一种可远程控制的光伏清洁机器人的制作方法
- 国知局
- 2024-07-08 10:45:43
本发明涉及机器人的领域,尤其涉及一种可远程控制的光伏清洁机器人。
背景技术:
1、光伏板设置在户外环境,其用于吸收太阳光并转换为电能。当光伏板长期受到户外环境的影响,其表面会不可避免积聚尘埃等微粒,使得到达光伏板表面的太阳光被散射以及降低光伏板对太阳光的吸收效率,从而影响光伏板的发电效率。为了保证光伏板的正常稳定发电,需要定期对光伏板表面进行清洁,同时为了提高对光伏板的清洁效率,会借助清洁机器人来实现自动清洁。通常而言,清洁机器人都是按照预先设定模式在光伏板表面沿着指定路径进行清洁,使得清洁机器人无法根据现场实际情况适应性改变清洁方式,容易发生清洁遗漏和清洁不彻底的情况发生,降低对光伏板的清洁效率和可靠性。
技术实现思路
1、本发明的目的在于提供可远程控制的光伏清洁机器人,在对光伏板进行清洁过程中进行定位识别,得到清洁机器人的定位数据,以此确定清洁机器人在光伏板表面上的运动轨迹,并结合清洁机器人的清洁动作状态信息,确定光伏板表面上的已清洁区域信息,从而确定光伏板上的未清洁区域分布信息,为清洁机器人准确限定清洁操作执行范围;还根据清洁机器人的实时位置信息和未清洁区域分布信息,确定清洁机器人对所有未清洁区域进行清洁操作对应的运动路径,保证清洁机器人能够有序进行清洁操作;还分析清洁操作过程中相应的光伏板表面影像,确定光伏板表面的污渍存在状态信息,以此调整清洁机器人的清洁动作状态,提高清洁效率和彻底性以及避免发生清洁遗漏情况。
2、本发明是通过以下技术方案实现:
3、一种可远程控制的光伏清洁机器人,包括:
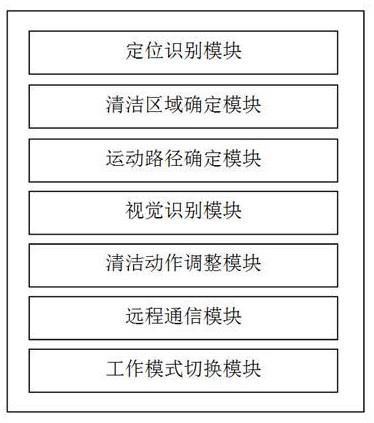
4、定位识别模块,用于对清洁机器人在对光伏板进行清洁过程中进行定位识别,得到所述清洁机器人的定位数据;根据所述定位数据,确定所述清洁机器人在所述光伏板表面上的运动轨迹;
5、清洁区域确定模块,用于根据所述运动轨迹和所述清洁机器人的清洁动作状态信息,确定所述清洁机器人在所述光伏板表面上的已清洁区域信息;根据所述已清洁区域信息,确定所述光伏板表面的未清洁区域分布信息;
6、运动路径确定模块,用于根据所述清洁机器人的实时位置信息和所述未清洁区域分布信息,确定所述清洁机器人对所有未清洁区域进行清洁操作对应的运动路径;
7、视觉识别模块,用于采集所述清洁机器人对所述未清洁区域进行清洁操作过程中相应的光伏板表面影像,并对所述光伏板表面影像进行分析,确定光伏板表面的污渍存在状态信息;
8、清洁动作调整模块,用于根据所述污渍存在状态信息,调整对相应未清洁区域的清洁动作状态;
9、远程通信模块,用于将所述清洁机器人与远程控制平台连接,并将所述清洁机器人的实时清洁动作影像和所述清洁机器人的实时内置部件状态信息上传至所述远程控制平台;
10、工作模式切换模块,用于根据来自所述远程控制平台的控制指令,切换所述清洁机器人当前的工作模式。
11、可选地,所述定位识别模块用于对清洁机器人对光伏板进行清洁过程中进行定位识别,得到所述清洁机器人的定位数据;根据所述定位数据,确定所述清洁机器人在所述光伏板表面上的运动轨迹,包括:
12、根据清洁机器人当前的清洁停留持续时间,确定对所述清洁机器人进行定位识别的定位时间间隔;根据所述定位时间间隔,对所述清洁机器人对光伏板进行清洁过程中进行周期性定位识别,得到相应的定位数据;
13、根据所述光伏板的表面四周边界位置,对所述定位数据进行拟合处理,确定所述清洁机器人在所述光伏板表面上的运动轨迹。
14、可选地,所述清洁区域确定模块用于根据所述运动轨迹和所述清洁机器人的清洁动作状态信息,确定所述清洁机器人在所述光伏板表面上的已清洁区域信息;根据所述已清洁区域信息,确定所述光伏板表面的未清洁区域分布信息,包括:
15、获取所述清洁机器人在所述运动轨迹对应的所有停留清洁位置点各自对应的清洁动作覆盖半径信息,根据所述运动轨迹,对所有停留清洁位置点的清洁动作覆盖半径信息进行整合处理,得到所述清洁机器人在所述光伏板表面上的已清洁区域覆盖范围信息;
16、根据所述光伏板表面全局范围信息和所述已清洁区域覆盖范围信息,确定所述光伏板表面的未清洁区域分布信息;其中,所述未清洁区域分布信息包括所有未清洁区域各自在所述光伏板表面的区域边界信息。
17、可选地,所述运动路径确定模块用于根据所述清洁机器人的实时位置信息和所述未清洁区域分布信息,确定所述清洁机器人对所有未清洁区域进行清洁操作对应的运动路径,包括:
18、根据所述清洁机器人的实时位置信息和所述未清洁区域分布信息,识别所述清洁机器人当前最接近的未清洁区域,并确定所述清洁机器人运动至当前最接近的未清洁区域的最短路径;
