一种可实现2、3、4自由度的模块化高速并联机器人
- 国知局
- 2024-07-08 10:42:04
本发明涉及一种并联机器人,尤其涉及一种可实现多自由度、具有多操作模式的模块化高速并联机器人。
背景技术:
1、随着机器人技术的迅猛发展,并联机器人在食品、化工、电子、包装行业的分拣、搬运方面展现出优良的工作性能。并联机器人是以并联方式驱动的一种闭环机构,其具有高速、高精度、承载能力大、动态响应好的特点,因此并联机器人被广泛应用于工业生产。目前主流的并联机器人大多只能实现单一的操作模式,具有唯一的自由度。传统的diamond并联机械手仅能实现平面二自由度平动,delta并联机器人仅能实现空间内的三平动,scara并联机器人可以实现三平动一转动,但转动能力较弱,转动幅度较小。大部分的并联机器人操作单一,无法实现“一机多模式、多自由度”的操作情形。
技术实现思路
1、本发明提供一种可实现2、3、4自由度的模块化高速并联机器人,所要解决的技术问题为:克服现有技术的缺点,提供一种既可以实现平面二自由度平动,又可以实现空间三平动以及空间三平一转(转动为整周回转)的并联机器人。实现了一台机器人,拥有多种操作模式,可实现多个自由度;机器人整体结构紧凑、操作方便、运动灵活,具有很高的刚度和强度,适用多种复杂环境。
2、为了解决上述技术问题,本发明采用如下技术方案:
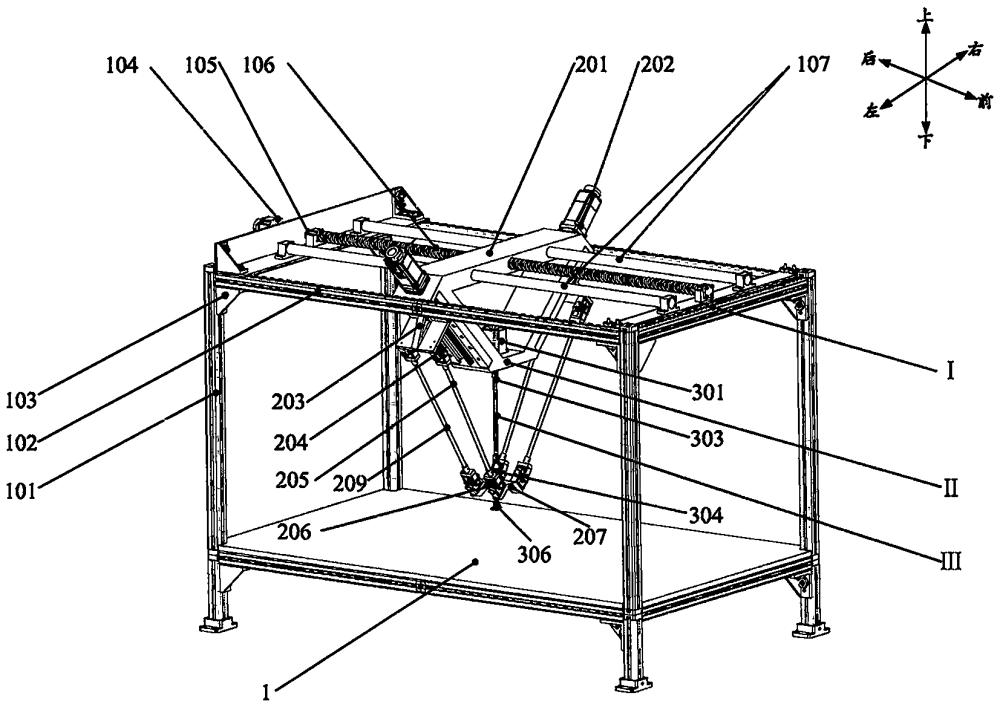
3、一种可实现2、3、4自由度的模块化高速并联机器人,包括并联机器人支撑框架模块、并联机器人主体结构模块和并联机器人中心万向轴支链模块。并联机器人支撑框架模块包括工业铝型材双层框架、第一驱动电机、刚性联轴器、驱动丝杠、平行圆柱导轨;并联机器人主体结构模块包括定平台、线性驱动模组、连接架、动平台、布置于所述连接架和动平台之间的四条从动支链组;并联机器人中心万向轴支链模块包括中心驱动电机、上、下端柔性联轴器、伸缩式万向节、末端执行器连接轴和末端执行器;
4、进一步地;所述的并联机器人支撑框架模块主体构型为工业铝型材双层框架结构;包括四个竖直支撑柱,四个所述的竖直支撑柱的底部均安装有支脚;四个所述的竖直支撑柱之间每层通过四个横向条连接,四个所述的竖直支撑柱和四个横向条交错分布,相邻的支撑柱和横向条之间通过直角块连接;
5、进一步地;所述的工业铝型材双层框架上端中部安装有一根贯穿整个框架长度的驱动丝杠;驱动丝杠的输入轴端通过刚性联轴器与第一驱动电机的输出轴端相连接;平行圆柱导轨等距设置于驱动丝杠的两侧;
6、进一步地;所述的定平台整体形状呈等腰梯形,定平台上底的长度要大于下底,其上底与腰的夹角为定平台的结构角(α),结构角(α)的角度可以根据实际需求进行调整;定平台的上底中部位置设置有通孔,通孔内设置有螺纹导路;在中部通孔两端的相对位置处设置相应的平行通孔;
