一种仿生操作机器人的扩展支架的制作方法
- 国知局
- 2024-07-08 10:42:48
本发明涉及机器人,尤其涉及一种仿生操作机器人的扩展支架。
背景技术:
1、传统的在对变电站的巡检工作大多都是采用人工进行巡检,然而人工巡检对工人的知识水平要求较高。
2、随着人工智能的飞速发展,机器人也出现在了变电站的巡检工作中,虽然现有技术中出现了巡检机器人能够实现较多的复杂工况,但由于现有的变电站中较多设备是设置在箱体或柜体内的,而对将普通的箱体或柜体改为智能门锁需要花费较大。
3、因此,有必要提供一种新的仿生操作机器人的扩展支架解决上述技术问题。
技术实现思路
1、本发明解决的技术问题是提供一种使用方便、能够对普通的门锁进行开启或关闭,从而能够方便机械臂配合作业工具进行所需操作的仿生操作机器人的扩展支架。
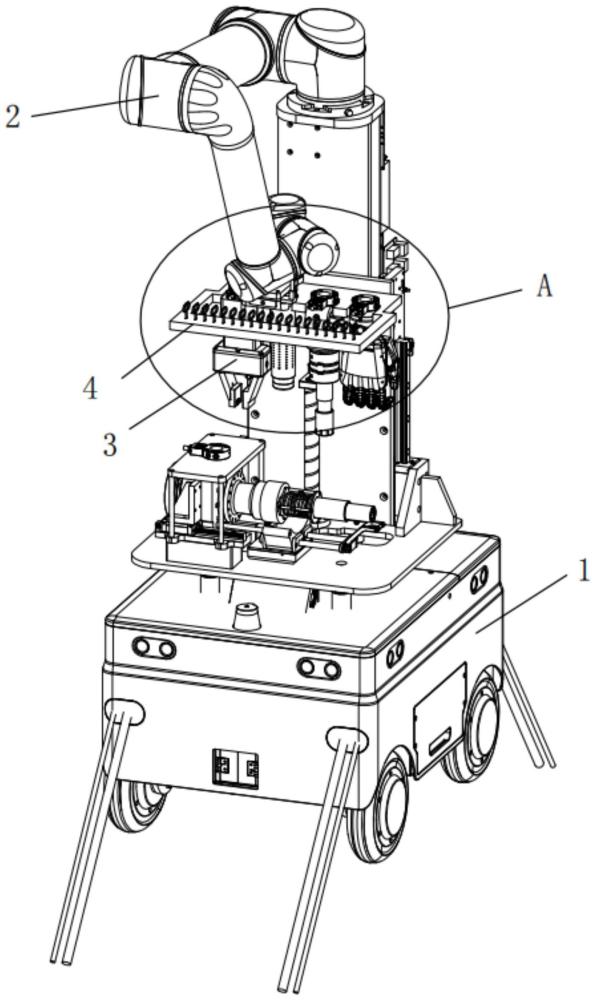
2、为解决上述技术问题,本发明提供的仿生操作机器人的扩展支架包括:安装在工具库上的支撑板,所述支撑板上开设有多个定位放置孔,所述定位放置孔内放置有钥匙,所述工具库上设有夹爪模块、内窥镜模块、手摇车动力模块和仿真手模块,所述夹爪模块上对称固定安装有两个连接块,两个连接块相互靠近的一侧均开设有凹槽,所述凹槽与所述钥匙相适配。
3、优选的,多个所述定位放置孔呈线性分布。
4、优选的,所述工具库固定安装在机器人本体上,所述机器人本体上设有机械臂,所述机械臂上设有第二信号模快。
5、优选的,所述夹爪模块、所述内窥镜模块、所述手摇车动力模块和所述仿真手模块上均固定安装有第一信号模块,其中一个所述第一信号模块可拆卸安装在所述第二信号模块上。
6、优选的,所述机械臂上固定安装有双目摄像头,所述双目摄像头固定套设在所述第二信号模块上。
7、优选的,所述支撑板为凹型设置,所述工具库上开设有四个呈矩形分布的安装槽,所述爪模块、所述内窥镜模块、所述手摇车动力模块和所述仿真手模块分别安装在四个所述安装槽内,所述安装槽靠近所述支撑板的一侧为开口设置。
8、所述机器人本体上固定安装有第一升降机构,所述机械臂固定安装在所述第一升降机构上,所述第一升降机构包括固定安装在所述机器人本体上的第一竖板,所述第一竖板上转动安装有第一丝杠,所述竖板上固定安装有第一电机,所述第一电机的输出轴与所述第一丝杠的一端固定连接,所述丝杠上螺纹套设有第一安装块,所述第一安装块与所述竖板滑动连接,所述第一安装块上固定安装有第二竖板,所述机械臂固定安装在所述第二竖板上。
9、所述机械臂包括第一转动轴,所述第一转动轴上转动安装有第二转动轴,所述第二转动轴上转动安装有第三转动轴,所述第三转动轴上固定安装有第四转动轴,所述第四转动轴上转动安装有第五转动轴,所述第二芯信号模块和所述安装架均安装在所述第五转动轴上。
10、所述机器人本体上安装有第二升降机构,所述第二升降机构上安装有地刀模块,所述第一竖板远离所述第一丝杠的一侧转动安装有第二丝杠,所述第二丝杠上螺纹安装有第二安装块,所述地刀模块安装在所述第二安装块上,所述第二安装块上固定安装有滑块,所述第一竖板的两侧均固定安装有滑轨,所述滑块滑动安装在所述滑轨上。
11、所述机器人本体上设有四个移动轮,所述机器人本体的两侧均设有激光雷达,所述激光雷达检测机器人本体行走路线上是否有障碍物。
12、与相关技术相比较,本发明提供的仿生操作机器人的扩展支架具有如下有益效果:
13、本发明提供一种仿生操作机器人的扩展支架,通过支撑板、钥匙、定位放置孔、连接块和凹槽相配合,能够利用夹爪模块自动拿起所需开启或关闭的箱门、柜门等,能够实现箱门、柜门的自动开启或关闭,从而能够方便放置在工具库上的夹爪模块、仿真手模块、内窥镜模块和手摇车动力模块实现保护装置操作和紧急分合闸操作等。