19、根据所述清洁机器人当前所在的未清洁区域的区域边界信息,确定所述清洁机器人对当前所在的未清洁区域进行清洁操作对应的运动路径,从而使所述清洁机器人沿所述运动路径对所述未清洁区域进行清洁时具有最小运动路程。
20、可选地,所述视觉识别模块用于采集所述清洁机器人对所述未清洁区域进行清洁操作过程中相应的光伏板表面影像,并对所述光伏板表面影像进行分析,确定光伏板表面的污渍存在状态信息,包括:
21、在所述清洁机器人对所述未清洁区域进行清洁操作过程中对清洁操作覆盖的范围进行扫描拍摄,得到相应的光伏板表面影像;对所述光伏板表面影像进行画面像素轮廓分析,得到所述光伏板表面影像的画面像素轮廓特征信息;根据所述画面像素轮廓特征信息,确定光伏板表面的污渍存在状态信息;其中,所述污渍存在状态信息包括污渍覆盖范围信息和污渍厚度分布信息。
22、可选地,所述清洁动作调整模块用于根据所述污渍存在状态信息,调整对相应未清洁区域的清洁动作状态,包括:
23、根据所述污渍覆盖范围信息,调整对相应未清洁区域的清洁动作幅度;根据所述污渍厚度分布信息,调整对相应未清洁区域的清洁动作频率。
24、可选地,所述远程通信模块用于将所述清洁机器人与远程控制平台连接,并将所述清洁机器人的实时清洁动作影像和所述清洁机器人的实时内置部件状态信息上传至所述远程控制平台,包括:
25、根据所述清洁机器人的所在网关信息,将所述清洁机器人与远程控制平台连接,并将所述清洁机器人的实时清洁动作影像和所述清洁机器人的实时电池电量信息和实时污渍收集量信息打包上传至所述远程控制平台;
26、通过所述远程控制平台对接收到的实时清洁动作影像进行分析,判断所述清洁机器人是否完成当前区域的清洁操作,以此返回相应的控制指令;
27、通过所述远程控制平台对接收到的实时电池电量信息进行分析,判断所述清洁机器人是否处于电量耗尽状态,以此返回相应的控制指令;
28、通过所述远程控制平台对接收到的实时污渍收集量信息进行分析,判断所述清洁机器人是否处于污渍收集饱和状态,以此返回相应的控制指令。
29、可选地,所述远程通信模块将所述清洁机器人的实时清洁动作影像和所述清洁机器人的实时电池电量信息和实时污渍收集量信息打包上传至所述远程控制平台,包括:
30、步骤s1,利用下面公式(1),根据所述清洁机器人的实时电池电量信息,确定将打包后的信息进行上传的最大上传限制时长,
31、(1),
32、在上述公式(1)中,表示将所述打包后的信息进行上传的最大上传限制时长;表示所述清洁机器人的实时电池电量值;表示可维持所述清洁机器人正常工作的最低电池电量值;表示上传一次数据所需要消耗的电量值;表示上传一次数据所需要的历史平均时长;
33、步骤s2,利用下面公式(2),根据打包后的信息上传的上传速率和所述打包后的信息的数据量以及将所述打包后的信息进行上传的最大上传限制时长,控制所述清洁机器人进行上传的最大上传次数,
34、(2),
35、在上述公式(2)中,表示所述清洁机器人进行上传的最大上传次数;表示所述打包后的信息的数据量;表示所述打包后的信息上传的上传速率;表示对括号内的数值进行向下取整;
36、若,则表示当前清洁机器人的剩余电量在上传完信息后将无法继续保持工作状态,此时转换上传信息为电量耗尽状态信息进行上传;
37、步骤s3,利用下面公式(3),根据打包后的信息的数据量以及将所述打包后的信息进行上传的最大上传次数,确定所述打包后的信息上传至所述远程控制平台的最终上传次数,
38、 (3),
39、在上述公式(3)中,表示所述打包后的信息上传至所述远程控制平台的最终上传次数;表示单位数据量;表示求取括号内逗号左右两端数值中的最大值。
40、可选地,所述工作模式切换模块用于根据来自所述远程控制平台的控制指令,切换所述清洁机器人当前的工作模式,包括:
41、根据来自所述远程控制平台的控制指令,将所述清洁机器人切换至定向清洁工作模式、低能耗工作模式或者停止工作模式。
42、与现有技术相比,本发明具有如下有益效果:
43、本技术提供的可远程控制的光伏清洁机器人在对光伏板进行清洁过程中进行定位识别,得到清洁机器人的定位数据,以此确定清洁机器人在光伏板表面上的运动轨迹,并结合清洁机器人的清洁动作状态信息,确定光伏板表面上的已清洁区域信息,从而确定光伏板上的未清洁区域分布信息,为清洁机器人准确限定清洁操作执行范围;还根据清洁机器人的实时位置信息和未清洁区域分布信息,确定清洁机器人对所有未清洁区域进行清洁操作对应的运动路径,保证清洁机器人能够有序进行清洁操作;还分析清洁操作过程中相应的光伏板表面影像,确定光伏板表面的污渍存在状态信息,以此调整清洁机器人的清洁动作状态,提高清洁效率和彻底性以及避免发生清洁遗漏情况。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50195.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表