一种机器人摩擦力矩和惯性关联力矩的快速分离方法与流程
- 国知局
- 2024-07-08 10:45:39
本发明涉及机器人控制,尤其涉及一种机器人摩擦力矩和惯性关联力矩的快速分离方法。
背景技术:
1、精准辨识出机器人动力学参数对于高性能应用至关重要,例如拖动示教、碰撞检测、伺服控制等等。事实上,机器人的运动与关节力矩间蕴含着动力学行为。因此,可由采集的关节力矩和关节运动信息估计出动力学参数。动力学参数包含两类,其一是连杆的质量、质心和惯性张量元素,它们统称为惯性参数,其二是摩擦系数。换言之,关节的测量力矩由两部分构成,即惯性参数贡献的惯性关联力矩和摩擦系数贡献的摩擦力矩。在牛顿力学意义下,惯性参数可由线性回归模型的形式呈现,且惯性参数具有定常性。相比之下,摩擦系数随温度、润滑等状态变化,呈非定常性。然而,在机器人的关节测量力矩中,惯性关联力矩与摩擦力矩是紧耦合的,因此无法对惯性参数或摩擦系数单独辨识,普遍方案是将惯性参数与摩擦系数在统一的线性回归框架下实施参数估计。然而,非定常摩擦系数将影响定常惯性参数的估计精度。此外,以简化的线性回归形式构建摩擦模型将对复杂的摩擦行为刻画造成未建模误差。因此,实现对惯性关联力矩与摩擦力矩从实测的关节力矩快速分离具有重要的现实意义。
2、目前,已公开的有关机器人摩擦辨识的专利主要以单轴独立旋转方式,或是基于关节模组运动实施摩擦分离。具体的,中国发明专利《一种摩擦辨识方法、摩擦辨识装置以及机器人》(申请公布号:cn 113547544 a)公开了一种对机器人关节摩擦独立辨识的方法,其需要针对关节轴是否与重力方向平行而采用不同的实施策略,摩擦数据的提取需要控制单关节轴独立运动,且限制为匀速状态。中国发明专利《一种考虑重力影响的机器人电机端惯量及摩擦力辨识方法》(申请公布号:cn 116317774 a)公开了一种对电机单轴独立运动的摩擦力矩识别方法,其适用于简单的库伦摩擦和粘性摩擦模型,且不适用于消除多关节联动状态下的重力影响。中国发明专利《机器人关节摩擦模型的参数辨识方法和装置、力矩估计方法和装置》(申请公布号:cn 116442220 a)公开了一种摩擦模型的智能启发式估计方法,其中需要求电机处于空载状态,这对于实际运行工况的工业机器人并不适用。中国发明专利《一种机器人摩擦力辨识方法》(申请公布号:cn 111177941 a)公开了一种摩擦力矩计算方法,需要保持单关节独立匀速运动,且需要先验知道机器人的惯性参数。中国发明专利《一种差动关节的动力学参数辨识方法》(申请公布号:cn 115284294 a)公开了一种针对差动关节模组的摩擦力矩和惯性关联力矩分离方法,其未考虑加速度的状态,不适用于多关节机器人在多轴联动下的力矩分离。中国发明专利《一种串联机器人动力学参数辨识方法》(申请公布号:cn 109284580 a)公开了针对多关节串联机器人的动力学辨识技术,包括对惯性关联力矩和摩擦力矩的分离,然而所述分离技术为从连杆末端关节依次向靠基座处关节独立实施单关节的分离运动,无法适用于并联机器人,也未考虑伺服跟踪误差对多轴联动造成的对称性影响。
3、国内目前尚无专利公开在机器人执行多轴联动的持续激励轨迹条件下,从测量的关节力矩中分离惯性关联力矩与摩擦力矩的有效技术。现有技术未考虑多轴联动各关节伺服跟踪误差对运动对称性的影响,且现有技术须各关节独立运动实施力矩分离。
技术实现思路
1、本发明的目的在于提供一种可对多关节机器人进行一次激励运动即可分离出各关节摩擦力矩和惯性关联力矩的分离方法。
2、为达到上述目的,本发明采用如下技术方案:一种机器人摩擦力矩和惯性关联力矩的快速分离方法,包括如下步骤:
