一种机械爪及其机械手臂和果蔬采摘机器人
- 国知局
- 2024-07-08 10:45:35
本技术涉及机器人领域,更具体的说是涉及一种机械爪及其机械手臂和果蔬采摘机器人。
背景技术:
1、2019年,我国温室大棚面积中果园种植面积共计1.8415亿亩,在果园的生产作业中,收获采摘是整个生产中最耗时最费力的一个环节。水果收获期间需投入的劳力约占整个种植过程的50%~70%,加之水果收获具有很强的时效性,属于典型的劳动密集型的工作,故采摘作业质量的好坏直接影响到水果的储存、加工和销售,从而最终影响市场价格和经济效益。
2、目前国内水果采摘仍然是手工完成,自动化程度较低。在一些国家,由于人口老龄化和农业劳动力减少,劳动力成本高且少,而人工采摘水果的成本占整个生产成本的33%~50%。因此,市场需要一种全自动且采摘精准的机器人来代替人工作业。
3、因此,如何提供一种可以提高人工效率,节约劳动成本,降低工作危险性,使采摘工作更容易,同时兼具多方位采摘、一体化采收、且结构简单果蔬采摘机器人,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本实用新型提供了一种机械爪及其机械手臂和果蔬采摘机器人,旨在解决上述技术问题。
2、为了实现上述目的,本实用新型采用如下技术方案:
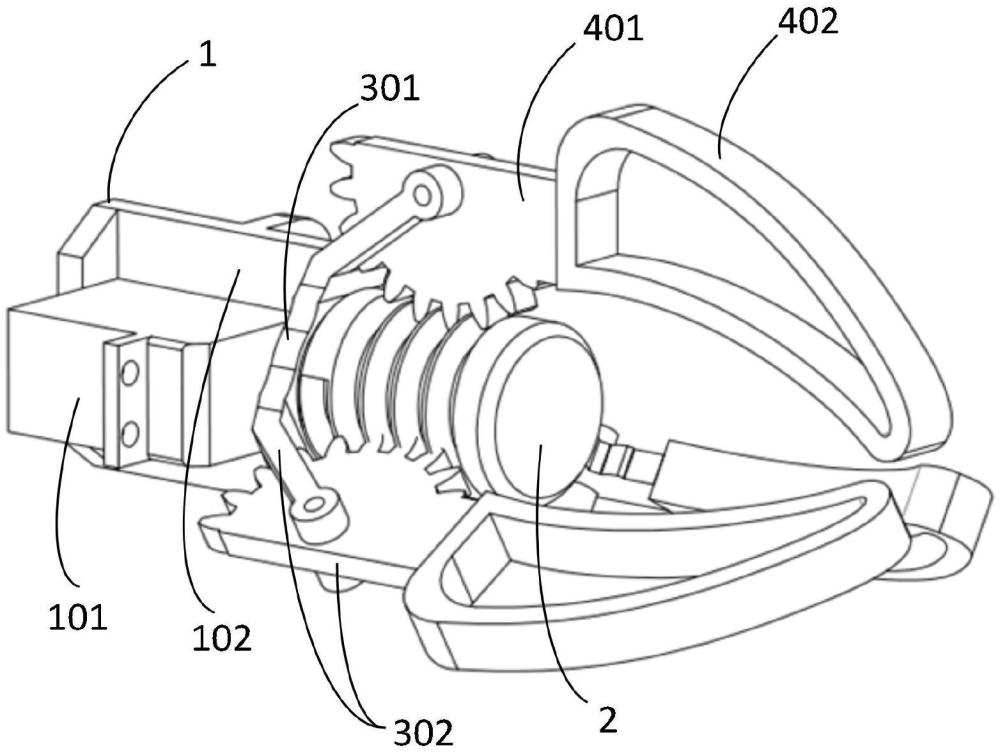
3、本实用新型提供了一种机械爪,包括:第一驱动组件、螺纹丝杆、固定架和爪;所述螺纹丝杆的一端与所述第一驱动组件的驱动输出端同轴固定连接;所述固定架包括:环形框架和夹持杆,所述环形框架套设在所述螺纹丝杆的外侧,所述环形框架固定连接在所述第一驱动组件与所述螺纹丝杆连接的侧壁上;所述夹持杆数量为多个,多个所述夹持杆的一端均固定连接在所述环形框架上,多个所述夹持杆两两一组,相邻两个所述夹持杆之间留有间隙;所述爪的两端分别为连接端和夹取端,所述连接端为半齿轮状结构,所述半齿轮状结构转动连接在同组的两个所述夹持杆形成的间隙内,所述连接端的齿纹与所述螺纹丝杆的螺纹啮合,所述爪的夹取端为指尖状结构,所述指尖状结构固定连接在所述半齿轮状结构的一侧。
4、经由上述技术方案可知,与现有技术相比,本实用新型公开提供了一种机械爪,通过第一驱动组件驱动螺纹丝杆前进,这时啮合在螺纹丝杆上的半齿轮状结构绕圆心旋转,进而带动爪的夹取端张开,以此使目标物进入爪的夹取端的夹取空间内;然后通过第一驱动组件驱动螺纹丝杆后退,这时啮合在螺纹丝杆上的半齿轮状结构绕圆心旋转,进而带动爪的夹取端闭合,以此来完成对目标物的夹取;过程中夹持杆两两一组,通过对爪的固定端进行转动连接,以此来确保爪开合的顺利进行,且爪的夹取端仿生人的指尖,更加方便目标物的夹取。
5、优选的,所述指尖状结构的内侧贴合有电阻式薄膜压力传感器;通过压力传感器来获取目标物在爪内的具体位置,确保对目标物的抓取到位。
6、上述技术方案的有益效果为:通过第一驱动组件驱动螺纹丝杆前进,进而使与其啮合的爪开合,该结构不仅结构简单,在操作过程中规避了意外机器故障的发生,而且通过夹持杆对爪进行夹持,增强了装置连接强度,确保装置的稳定性,以此实现精准定位夹取,提高了机械爪的工作效率。