7、进一步地;所述并联机器人支撑框架模块中设置的驱动丝杠与定平台的上底中部位置的通孔内螺纹导路可以螺旋移动;定平台平行通孔可以沿着并联机器人支撑框架模块中设置的平行导轨相对移动;
8、进一步地;所述的线性驱动模组包括驱动电机、刚性联轴器、传动丝杠、基座和驱动滑块;所述的线性驱动模组的基座沿着定平台左右两腰长方向固定在定平台两腰位置处;所述的传动丝杠的输入轴端通过刚性联轴器和驱动电机的输出轴端相连接;
9、进一步地;所述的连接架整体构型呈直角形;所述的连接架垂直面与所述的线性驱动模组的驱动滑块相固接;所述的连接架水平面与所述的两条从动支链组的上端虎克铰的上叉型铰链座相固连;所述虎克铰的上叉型铰链座平行设置于连接架水平面的前后相对位置处且螺栓连接;所述的两条从动支链组的上端虎克铰十字轴的连架轴线互相平行,所述的两条从动支链组的下端虎克铰的下叉型铰链座与动平台的倾斜面相对位置处螺栓连接,所述的两条从动支链组的下端虎克铰十字轴连接动平台的轴线互相平行;所述的轴线均互相平行;
10、进一步地;所述的虎克铰包括上叉型铰链座、十字轴、下叉型铰链座和相应的轴承端盖;所述的上、下叉型铰链座整体构型呈u形,u形的两端均设置有孔洞;所述的孔洞内安装有回转轴承;所述的十字轴整体构型呈十字型;回转轴承内圈与十字轴相对应的转轴相固连;所述的回转轴承外侧均安装有相应轴承端盖;
11、进一步地;所述的连接架、布置于连接架和动平台之间两条从动支链组、动平台上的倾斜面位置共同构成空间等腰梯形;其连接架端两上叉型铰链座的距离大于动平台端两下叉型铰链座的距离;所述的腰与竖直方向的夹角为安装角(β),安装角(β)的角度可根据实际需求进行调整;
12、进一步地;所述的动平台左、右每一侧的倾斜面均平行设置有两个下叉型铰链座并螺栓连接;所述四条从动支链组的下叉型铰链座均与动平台左右两端的倾斜面位置处螺栓连接;
13、进一步地;所述的中心万向轴支链模块由中心驱动电机提供动力;中心驱动电机安装于定平台的下底中部的通孔位置处,所述的中心驱动电机与定平台的相对位置螺栓连接;所述的驱动电机的输出轴端穿过定平台的下底中部通孔与伸缩式万向节的上端通过柔性联轴器相连接;所述的末端执行器连接轴的上轴端与伸缩式万向节的下端通过柔性联轴器相连接;
14、进一步地;所述的动平台的中部设有一个不完全贯穿的凹坑及其下方的一个贯穿通孔;所述的动平台凹坑内设有凸台,凸台与动平台螺栓连接;凸台内部安装有回转轴承;
15、进一步地;所述的末端执行器连接轴与动平台中部的凸台转动连接;所述的末端执行器连接轴下端穿过动平台中部的孔洞;所述末端执行器末端与末端执行器销轴连接。
16、相对于现有技术,本发明的有益效果为:
17、本发明整体结构采用模块化设计,各构件之间通过基础的运动副进行连接,整体结构紧凑,具有较大的刚度和强度,具有大承载能力搬运的特点;其次,本发明可以实现“一机多模式、多自由度”的操作模式,可以适应多种工况和不同的工作环境,从而为物流分拣、产品搬运和打包提供了全新的技术方案。
