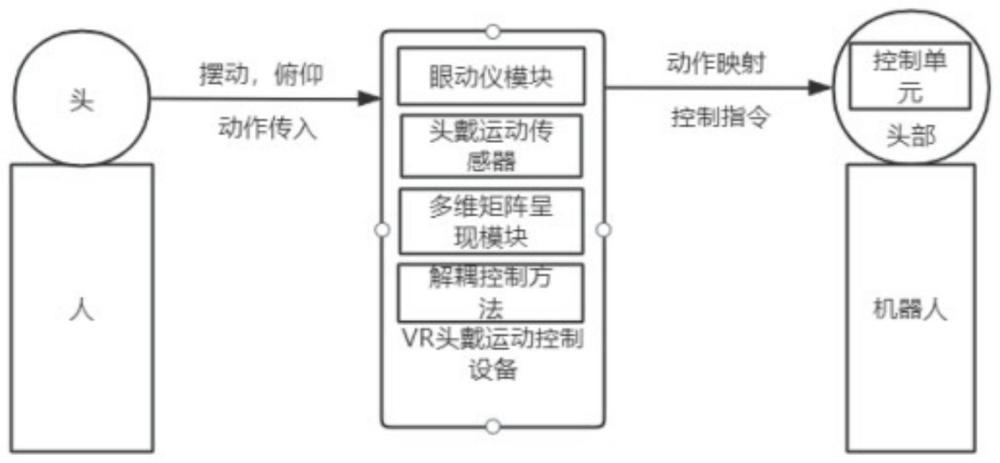
3、一种vr头戴设备驱动的人形机器人头部运动控制系统,包括vr头戴运动控制设备和人形机器人本体,所述vr头戴运动控制设备内包括用于精准捕捉用户头部的imu(惯性测量单元)、用于精准捕捉用户眼球动作的高性能眼动仪、采用可变焦点显示技术(vfd)的视觉调节单元、脑电波分析单元;
4、所述视觉调节单元用于自动调整vr环境中的图像焦距、清晰度和对比度;
5、所述脑电波分析单元通过eeg传感器捕捉用户脑电波活动,并利用机器学习算法分析数据;
6、所述人形机器人本体内包括机器人头部控制单元,所述机器人头部控制单元包含精密伺服电机和驱动器,确保机器人头部运动的精确和平稳,以及高级控制算法实现复杂的头部动作和转动。
7、本发明不仅提高了远程控制的精度和互动性,还显著改善了用户的视觉体验,特别是对于有视力障碍的用户。这种综合应用的技术方案,使得vr头戴设备在遥控机器人操作、虚拟培训和教育等领域的应用更加广泛和有效。
8、作为本技术方案的进一步改进方案:所述视觉调节单元可根据用户的视力特征和眼球运动信息,应用动态图像处理算法,以优化虚拟环境中的视觉呈现,其中动态图像处理算法包括自适应焦距调整模型和清晰度优化算法。
9、作为本技术方案的进一步改进方案:所述脑电波分析单元使用先进的神经网络模型和数据处理框架来提升eeg数据的分析效率和预测用户意图的准确性。
10、作为本技术方案的进一步改进方案:所述脑电波分析单元增加个性化设置选项,允许用户根据个人喜好调整视觉呈现。
11、作为本技术方案的进一步改进方案:所述机器人头部控制单元采用模块化设计,使机器人头部的各个部分可以独立控制和更换,提高设备的灵活性和维护便捷性。
12、作为本技术方案的进一步改进方案:该系统还包括数据融合模块,所述数据融合模块应用粒子滤波和卡尔曼滤波算法,整合来自编码器、角度传感器等的不同传感器数据,提高对头部运动的估计精度。
13、这些改进方案旨在提高本发明的技术性能,增强用户体验,并扩展其在各种应用场景中的适用性。通过对眼球追踪和视觉调节技术的升级,以及对脑电波分析和机器人头部控制单元的增强,本发明在确保操作精度和响应速度的同时,也为用户提供了更加舒适和定制化的交互体验。
14、作为本技术方案的进一步改进方案:还包括利用该控制系统的人形机器人远程操作方法,包括以下步骤:
15、s1,通过vr头戴设备捕捉用户的头部和眼球运动;
16、s2,将捕捉到的动作数据通过解耦控制方法分解处理;
17、s3,将解耦后的数据转换为机器人头部的运动指令;
18、s4,通过机器人头部控制单元执行上述指令,实现精细且自然的机器人头部运动。
19、与现有技术相比,本发明的有益效果是:
20、本发明具备远近视力和散光的自适应视觉调节功能,通过高级图像处理和眼动追踪技术,大幅提升vr体验的自然性和舒适度。此外,融合多种传感器数据、采用解耦控制方法和粒子滤波以及卡尔曼滤波技术,显著提高了远程控制的精度和互动性。
21、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:1.一种vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,包括vr头戴运动控制设备和人形机器人本体,所述vr头戴运动控制设备内包括用于精准捕捉用户头部的惯性测量单元、用于精准捕捉用户眼球动作的高性能眼动仪、采用可变焦点显示技术的视觉调节单元、脑电波分析单元;
2.根据权利要求1所述的一种vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,所述视觉调节单元可根据用户的视力特征和眼球运动信息,应用动态图像处理算法,以优化虚拟环境中的视觉呈现,其中动态图像处理算法包括自适应焦距调整模型和清晰度优化算法。
3.根据权利要求2所述的一种vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,所述脑电波分析单元使用先进的神经网络模型和数据处理框架来提升eeg数据的分析效率和预测用户意图的准确性。
4.根据权利要求3所述的一种vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,所述脑电波分析单元增加个性化设置选项,允许用户根据个人喜好调整视觉呈现。
5.根据权利要求4所述的一种vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,所述机器人头部控制单元采用模块化设计,使机器人头部的各个部分可以独立控制和更换,提高设备的灵活性和维护便捷性。
6.根据权利要求5所述的一种vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,该系统还包括数据融合模块,所述数据融合模块应用粒子滤波和卡尔曼滤波算法,整合来自编码器、角度传感器等的不同传感器数据,提高对头部运动的估计精度。
7.根据权利要求1-6任意一项所述的vr头戴设备驱动的人形机器人头部运动控制系统,其特征在于,还包括利用该控制系统的人形机器人远程操作方法,包括以下步骤:
技术总结本发明公开了一种VR头戴设备驱动的人形机器人头部运动控制系统,包括VR头戴运动控制设备和人形机器人本体,所述VR头戴运动控制设备内包括用于精准捕捉用户头部的IMU、用于精准捕捉用户眼球动作的高性能眼动仪、采用可变焦点显示技术的视觉调节单元、脑电波分析单元。本发明具备远近视力和散光的自适应视觉调节功能,通过高级图像处理和眼动追踪技术,大幅提升VR体验的自然性和舒适度,此外,本发明还融合多种传感器数据、采用解耦控制方法和粒子滤波以及卡尔曼滤波技术,显著提高了远程控制的精度和互动性。技术研发人员:贺晓彤,林飞,董艳灵,权豪,徐朝阳,董琳,耿嘉成受保护的技术使用者:山东智慧医工电子信息科技有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49648.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表