7、本实用新型还提供了一种机械手臂,包括:安装基座、第二驱动组件、大臂、第三驱动组件、第四驱动组件和小臂;所述第二驱动组件固定连接在所述安装基座顶端;所述大臂的一端与所述第二驱动组件的驱动输出端固定连接,所述第二驱动组件驱动所述大臂在水平面内转动;所述第三驱动组件固定连接在所述大臂的远离所述第二驱动组件的一端;所述第四驱动组件与所述第三驱动组件的动力输出端固定连接,所述第三驱动组件驱动所述第四驱动组件在竖直平面内转动;所述小臂的一端与所述第四驱动组件的动力输出端固定连接,所述第四驱动组件驱动所述小臂在水平面内转动,所述小臂的另一端与上述的第一驱动组件固定连接。
8、通过上述技术方案,本实用新型提供的机械手臂中,通过仿生模拟人类的手臂关节,完成对目标物的夹取;具体为:通过第二驱动组件驱动大臂在水平平面内旋转,通过第三驱动组件驱动第四驱动组件和小臂在竖直平面内转动,第四驱动组件驱动小臂在水平平面内转动,小臂的末端连接有机械爪;在操作机械臂的使用过程中通过第二驱动组件和第四驱动组件完成对目标物定位,后通过机械爪将目标物夹取固定之后,通过驱动第三驱动组件的旋转将目标物摘下。
9、优选的,所述第一驱动组件、所述第二驱动组件、所述第三驱动组件和所述第四驱动组件均采用伺服电机作为驱动力,通过伺服电机末端的编码器对机械臂的行进路程进行编程,后通过计算机对机械臂的位置进行定位,从而实现机械臂在空间的多角度、多方位的移动。
10、上述技术方案的有益效果为:因为本实用新型中的第四驱动组件和小臂是安装在第三驱动组件上,所以在驱动机械手臂旋转时,只需通过编程控制第三驱动组件即可,操作步骤简单;基于对机械臂简单的控制流程,因此相对于传统的机械手臂,本实用新型中的结构更加稳定。
11、本实用新型还提供了一种果蔬采摘机器人,包括:行进机构、收集机构和图像采集机构;所述收集机构固定连接在所述行进机构的上端面,所述收集机构包括:收集箱和旋转盘,所述收集箱固定在所述行进机构的上端面,所述收集箱为顶面和两侧面开口的“u”型框架,所述收集箱底面的面积大于顶面的面积,所述收集箱底面延伸部分固定连接有多个上述的具有机械爪的机械手臂;所述旋转盘的数量为多个,多个所述旋转盘通过转轴转动连接在所述收集箱底面的两侧,所述旋转盘的一侧安装有驱动所述旋转盘转动的第五驱动组件,所述转轴与所述第五驱动组件的动力输出轴固定连接;所述图像采集机构固定连接在所述收集箱的内侧壁上。
12、通过上述技术方案,本实用新型提供了一种果蔬采摘机器人,当行进机构行进至果蔬植株面前时,固定连接在收集箱内侧壁上的图像采集机构为openmv,通过该装置采集目标物的信息,以此对目标物的位置进行精准定位,然后调整机械手臂到达最佳的采摘位置,完成对目标物的采摘;采摘完成后通过openmv对采摘到的果蔬进行目标大小的识别,再将果实放置在对应的旋转盘内,等到旋转盘内的果实收集满了以后,通过第五驱动组件使旋转盘进行旋转,将两个旋转盘和“u”型框架结构的收集箱组成顶端开口的箱体结构,用于对果实的盛放。