技术特征:1.一种可实现2、3、4自由度的模块化高速并联机器人,包括并联机器人支撑模块、并联机器人主体结构模块和并联机器人中心万向轴支链模块,其特征在于:所述的并联机器人支撑模块包括工业铝型材双层框架和上丝杠传动模组;并联机器人主体结构模块包括定平台、线性驱动模组、连接架、动平台、布置于所述连接架和动平台之间的四条从动支链组;并联机器人中心万向轴支链模块包括中心驱动电机、柔性联轴器、伸缩式万向节、末端执行器连接轴和末端执行器。
2.根据权利要求1所述的一种可实现2、3、4自由度的模块化高速并联机器人,其特征在于:所述的工业铝型材双层框架包括四个竖直支撑柱,四个所述的竖直支撑柱的底部均安装有支脚;四个所述的竖直支撑柱之间每层通过四个横向条连接,四个所述的竖直支撑柱和四个横向条交错分布,相邻的支撑柱和横向条之间通过直角块连接。
3.根据权利要求1所述的一种可实现2、3、4自由度的模块化高速并联机器人,其特征在于:所述的线性驱动模组包括驱动电机、刚性联轴器、传动丝杠、基座、驱动滑块;所述的线性驱动模组的基座沿对应设置的定平台左右两腰长方向固定在定平台的相应位置上;所述的传动丝杠的输入轴端通过刚性联轴器和驱动电机的输出轴端相连接。
4.根据权利要求1所述的一种可实现2、3、4自由度的模块化高速并联机器人,其特征在于:所述的四条从动支链组均包括虎克铰和从动臂;从动臂的两端与其对应的虎克铰连接端相固连;所述的虎克铰包括上叉型铰链座、十字轴、下叉型铰链座和相应的轴承端盖;所述的上、下叉型铰链座整体构型呈u形,u形的两端均设置有孔洞;所述的孔洞内安装有回转轴承;所述的十字轴整体构型呈十字型;回转轴承内圈与十字轴相对应的转轴相固连;所述的回转轴承外侧均安装有相应轴承端盖。
技术总结本发明公开了一种可实现2、3、4自由度的模块化高速并联机器人。包括支撑框架、上丝杠传动模组、定平台、连接架、动平台、布置于所述连接架和动平台之间的四条从动支链组、中心万向轴支链组;所述的上丝杠传动模组设置于支撑框架上端中部;所述的定平台与上丝杠传动模组螺旋传动;所述的定平台左右两端位置安装有线性驱动模组;所述的连接架垂直面与驱动滑块相固接;所述的连接架水平面与两从动支链组上端相连接;所述的动平台与四条所述从动支链组下端相连接;所述的中心万向轴支链与末端执行器相连接;中心电机旋转带动末端执行器可实现整周回转。该并联机器人采用模块化设计,可实现三种自由度,操作模式多样,结构紧凑,适用多种复杂环境。技术研发人员:梁栋,冯世顺,畅博彦,张珺鹏,王文凯,崔满军,石浩昊受保护的技术使用者:天津工业大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49754.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
真空吸附平台的制作方法
下一篇
返回列表