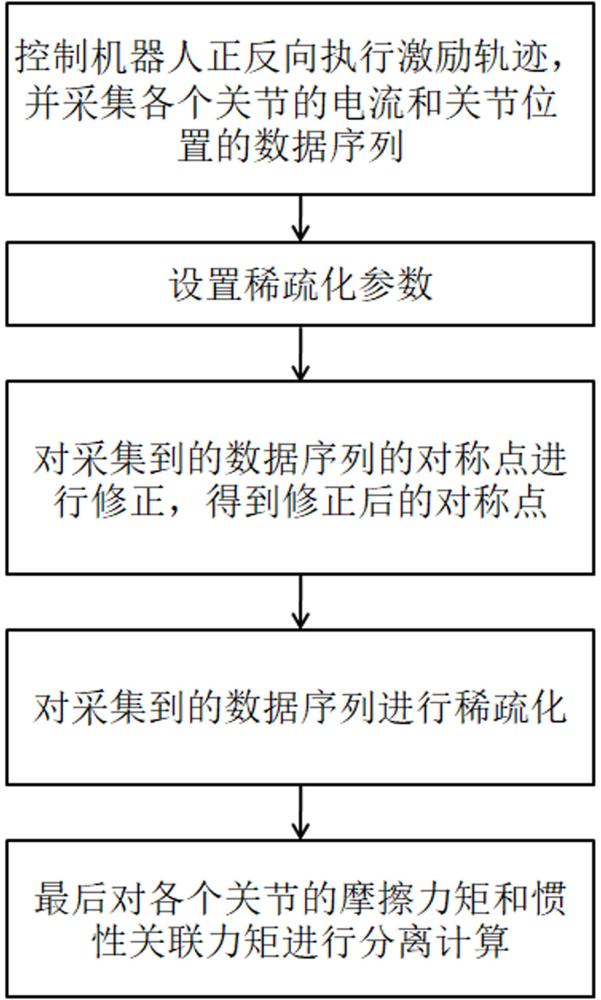
3、s01、控制机器人先后正向和反向执行激励轨迹,以为采样周期采集机器人各个关节的电流数据和关节位置数据,每采集一次数据即为一个采样步,以此得到电流时间序列和位置时间序列;其中为关节编号,为采样步的编号,,所述,其中为机器人正向执行激励轨迹的时长;其中,正向执行激励轨迹的采样步序列为,反向执行激励轨迹的采样步序列为,其中对称点的采样步编号为。
4、s02、设置针对步骤s01中采集到的个采样步的数据进行稀疏化的稀疏化参数,包括第一个稀疏化采样步的编号,以及稀疏化采样步间隔。
5、s03、对步骤s01中的对称点进行修正,记修正后的对称点的采样步编号为。
6、s04、根据步骤s03得到的修正后的对称点,对正向执行激励轨迹和反向执行激励轨迹的采样步序列进行修正,得到,修正后的正向执行激励的采样步序列,以及修正后的反向执行激励轨迹的采样步序列。
7、s05、根据修正后的正向执行激励轨迹的采样步序列,对第一个稀疏化采样步的编号进行修正,得到修正后的第一个稀疏化采样步编号=,其中,=,其中为根据修正后的对称点对第一个稀疏化采样布编号的修正参数,,同时对修正后的正向执行激励轨迹的采样步序列进行稀疏化处理,得到修正稀疏化后的正向执行激励轨迹的采样步序列:、、……、,其中,为修正稀疏化后的正向执行激励轨迹的采样步数,,其中。
8、s06、根据修正稀疏化后的正向执行激励轨迹的采样步序列,以及修正后的对称点采样步编号,得到反向执行激励轨迹的采样步序列后并将其倒序排列,使其与修正稀疏化后的正向执行激励轨迹的采样步序列相对于修正后的对称点互相对称:、、……、,。
9、s07、根据步骤s05和步骤s06得到的修正稀疏化后的正向执行激励轨迹和反向执行激励轨迹的采样步序列,计算各个关节在正向执行激励轨迹的力矩序列:、、……、,其中,;以及各个关节在反向执行激励轨迹的力矩序列:、、……、,其中,;其中,为编号为的关节的电机转矩常数,为编号为的关节的关节减速比。
10、s08、最后分离计算编号为的关节在第对采样步的惯性关联力矩和摩擦力矩:
11、
12、
13、其中,,为编号为的关节在第对采样步的惯性关联力矩,为编号为的关节在第对采样步的摩擦力矩。
14、具体的,步骤s03中,对对称点进行修正的具体方法如下:
15、s31、分别计算各个关节的对称点修正步数,其中为关节的编号,为使得取最小值时的值;对中>的位置数据进行补充。
16、s32、确定整体的对称点修正步数,,其中n为关节总数。
17、具体的,对于中>时,取=。
18、具体的,步骤s02中的第一个稀疏化采样步编号,以及稀疏化采样步间隔,采用如下方法计算得到:,,其中,为机器人初始运动时克服静摩擦力至稳定运行所消耗的时间,为稀疏化后采样步之间的最大时间间隔。
19、本发明的有益效果在于:1)惯性关联力矩与摩擦力矩的分离操作适用于多关节机器人,包括串联机器人和并联机器人,且无需配置额外的装置,无需对关节拆卸,实现机器人原位操作;2)考虑了伺服跟踪误差对运动对称点造成的现实影响,形成了针对多轴联动运动对称点修正的可行技术;3)能在执行多关节联动的激励轨迹条件下,实现一次激励分离出所有关节的惯性关联力矩和摩擦力矩,且既能满足非线性复杂摩擦模型的辨识,也兼顾惯性参数的估计,避免了多次独立关节运动分离现状的耗时缺陷。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50187.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表