13、优选的,所述行进机构包括:安装板和车轮组,所述安装板的上端面固定连接有电机驱动模块和控制模块,所述安装板的下端面固定连接有超声波传感器和红外测距传感器;所述车轮组呈矩阵安装在所述安装板的下端面,所述车轮组的控制端与所述电机驱动模块的信号输出端电连接,所述控制模块的信号输出端与所述电机驱动模块的信号输入端电连接;通过电机驱动模块驱动车轮组使整体装置进行移动,在移动的过程中通过超声波传感器和红外测距传感器对棚内地形进行测距检测,将获得的信息传回控制模块,从而对地形进行分析后发出避障指令,控制模块采用ni myrio控制板组成,ni myrio控制板的集成程度高,可完成多功能的信息接收和控制指令。
14、优选的,所述安装板包括:前底板和后底板,所述前底板和所述后底板之间通过摆式悬挂转动连接,通过摆式悬挂将前底板和后底板转动连接在一起,使车身结构更加灵活,以适应更加复杂的果蔬采摘环境。
15、优选的,所述第五驱动组件采用伺服电机作为驱动力,通过编码器对伺服电机进行编程,从而实现自主控制车轮组的前进后退。
16、优选的,所述后底板下方端面上固定有电池盒,所述电池盒内安装有电池组,所述电池组的能量输出端与所述车轮组件的供电端电连接。
17、优选的,所述车轮组件包括:电机支架、直流编码电机和车轮,所述电机支架固定安装在前底板的下端面上,所述直流编码电机固定连接在所述电机支架内,所述直流编码电机的信号输入端与所述电机驱动模块的信号输出端电连接,所述直流编码电机的能量输入端与所述电池组的供电端电连接,所述车轮与所述直流编码电机的动力输出端固定连接;通过所述直流编码电机的信号输入端与所述电机驱动模块的信号输出端电连接,可以通过编程控制所述直流编码电机的正反转及转速,进一步通过控制所述车轮实现前进后退和转向,以此来适应复杂棚室环境。
18、经由上述的技术方案可知,与现有技术相比,本实用新型公开提供了一种机械爪及其机械手臂和果蔬采摘机器人,具有以下有益效果:
19、1、本实用新型通过机械爪的设置,通过爪的连接端和螺纹丝杆之间的转动连接,所以只需通过电机驱动螺纹丝杆的前进和后退就可以实现爪的开合,该机械爪不仅结构简单,而且通过固定架对爪的连接端进行限位,增强了装置的结构稳定性。
20、2、本实用新型通过收集机构的设置,收集箱底板两翼的旋转盘不仅可以用于收集和盛放采摘到的果实,而且在驱动电机的作用下,旋转盘向上升起,与两侧面开口的“u”型框架收集箱组成顶端开口的完整箱体,用于盛放采摘到的果实。
21、3、本实用新型通过摆式悬挂结构的设置,将安装板分为前底板和后底板,前底板和后底板之间通过摆式悬挂转动连接,在车辆运行的过程中,摆式悬挂能够使得前底板和后底板之间产生相对位置的定轴旋转,以适应更加复杂的棚内环境,同时满足地垄过障需求。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50175.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表