技术特征:1.一种仿生操作机器人的扩展支架,其特征在于,包括:
2.根据权利要求1所述的仿生操作机器人的扩展支架,其特征在于,多个所述定位放置孔呈线性分布。
3.根据权利要求1所述的仿生操作机器人的扩展支架,其特征在于,所述工具库固定安装在机器人本体上,所述机器人本体上设有机械臂,所述机械臂上设有第二信号模快。
4.根据权利要求3所述的仿生操作机器人的扩展支架,其特征在于,所述夹爪模块、所述内窥镜模块、所述手摇车动力模块和所述仿真手模块上均固定安装有第一信号模块,其中一个所述第一信号模块可拆卸安装在所述第二信号模块上。
5.根据权利要求4所述的仿生操作机器人的扩展支架,其特征在于,所述机械臂上固定安装有双目摄像头,所述双目摄像头固定套设在所述第二信号模块上。
6.根据权利要求1所述的仿生操作机器人的扩展支架,其特征在于,所述支撑板为凹型设置,所述工具库上开设有四个呈矩形分布的安装槽,所述爪模块、所述内窥镜模块、所述手摇车动力模块和所述仿真手模块分别安装在四个所述安装槽内,所述安装槽靠近所述支撑板的一侧为开口设置。
7.根据权利要求3所述的仿生操作机器人的扩展支架,其特征在于,所述机器人本体上固定安装有第一升降机构,所述机械臂固定安装在所述第一升降机构上,所述第一升降机构包括固定安装在所述机器人本体上的第一竖板,所述第一竖板上转动安装有第一丝杠,所述竖板上固定安装有第一电机,所述第一电机的输出轴与所述第一丝杠的一端固定连接,所述丝杠上螺纹套设有第一安装块,所述第一安装块与所述竖板滑动连接,所述第一安装块上固定安装有第二竖板,所述机械臂固定安装在所述第二竖板上。
8.根据权利要求4所述的仿生操作机器人的扩展支架,其特征在于,所述机械臂包括第一转动轴,所述第一转动轴上转动安装有第二转动轴,所述第二转动轴上转动安装有第三转动轴,所述第三转动轴上固定安装有第四转动轴,所述第四转动轴上转动安装有第五转动轴,所述第二芯信号模块和所述安装架均安装在所述第五转动轴上。
9.根据权利要求5所述的仿生操作机器人的扩展支架,其特征在于,所述机器人本体上安装有第二升降机构,所述第二升降机构上安装有地刀模块,所述第一竖板远离所述第一丝杠的一侧转动安装有第二丝杠,所述第二丝杠上螺纹安装有第二安装块,所述地刀模块安装在所述第二安装块上,所述第二安装块上固定安装有滑块,所述第一竖板的两侧均固定安装有滑轨,所述滑块滑动安装在所述滑轨上。
10.根据权利要求6所述的仿生操作机器人的扩展支架,其特征在于,所述机器人本体上设有四个移动轮,所述机器人本体的两侧均设有激光雷达,所述激光雷达检测机器人本体行走路线上是否有障碍物。
技术总结本发明提供一种仿生操作机器人的扩展支架。所述仿生操作机器人的扩展支架包括安装在工具库上的支撑板,所述支撑板上开设有多个定位放置孔,所述定位放置孔内放置有钥匙,所述工具库上设有夹爪模块、内窥镜模块、手摇车动力模块和仿真手模块,所述夹爪模块上对称固定安装有两个连接块,两个连接块相互靠近的一侧均开设有凹槽,所述凹槽与所述钥匙相适配,多个所述定位放置孔呈线性分布,所述工具库固定安装在机器人本体上,所述机器人本体上设有机械臂,所述机械臂上设有第二信号模快。本发明提供的仿生操作机器人的扩展支架具有使用方便、能够对普通的门锁进行开启或关闭,从而能够方便机械臂配合作业工具进行所需操作的优点。技术研发人员:孔令东,万轶伦,方攀宇,张苏捷,赵峰,钱伟强,孙明悦,夏泳嘉,徐鑫裕,姜圆圆,江斌开,陆志浩,魏本刚,杨世皓,王宗煜,曲晓东,李志明,揭晶,刘裕韬受保护的技术使用者:国网上海市电力公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49856.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表